一种弹载雷达辅助地速测量的实现方案
2021-08-23赵毅寰尹建勇杨红乔陈伟廖华山
赵毅寰 尹建勇 杨红乔 陈伟 廖华山


摘 要: 为了解决卫星信号不可用条件下长航时导弹精确导航的问题,提出了一种复用弹载制导雷达进行载体地速测量的一体化设计方案。对“X”型、“T”型天线布局方式下三维地速测量的计算方法进行了推导,设计天线波束参数、波形参数、射频组件和信号处理架构。对该系统的测速误差进行了分析。结果表明,复用弹载制导雷达进行载体地速的辅助测量,能够满足载体导航速度修正的需求,提高了设备集成度。
关键词:导航;多普勒测试;制导雷达;速度修正;地速测量
中图分类号:TJ760; V448 文献标识码: A 文章编号:1673-5048(2021)03-0065-06
0 引 言
由于单一的导航手段无法满足远程精确导航的需要,现代长航时飞行器和大射程导弹通常利用惯性导航和卫星导航组合的方式保证导航精度。在卫星信号不可用时,对航路规划敏感的武器系统(如基于成像匹配弹道纠偏的导弹)需要一种不依赖于外界资源的完全自主式的组合导航方式[1]。多普勒测速仪结合惯性导航就是其中一种重要手段。
导弹和无人机等飞行载体对设备尺寸、重量和成本有严格限制,在一种设备上尽可能实现较多的功能将是发展方向[2-3]。具有雷达载荷的长航时飞行器,再增加多普勒测速仪进行航路修正,大大增加传感器载荷的体积、重量和成本。因此,将制导雷达与多普勒测速仪一体化集成设计,是空面攻击大射程导弹的一个可选技术方向。近年来,脉冲多普勒体制制导雷达广泛应用于精确制导武器, 多普勒测速仪在直升机等飞行器上也获得了应用。二者的工作原理和产品研制技术已趋于成熟,而利用弹载制导雷达复合进行地速辅助测量的集成化设计技术尚未见公开报道。
1 多普勒测速原理
多普勒测速仪以大地为反射面,回波信号强,所以仅辐射有限的功率就能保证正常工作[4]。如图1所示,安装在载体上的雷达向前下方地面发射一条较窄波束的电磁波,下视角为γ0、信号频率为f0;弹速在天线波束方向的速度投影V与地速Vx存在如下投影关系:
Vx=V/cosγ0
电磁波打到地面上并漫反射到天线成为回波信号。由于多普勒效应,接收信号的频率发生变化,接收频率和发射频率之间存在的频差,即多普勒频率:
fd=2Vλcosγ0
可见,当λ和γ0确定后,fd与V成正比。多普勒测速仪就是通过测量多普勒频率来获得飞行器的速度信息。
按照波束配置, 多普勒测速仪分为单波束、双波束、三波束、四波束测速仪[5-6]。由于单波束多普勒雷达存在由垂直速度引起的误差严重的缺点, 因而在实践中并未得到使用。实践中广泛使用的是能消除上述缺点的双波束、三波束、四波束多普勒测速仪。因而通过设置多波束,可以得到雷达载体速度矢量的各个分量,即沿着航向的纵向速度、与航向垂直的横向速度和垂直速度。典型四波束配置方法如图2所示。
fd1=2λ(Vxcosα1sinβ1-Vycosβ1-Vzsinα1sinβ1)
fd2=2λ(Vxcosα2sinβ2-Vycosβ2Vzsinα2sinβ2)
fd3=2λ(-Vxcosα3sinβ3-Vycosβ3-Vzsinα3sinβ3)
fd4=2λ(-Vxcosα4sinβ4-Vycosβ4+Vzsinα4sinβ4)
实际产品中可设置四个波束的αi和βi均相等,记为α0和β0。简化利用上面4个算式中的3个,求解飞行器的三维速度:
Vx=λ4cosα0sinβ0(fd1-fd3)
Vz=λ4sinα0sinβ0(fd4-fd3)
Vy=-λ4cosβ0(fd1+fd4)
其中,第四个波束可以用于二次检验测量结果的准确性,也可以不用[5]。
2 弹载雷达辅助测速的可行性
弹上制导雷达通常采用伺服平台或数字捷联去耦的方式隔离弹体运动对波束指向的影响。类似地,多普勒测速仪的天线在飞行器上也有两种安装方式。一种是天线固定安装在飞行器上不能转动,在解算飞行器三维速度时,引入飞行器的姿态信息(俯仰角、滚转角、航向角等),运算较复杂[6-7]。另一种是天线依靠伺服平台在俯仰或滚转方向上稳定,隔离载体姿态信息。同时,制导雷达和多普勒测速仪在信号生成、发射、接收、处理等环节存在极大的相似性。制导雷达增加多普勒测速功能的可行性,表现在如下几个方面:
(1) 可以利用制导雷达本身的二维稳定平台,实现测速雷达天线的稳定,避免解算速度时引入飞行器姿态信息而增加算法复杂度和解算误差。
(2) 復用制导雷达的频率源、发射电路、天线等功能,采用脉冲工作方式,实现多普勒测速。需要增加相应的专用天线、接收通道和信号处理板,给出三维速度测量结果。
(3) 复用制导雷达天线,可采取的方案包括同向双天线方案实现侧向速度的测量、“X”型布局三天线方案实现三维速度测量、“T”型布局三天线方案实现三维速度测量。
制导雷达复合多普勒测速功能,也给系统方案的选取提出了一些限制条件:
(1) 制导雷达采用机扫天线,与增加的测速雷达一起放置于二维稳定平台上,实现高精度速度测量;同时由于要持续测速,雷达散热问题决定了不宜采用相控阵天线体制或需要特定的散热措施。
(2) 考虑到新增的辅助天线难以做到制导雷达天线那么大的尺寸,制导雷达天线采用4分区, 信号处理采用数字和差方式,保证测速模式下能够只使用导引雷达天线的一个分区参与测速。这种设计给天线馈电网络的设计增加了一定难度, 需要4个分区单独配置功率放大器。
(3) 由于硬件复用,在弹道中段需要制导雷达工作时(如SAR匹配导航),多普勒测速功能暂停;二者需要实现分时工作。
3 弹载雷达辅助测速方案
利用制导雷达完成地速测量,需要对天线布局方式和波束参数、波形参数、射频组件、信号处理方式进行专门设计。
3.1 天线布局设计
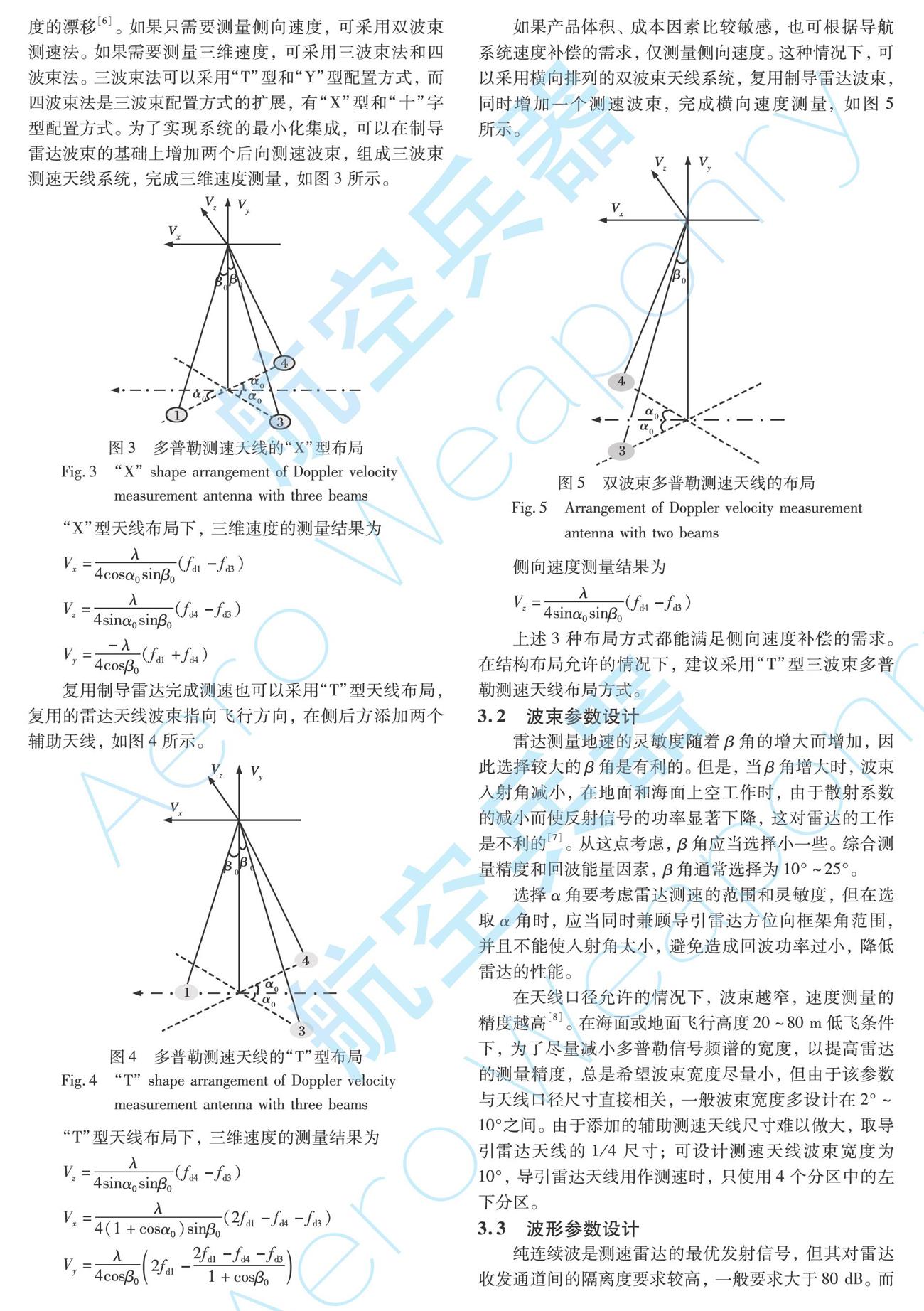
通常长航时精确导航面临的最大挑战是惯导侧向速度的漂移[6]。如果只需要测量侧向速度,可采用双波束测速法。如果需要测量三维速度,可采用三波束法和四波束法。三波束法可以采用“T”型和“Y”型配置方式,而四波束法是三波束配置方式的扩展,有“X”型和“十”字型配置方式。为了实现系统的最小化集成,可以在制导雷达波束的基础上增加两个后向测速波束,组成三波束测速天线系统,完成三维速度测量,如图3所示。
“X”型天线布局下,三维速度的测量结果为
Vx=λ4cosα0sinβ0(fd1-fd3)
Vz=λ4sinα0sinβ0(fd4-fd3)
Vy=-λ4cosβ0(fd1+fd4)
复用制导雷达完成测速也可以采用“T”型天线布局,复用的雷达天线波束指向飞行方向,在侧后方添加两个辅助天线,如图4所示。
“T”型天线布局下,三维速度的测量结果为
Vz=λ4sinα0sinβ0(fd4-fd3)
Vx=λ4(1+cosα0)sinβ0(2fd1-fd4-fd3)
Vy=λ4cosβ02fd1-2fd1-fd4-fd31+cosβ0
如果产品体积、成本因素比较敏感,也可根据导航系统速度补偿的需求,仅测量侧向速度。这种情况下,可以采用横向排列的双波束天线系统,复用制导雷达波束,同时增加一个测速波束,完成横向速度测量,如图5所示。
侧向速度测量结果为
Vz=λ4sinα0sinβ0(fd4-fd3)
上述3种布局方式都能满足侧向速度补偿的需求。在结构布局允许的情况下,建议采用“T”型三波束多普勒测速天线布局方式。
3.2 波束参数设计
雷达测量地速的灵敏度随着β角的增大而增加,因此选择较大的β角是有利的。但是,当β角增大时,波束入射角减小,在地面和海面上空工作时,由于散射系数的减小而使反射信号的功率显著下降,这对雷达的工作是不利的[7]。从这点考虑,β角应当选择小一些。综合测量精度和回波能量因素,β角通常选择为10°~25°。
选择α角要考虑雷达测速的范围和灵敏度,但在选取α角時,应当同时兼顾导引雷达方位向框架角范围,并且不能使入射角太小,避免造成回波功率过小,降低雷达的性能。
在天线口径允许的情况下,波束越窄,速度测量的精度越高[8]。在海面或地面飞行高度20~80 m低飞条件下,为了尽量减小多普勒信号频谱的宽度,以提高雷达的测量精度,总是希望波束宽度尽量小,但由于该参数与天线口径尺寸直接相关,一般波束宽度多设计在2°~10°之间。由于添加的辅助测速天线尺寸难以做大,取导引雷达天线的1/4尺寸;可设计测速天线波束宽度为10°,导引雷达天线用作测速时,只使用4个分区中的左下分区。
3.3 波形参数设计
纯连续波是测速雷达的最优发射信号,但其对雷达收发通道间的隔离度要求较高,一般要求大于80 dB。而雷达的收发隔离度,不仅取决于射频前端收发通道的密封性和发射信号沿本振通道的泄漏量,还取决于发射天线和接收天线之间的隔离度,很难做到80 dB。
为了克服这个缺点,同时适应导引雷达的脉冲工作方式,选取脉冲调制信号进行测速。其射频信号的发射和接收分时进行,即对外发射时不接收,接收回波时不发射,有效克服了纯连续波发射信号泄露强的缺点,其收发隔离度可以做得很高,因此,雷达系统收发通道的隔离度只要大于40 dB就足够。但是该信号存在占空系数,相比连续波信号功率利用率低,同时在飞行高度方面存在高度下限问题。对于50 m飞行高度的要求,可设计脉冲宽度300 ns,脉冲重复频率80~100 kHz。
3.4 射频收发设计
发射电路和频率源复用导引雷达的发射电路和频率源,在测速工作模式下,信号处理机发出模式控制指令,发射电路进入小功率测速模式[9-10]。信号处理机产生的测速基带波形(或不产生脉内调制信号,仅产生300 ns脉宽的发射调制信号),送往射频发射电路,经混频放大后,通过耦合方式将500 mW的发射激励信号同时送往3路天线辐射出去。
脉冲接收期间,3路天线接收到的回波信号通过接收组件放大、下变频,变为10 MHz中频信号后,送往测速信号处理板完成信号采样。发射接收组件的组成原理如图6所示。
3.5 信号处理设计
为了不影响制导雷达的性能,避免出现逻辑切换可靠性问题和增加软件实现难度,测速雷达的功能通过独立的信号处理板完成。
如图7所示,信号处理机对射频收发组件送来的3路中频信号进行采样和预处理,按照信号处理算法进行速度解算,并通过串口通信将测速结果发送给导引雷达信号处理机,统一上报给平台综控机,完成飞行平台速度的补偿[11]。
信号处理过程包括模数转换、数字正交下变频、低通滤波、信号抽取、噪声抑制、多普勒频率估计、信噪比计算、载机速度解算等主要功能模块。对数字中频接收机输出的数字信号进行数据抽取,然后通过频域加窗抑制噪声影响;对抑制噪声后的数据进行运算,提取多普勒频谱;通过细化分析估计多普勒频率,统计噪声功率,实时计算信噪比,通过多个波束获得的多普勒频率,按照测速公式解算载体速度。随后,将计算结果输出到控制及接口模块。
4 测速误差分析
以“T”型天线布局为例,分析多普勒测速误差,其组成包括发射频率准确度、空气中传播速度变化、电路时钟频率偏差、接收通路群延迟、地面快速起伏等因素带来的误差。
4.1 晶振频率准确度的影响
射频信号的频率准确度与晶振受到温度、电压等因素的影响有关,因此,射频发射信号的频率是存在短期和长期变化的[12]。由频率准确度影响的测速误差计算公式为短期频率变化范围占晶振额定频率的百分比,即
Ev1 = δf j ×fj fj ×100%
假设弹载雷达工作于Ku波段,恒温晶振的输出频率为105 MHz,若其短期频率变化范围为105±(20×10-6)MHz,则由于频率变化带来的测速误差上限为0.002%。
4.2 电路时钟的影响
信号处理过程中,电路时钟的不稳定会带来测速误差,其计算公式为频率偏差值δft 与电路时钟ft的比值,即
Ev2 = δft ft ×100%
对100 MHz电路时钟来说,若偏差为400 Hz,带来的测速误差为0.000 4%。
4.3 空气介质的影响
与真空环境不同,电磁波在空气中的实际传播速度随着空气密度、湿度、成分组成等因素变化,表现在不同的气候条件下,单位长度中半波长的个数不同,从而对测速产生影响。计算公式为空气中电磁波传播速度的最大变化值δv与真空中光速c的比值,即
Ev3=δvc×100%
假设空气中,电磁波传播速度的最大变化值δv为75 km/s, 则对测速误差的贡献为0.025%。
4.4 接收通路群延迟的影响
接收信号经过限幅器、放大器、衰减器和滤波器等射频器件,相位会发生微小改变,测速过程中根据多普勒频率的不同,相当于接收信号通过各级射频器件的频率是在变化的。由此所造成的测量误差经验值为Ev4=0.02%。
4.5 地面快速起伏的影响
发射信号照射到高低起伏的地面,如果左右波束照射的地面起伏差别比较大,会带来视线方向多普勒测量的起伏,直接影响侧向速度测量误差[13-15]。其计算公式为地面起伏带来的波束方向径向距离变化率δr与波束视线方向径向速度V的比值,即
Ev5=δrV×100%
假设载体低空飞行,平坦地面条件下波束径向速度为200 m/s, 波束视线径向距离为80 m,地面起伏带来的左右波束径向距离变化率为0.4 m/s,则地面起伏带来的测速误差为0.2%。
可见,对测速误差影响最大的因素来自产品外部,即载体飞行经过的地面快速起伏程度。对80 kHz以上的脉冲重复频率,其相邻脉冲回波中由于地面起伏带来的多普勒相差不会很大,但脉组间可能存在较大的多普勒跳跃,需要用多帧滤波的方式加以抑制。
上述5个测速误差因素的实际影响效果与各个系统的雷达参数、飞行参数的具体取值有关。误差分析中的取值为巡航飞行条件下弹载雷达系统的典型值。在该条件下,“T”型天线布局的测速误差为
Ev=E2v1+E2v2+E2v3+E2v4+E2v5=0.203%
假设长航时飞行器或导弹的飞行速度和侧向速度为330 m/s和30 m/s,则两个方向的测速误差分别为0.67 m/s和0.06 m/s,对于航路纠偏,尤其是侧向误差的校正具有足够精度,能够满足应用需求。
5 结 论
制导雷达和多普勒測速仪在天线形式以及信号发射、接收、处理等环节具有很多相似性,决定了在长航时空面导弹上对其进行功能整合的必要性和可行性。本文利用制导雷达进行地速辅助测量,完成了原理分析和方案设计,并对测速误差进行了分析。结果表明,复用弹载制导雷达进行载体地速的辅助测量,能够满足载体导航速度修正的需求,提高了设备集成度。另外,地势起伏等因素带来的测速误差不容忽视,误差指标能否满足特定飞行过程精确导航的需求,还需要根据具体应用环境进行分析。
参考文献:
[1] 樊会涛, 张蓬蓬. 空空导弹面临的挑战[J]. 航空兵器, 2017(2): 3-7.
Fan Huitao, Zhang Pengpeng. The Challenges for Air-to-Air Missile[J]. Aero Weaponry, 2017(2): 3-7. (in Chinese)
[2] 秦瑞, 王顺伟, 袁晓峰, 等. 多普勒测速仪/捷联惯导组合导航技术研究[J]. 战术导弹技术, 2006(6): 68-72.
Qin Rui, Wang Shunwei, Yuan Xiaofeng, et al. Study of Integrated Navigation of Strap-Down Inertial Navigation Aided by DVL[J]. Tactical Missile Technology, 2006(6): 68-72. (in Chinese)
[3] 孙志强. 基于MEMS/陆用多普勒测速仪组合的高精度陆用多普勒测速仪系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
Sun Zhiqiang. Research on High-Precision Land Doppler Velocimetry Based on MEMS/Land Doppler Velocimetry[D]. Harbin: Harbin Engineering University, 2013. (in Chinese)
[4] 赵毅寰, 王嵛琦, 全英汇. 弹载毫米波SAR多普勒调频率估计方法[J]. 航空兵器, 2012(5): 24-26.
Zhao Yihuan, Wang Yuqi, Quan Yinghui. Doppler Rate Estimation for Millimetre-Wave Missile-Borne SAR[J]. Aero Weaponry, 2012(5): 24-26. (in Chinese)
[5] 康志伟, 徐星满, 刘劲, 等. 基于双测量模型的多普勒测速及其组合导航[J]. 宇航学报, 2017, 38(9): 964-970.
Kang Zhiwei, Xu Xingman, Liu Jin, et al. Doppler Velocity Mea-surement Based on Double Measurement Model and Its Integrated Navigation[J]. Journal of Astronautics, 2017, 38(9): 964-970. (in Chinese)
[6] 孙超. 脉冲多普勒雷达测速关键问题研究[D]. 西安: 西安电子科技大学, 2014.
Sun Chao. Research on Key Issue of Velocity Measurement in Pulse Doppler Radar System[D]. Xian: Xidian University, 2014. (in Chinese)
[7] 李宏伟. 雷达测速传感器及其测试系统研究[D]. 武汉: 华中科技大学, 2013.
Li Hongwei. Research on Radar Speed Measurement Sensor and Its Test System[D]. Wuhan: Huazhong University of Science and Technology, 2013. (in Chinese)
[8] 邢晓晴, 陆威, 庄子波. 基于最大似然估计的相干多普勒雷达信号处理[J]. 中国民航大学学报, 2018, 36(2): 6-10.
Xing Xiaoqing, Lu Wei, Zhuang Zibo. Coherent Doppler Lidar Signal Processing Based on Maximum Likelihood Estimation[J]. Journal of Civil Aviation University of China, 2018, 36(2): 6-10. (in Chinese)
[9] 高鹏鹏, 姚金杰. 多普勒雷达的微波上变频模块设计[J]. 国外电子测量技术, 2018, 37(2): 16-20.
Gao Pengpeng, Yao Jinjie. Design of Microwave Upconversion Module for Doppler Radar[J]. Foreign Electronic Measurement Technology, 2018, 37(2): 16-20. (in Chinese)
[10] 孟乔波, 姚金杰. 一种8 mm模块化测速雷达前端的设计[J]. 国外电子测量技术, 2018, 37(12): 76-80.
Meng Qiaobo, Yao Jinjie. Design of a 8 mm Modular Speed-Mea-suring Radar Front-End[J]. Foreign Electronic Measurement Technology, 2018, 37(12): 76-80. (in Chinese)
[11] 李錦明, 张虎威, 高文刚, 等. 基于FPGA的多普勒雷达测速系统设计[J]. 电子器件, 2017, 40(6): 1408-1413.
Li Jinming, Zhang Huwei, Gao Wengang, et al. Design of Doppler Radar Speed Measurement System Based on FPGA[J]. Chinese Journal of Electron Devices, 2017, 40(6): 1408-1413. (in Chinese)
[12] 杨博, 梁允峰, 孟联文, 等. 频率源对雷达测速精度影响分析[J]. 宇航学报, 2018, 39(3): 318-325.
Yang Bo, Liang Yunfeng, Meng Lianwen, et al. Analysis of the Effects of Frequency Source on the Velocity Measuring Precision of Radar[J]. Journal of Astronautics, 2018, 39(3): 318-325. (in Chinese)
[13] 杨海东, 白书华. 一种提高多普勒测速仪测频精度的方法[J]. 声学技术, 2017, 36(6): 539-544.
Yang Haidong, Bai Shuhua. A Method to Improve the Frequency Measurement Accuracy of Doppler Velocity Log[J]. Technical Acoustics, 2017, 36(6): 539-544. (in Chinese)
[14] 李雪松. 卡尔曼滤波在多普勒测速中的应用研究[D]. 哈尔滨: 哈尔滨工程大学, 2019.
Li Xuesong. Application Research of Kalman Filter in Doppler Velocity Measurement[D]. Harbin: Harbin Engineering University, 2019. (in Chinese)
[15] 李万里. 惯性/多普勒组合导航回溯算法研究[D]. 长沙: 国防科学技术大学, 2013.
Li Wanli. INS/DVL Integrated Navigation by Using Backtracking Scheme[D]. Changsha: National University of Defense Technology, 2013. (in Chinese)
A Scheme of Ground Velocity Measurement
Assisted by Missile-Borne Radar
Zhao Yihuan1, 2*, Yin Jianyong1 , Yang Hongqiao1, Chen Wei3,Liao Huashan4
(1.Space Star Technology Co., Ltd, Beijing 100086, China;
2.State Key Laboratory of Information
Technology for Integration of Heaven and Earth, Beijing 100086, China;
3.Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons, Luoyang 471009, China;
4. The 29th Research Institute of CETC, Chengdu 610036, China)
Abstract: In order to solve the problem of precise navigation of long endurance missile when satellite signal is unavailable, an integrated scheme for ground velocity measurement of carrier by using missile-borne guidance radar is proposed. The calculation methods of three-dimensional ground velocity measurement with "X" and "T" antenna layout are deduced. The antenna beam parameters, waveform parameters, RF components and signal processing architecture are designed. The measurement error of the system is analyzed. The results show that the auxiliary measurement of carrier ground velocity can meet the needs of carrier navigation velocity correction and improve the equipment integration.
Key words: navigation; Doppler test; guidance radar; velocity correction; velocity measurement
收稿日期:2020-06-29
基金項目:国防科技创新特区基金项目
作者简介:赵毅寰(1982-),男,河南南阳人,博士,研究员,研究方向是雷达系统设计、雷达抗干扰技术、雷达成像技术等。
