抛接定向越肩发射方案与控制技术研究
2021-08-23金一欢武宏程余志凯冯昊王蕾
金一欢 武宏程 余志凯 冯昊 王蕾

摘 要: 为提高具有直接侧向力装置的空空导弹越肩发射转弯能力,本文提出了一种新型转弯方案——抛接定向。首先分析了现有转弯方案的不足,提出抛接定向方案,并给出具体实施流程。之后针对抛接定向方案中的姿态控制问题,引入控制量反馈,基于相平面设计符合直接侧向力装置特性的控制律,并给出渐进稳定性证明。数字仿真结果表明所设计越肩方案能够有效提高空空导弹转弯性能。
关键词:越肩发射;直接侧向力;抛接定向;Bang-bang控制;相平面法
中图分类号:TJ765 文献标识码: A 文章编号:1673-5048(2021)03-0059-06
0 引 言
在战斗机性能不断升级的背景下,未来空战对空空导弹机动能力、响应速度、全方位攻击能力的要求越来越高[1]。越肩发射(Over-the-Shoulder Launch, OTS)是实现导弹全向攻击的重要方式,分为后射和前射两种方式[2]:后射是导弹利用旋转发射架在发射前将导弹转向,直接向后发射[3-4],如俄罗斯的R-73R;前射是导弹向前发射,转弯后攻击后方目标。具备前射越肩能力的导弹既可攻击前半球目标,又兼顾后半球防卫。目前,主流第四代格斗導弹都为前射方式,如美国AIM-9X[5]。越肩发射对导弹大攻角飞行时强干扰强耦合环境下的姿态控制、最优弹道指令快速生成、数据链通信等方面提出很高需求。
大攻角飞行过程中,气动力具有强不确定性,气动舵效甚至会发生反效的情况。直接侧向力控制技术(Lateral Thrust Control, LTC)在近20年内得到了广泛研究,给越肩发射的大机动转弯提供了可能[6-11]。直接侧向力控制不依赖于主发动机,具有可操纵性不受飞行状态影响的优点。
常规方案下的越肩发射方式主要利用大攻角产生的法向力来完成转弯,存在转弯时间长、能量损失大的缺点。传统转弯方式完成180°转弯,需要5 s左右,这段时间中导弹需要载机的指引完成目标搜索和导引头截获,极大影响了载机在战场的生存能力。
直接侧向力装置具有开关特性,对于直接侧向力控制,目前一般是两种思路,一是先设计连续的控制律再通过PWM等调制技术获得离散的控制量[11-13],二是利用具有离散特性的控制律如滑模变结构控制直接设计开关量[10, 14]。连续控制量离散化过程中控制性能会出现损失;传统滑模变结构控制的离散特性会带来抖振现象,较难满足直接力装置的工程应用需求。
本文以使用直接侧向力装置的空空导弹为研究对象,针对越肩发射转弯问题,提出空空导弹抛接定向(Tossing-Orientation)越肩发射方案。针对直接侧向力控制问题,基于相平面提出混合Bang-bang控制律设计方案。此方案工程应用性较强,能够适应执行机构的实际特性。最后通过数字仿真验证所设计方案的有效性。
1 抛接定向越肩方案设计
目前空空导弹发射后的快速转弯段受可用攻角限制,姿态角变化受限于速度方向的变化。速度方向变化率可由弹道倾角的变化率表征,计算公式为
θ·=Psinα+Y-mgcosθmv(1)
式中:P为发动机推力;Y为气动升力;α为攻角;v为导弹速度;m为弹体质量;θ为弹道倾角。
弹道倾角变化率与导弹推力、 升力和速度等因素有
关。在发动机推力一定时,弹道倾角变化率随马赫数和攻角的变化规律如图1所示。从图中可以看出,弹道倾角变化率的主要因素仍是攻角,随攻角的增大而增大。马赫数对弹道倾角的变化率影响较小。
传统越肩发射方案由于最大可用攻角限制,攻角保持在60°~70°左右,最大的转弯能力约40(°)/s,完成180°的越肩发射至少需要约4.5~5 s。该方式完成姿态转弯和速度转弯耗时较长,转弯半径较大。
考虑到直接侧向力装置不受攻角大小的影响,可在发动机点火前迅速调整姿态角,再进行导弹加速。该方式可在低速下以更小的过载需求实现速度方向的快速改变。本文提出一种基于抛接控制的越肩发射方案,采用直接侧向力,迅速改变姿态,具有转弯半径小、转弯时间短、发动机燃料消耗少的优点。
基于以上分析,提出抛接定向越肩转弯方案,如图 2所示。首先,“抛”是指利用导弹本身的静不稳定性和直接侧向力,使得导引头指向由前向迅速转为后向,此时只控制导弹姿态,不对弹道进行控制,相当于导弹被载机以一定初始速度向外抛射;之后,导弹主发动机点火,使得导弹速度反向,弹道发生改变,相当于空中接力,这个阶段称为“接”;在导引头指向预定方位之后直至转弯过程结束,导弹始终需要进行姿态稳定控制,保持导引头指向稳定,这个过程称为“定向”。具体而言,抛接定向的实施流程如下:
(1) 载机后视雷达探测到目标当前方位,并将姿态角指令装订至弹上计算机;
(2) 导弹从发射架上脱离,立即开启直接侧向力装置,使得导弹姿态角转过一定角度,导引头指向弹上装订的目标方位;
(3) 保持导引头指向不变,主发动机点火;
(4) 当速度转向后且攻角小于一定值时,导引头开机,切入气动舵控制;
(5) 进入末制导。
从抛接定向的实施流程可知,它不同于现有的研究成果,如文献[15-17]中通过弹道优化+俯仰角指令来实现转弯过程,抛接定向方案并没有规划转弯弹道,也不关心转弯过程中每一时刻的导弹位置,而是将转弯问题转化为时序上的点火和姿态控制问题:点火前的姿态调整、点火后的姿态稳定、控制切换。传统方案由于可用攻角的约束,姿态的改变不能太剧烈; 抛接定向方案由于无攻角限制,可以迅速将姿态调整到位,速度方向则依靠主推力分量和气动力提供的法向过载改变,因此,该方案转弯半径小、转弯时间短、发动机燃料消耗少。由于该方案姿态到位所需时间少,考虑尾追目标距离载机5 km,弹体姿态转弯到位需要1.5 s,则15g法向机动逃逸情况下,视线角偏差为±2°左右,小于红外导引头视场角范围一个数量级(AIM-9X最大视场角为90°)。故可考虑尾追目标直线飞行设计转弯到位角,姿态到位后即可打开导引头搜索捕获目标,不需要载机指引,提高了载机的战场生存能力。
2 基于直接侧向力的数学模型
本文将直接侧向力装置作为执行机构。装备直接力装置的导弹示意图如图3所示,图中l为直接侧向力作用力臂,直接力装置阀门可开关控制。俯仰方向设置2个直接力喷管3和6,控制弹体俯仰。4个小推力喷管(1, 2, 4, 5)稳定弹体的偏航和滚转通道。由于俯仰通道为转弯控制通道,所受干扰最大,其他通道控制律设计一致,故本文仅研究俯仰通道的控制技术。
根据导弹动力学公式[18],可获得导弹俯仰通道动力学模型如下:
ω·z=MzJz+(Jx-Jy)ωxωyJz
Mz=Mza+Mzt
Mzt=Ty·l·uy
·=ωz(2)
式中:, ωz, ωx, ωy为俯仰角、俯仰角速度、滚转角速度和偏航角速度;Mza, Mzt分别为气动力矩和直接力控制力矩在弹体系z1轴方向分量;Ty为喷管3和6产生的直接力;l为直接力作用力臂;Jx, Jy, Jz分别为弹体绕x1, y1, z1轴的转动惯量;uy∈-1, 0, 1为俯仰通道开关输入。
抛接转弯过程中,转弯指令以俯仰角指令形式给出,控制系统设计的目的为控制弹体姿态跟踪俯仰角指令。根据式(2)可得
ω·z=MzaJz+Δ+Ty·l·uyJz
·=ωz(3)
式中:Δ为干扰误差,如通道间耦合、弹体参数误差等。
俯仰角指令以c的形式给出,令e=-c。为使跟踪误差e收敛至0,借鉴PD控制的思想引入e的导数e·。令x1=e, x2=e·,得到以下双积分系统:
x·1=x2
x·2=a+buy-¨c(4)
其中: a=MzaJz+Δ; b=Ty·lJz; ¨c几乎为0,可视为外部干扰。由此得到简化后的双积分系统如下:
x·1=x2
x·2=a+buy(5)
式中: uy∈{-1, 1, 0}。
3 基于相平面法的控制律設计
3.1 混合Bang-bang控制律设计
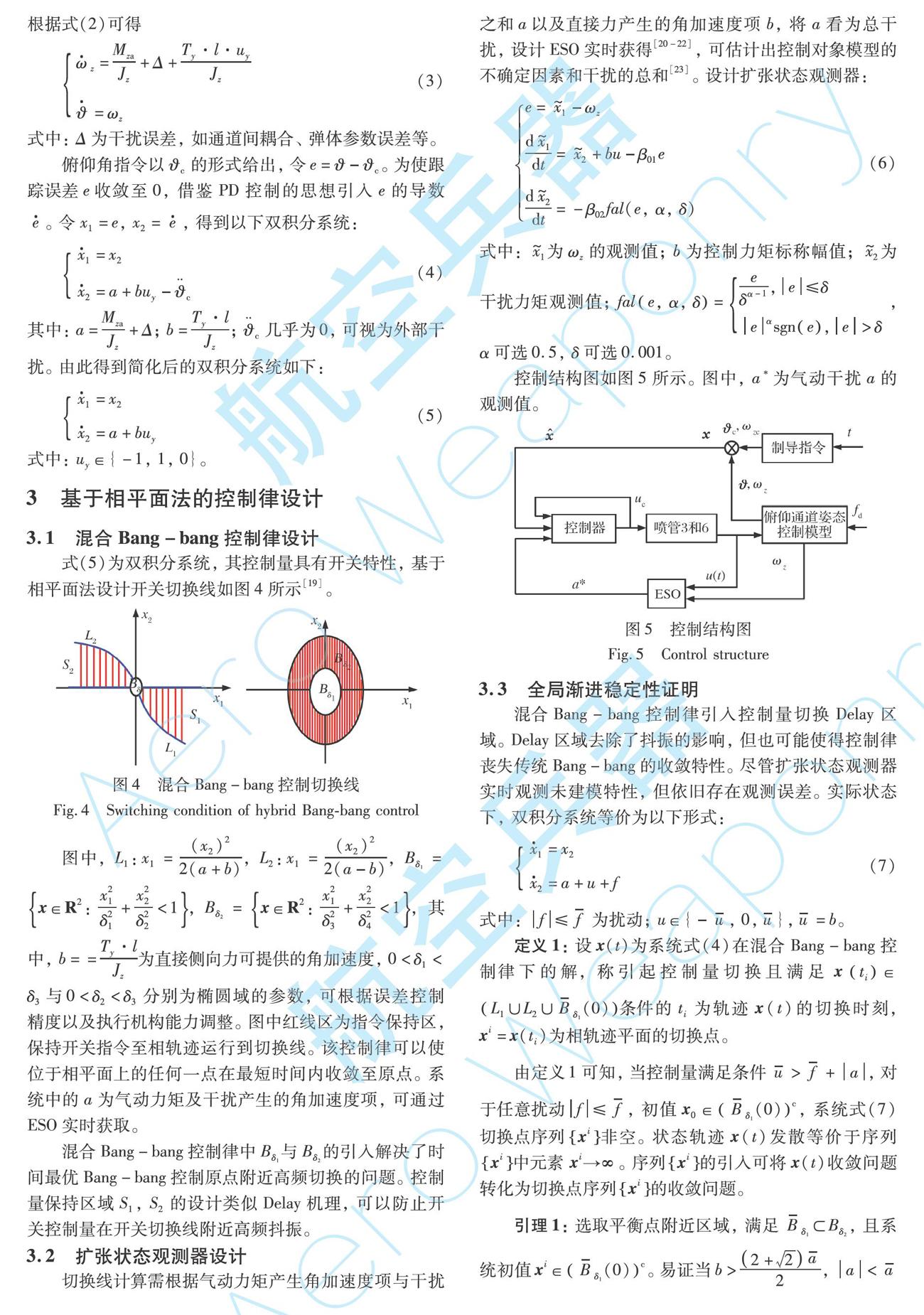
式(5)为双积分系统,其控制量具有开关特性,基于相平面法设计开关切换线如图4所示[19]。
图中, L1:x1=(x2)22(a+b),L2:x1=(x2)22(a-b), Bδ1=x∈R2: x21δ21+x22δ22<1, Bδ2=x∈R2: x21δ23+x22δ24<1, 其中,b==Ty·lJz为直接侧向力可提供的角加速度,
0<δ1<δ3与0<δ2<δ3分别为椭圆域的参数,可根据误差控制精度以及执行机构能力调整。图中红线区为指令保持区,保持开关指令至相轨迹运行到切换线。该控制律可以使位于相平面上的任何一点在最短时间内收敛至原点。系统中的a为气动力矩及干扰产生的角加速度项,可通过ESO实时获取。
混合Bang-bang控制律中Bδ1与Bδ2的引入解决了时间最优Bang-bang控制原点附近高频切换的问题。控制量保持区域S1, S2的设计类似Delay机理,可以防止开关控制量在开关切换线附近高频抖振。
3.2 扩张状态观测器设计
切换线计算需根据气动力矩产生角加速度项与干扰之和a以及直接力产生的角加速度项b,将a看为总干扰,设计ESO实时获得[20-22],可估计出控制对象模型的不确定因素和干扰的总和[23]。设计扩张状态观测器:
e=x~1-ωz
dx~1dt=x~2+bu-β01e
dx~2dt=-β02fal(e, α, δ)(6)
式中: x~1为ωz的观测值;b为控制力矩标称幅值;x~2为干扰力矩观测值;
fale, α, δ=eδα-1,e≤δ
eαsgne,e>δ ,
α可选0.5,δ可选0.001。
控制结构图如图5所示。图中,a*为气动干扰a的观测值。
3.3 全局渐进稳定性证明
混合Bang-bang控制律引入控制量切换Delay区域。Delay区域去除了抖振的影响,但也可能使得控制律丧失传统Bang-bang的收敛特性。尽管扩张状态观测器实时观测未建模特性,但依旧存在观测误差。实际状态下,双积分系统等价为以下形式:
x·1=x2
x·2=a+u+f(7)
式中: f≤f-为扰动;u∈{-u-, 0,u-},u-=b。
定义1:设x(t)为系统式(4)在混合Bang-bang控制律下的解,称引起控制量切换且满足xti∈L1∪L2∪B-δ1(0)条件的ti为轨迹x(t)的切换时刻,xi=x(ti)为相轨迹平面的切换点。
由定义1可知,当控制量满足条件u->f-+a,对于任意扰动f≤f-,初值x0∈B-δ1(0)c,系统式(7)切换点序列xi非空。状态轨迹x(t)发散等价于序列xi中元素 xi→∞。序列xi的引入可将x(t)收敛问题转化为切换点序列xi的收敛问题。
引理1: 选取平衡点附近区域,满足B-δ1Bδ2,且系统初值xi∈B-δ1(0)c。易证当b>2+2a-2,a
引理2: 当控制量满足引理1要求时,对于任意点p1∈L1p2∈L2,p1=p2存在正不變集P。状态初值x0=p1时,x(t)∈P,t>0。
不变集P如图6所示。状态从p1∈L1p2∈L2,p1=p2点出发,可达区域P+P-由极值弧以及开关切换曲线L2(L1)构成。定义P=P+∪P-,平衡点0∈P。状态x(t)∈P+只能从开关切换曲线离开区域P+。同理,状态x(t)∈P-只能从开关切换曲线离开区域P-。如选择0∈Bδ1(0)B-δ2(0)intP,则P为系统的正不变集。
根据引理1可知,当b>2+2a-2,a
4 数字仿真验证
为了验证上述越肩方案以及控制律设计的有效性,对所设计内容进行数字仿真。数字仿真主要参数见表1。为防止误伤载机,数字仿真中使导弹在水平面内完成越肩转弯。
仿真结果如图7~14所示,其中方案1为抛接定向越肩方案,方案2为传统越肩方案,两种方案皆在水平面内完成弹道偏角180°转弯。由图7可知,喷管控制量未出现高频切换,俯仰通道控制量长时间位于死区。图 8设计的ESO能够较好地观测出转弯过程中气动干扰力矩的变化情况,为控制律提供干扰补偿,提高控制律的鲁棒性。
由图9可知,方案1条件下偏航角在0.715 s内达到180°,在此条件下导引头可以迅速开机直接捕获载机身后目标;方案2条件下偏航角2.82 s首次达到180°左右,此时由于速度矢量还没转过来,需继续增大偏航角。对比合成攻角曲线可见,在4.4 s左右导弹速度矢量完成转弯。方案1能够极大地缩短转弯时间,提高载机的生存概率。
由图10可知,方案2整个转弯过程中攻角始终维持在70°左右的大攻角状态;相比而言,抛接方案中攻角大部分时间维持在超大攻角以及小攻角状态,所需控制量更加少,转弯过程所受升力较小导致转弯半径小。
图11中,方案1转弯半径约37.5 m,小于方案2转弯半径319.0 m,有利于攻击侧后方目标,减少导引头捕获目标的时间,改善初末制导交班条件。
x, z为导弹发射坐标系下坐标,取飞行方向x轴为正方向,y轴垂直向上,利用右手螺旋定则确定z轴。
图13~14中,方案1为偏航角到位时点火加速;方案2为弹机分离0.4 s后点火。由速度曲线可见,方案1达到方案2转弯完成状态时间约为3.59 s,转弯时间减少1 s左右,完成转弯状态时方案1比方案2总冲使用少约42 940 N·s(1.13 s×38 000 N)。方案1比方案2总冲消耗更加少,有利于提高射程。相同转弯时间时,方案1总冲比方案2少约12 000 N·s(0.3 s×40 000 N),末速为方案2的1.66倍,具有更强的机动能力。
由仿真结果可见,所设计控制律能够稳定控制导弹完成越肩转弯。对比两种不同的转弯方案,所设计抛接方案具有转弯时间短、所需发动机总冲少以及转弯半径小的优点,能够有效提升导弹射程,增加导弹机动能力,更好地适应多任务弹的需求。
5 结 论
针对常规越肩发射存在的问题,本文提出了抛接定向越肩发射转弯方案,并基于方案在相平面内设计了具有离散特性的混合Bang-bang控制律,给出了渐进稳定性证明。数字仿真结果表明,所提出的新型转弯方案具有转弯时间短、所需能量少以及转弯半径小的优点,并且无需设计弹道指令,可以充分发挥直接侧向力控制的优势,能够更好地适应下一代多任务空空导弹的需求。
参考文献:
[1] 任淼,文琳,李双. 2018年国外空空导弹发展动态研究[J]. 航空兵器,2019,26(3): 1-9.
Ren Miao, Wen Lin, Li Shuang. Research on Foreign Air-to-Air Missiles Development in 2018[J]. Aero Weaponry, 2019,26(3): 1-9.(in Chinese)
[2] 高劲松, 陈哨东, 王丕宏. 越肩发射的两种方式[J]. 火力与指挥控制, 1998, 23(4): 10-13.
Gao Jinsong, Chen Shaodong, Wang Pihong. Two Launch Modes of Over the Shoulder[J]. Fire Control & Command Control, 1998, 23(4): 10-13. (in Chinese)
[3] 马登武, 刘琰, 田振华. 空空导弹的越肩发射技术综述[J]. 海军航空工程学院学报, 2007, 22(3): 377-381.
Ma Dengwu, Liu Yan, Tian Zhenhua. Survey on Over the Shoulder of Air-to-Air Missile[J]. Journal of Naval Aeronautical Engineering Institute, 2007, 22(3): 377-381. (in Chinese)
[4] 高劲松, 陈哨东, 朱荣刚, 等.越肩发射的研究现状和发展[J]. 火力与指挥控制, 2005, 30(8): 1-5.
Gao Jinsong, Chen Shaodong, Zhu Ronggang, et al. Development on Over the Shoulder[J]. Fire Control & Command Control, 2005, 30(8): 1-5.(in Chinese)
[5] 李舜, 李佩佩. 先進近距格斗空空导弹实现越肩发射设计分析[J]. 弹箭与制导学报, 2012, 21(6): 37-40.
Li Shun, Li Peipei. The Design and Analysis on Over the Shoulder Advanced Short-Range Air-to-Air Missile[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2012, 21(6): 37-40.(in Chinese)
[6] Taur D R, Chern J S. An Optimal Composite Guidance Strategy for Dogfight Air-to-Air IR Missiles[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit, 1999.
[7] Bugajski D J, Enns D F.Nonlinear Control Law with Application to High Angle-of-Attack Flight[J]. Journal of Guidance, Control, and Dynamics, 1992, 15(3): 761-767.
[8] Hirokawa R, Sato K, Manabe S. Autopilot Design for a Missile with Reaction-Jet Using Coefficient Diagram Method[C]∥AIAA Gui-dance, Navigation, and Control Conference and Exhibit, 2001.
[9] 崔彦凯, 王志刚. 越肩发射空空导弹气动力/推力矢量复合控制器设计[J]. 宇航学报, 2010, 31(4): 1100-1104.
Cui Yankai, Wang Zhigang. Aerodynamic and Thrust Vector Complex Controller Design of Over the Shoulder Air-to-Air Missile[J]. Journal of Astronautics, 2010, 31(4): 1100-1104. (in Chinese)
[10] 王鹏, 陈万春, 殷兴良. 空空导弹大角度姿态反作用喷气控制[J]. 航空学报, 2005, 26(3): 263-267.
Wang Peng, Chen Wanchun, Yin Xingliang. Large Angle Attitude Reaction Jet Control for an Air-to-Air Missile[J]. Acta Aeronautica et Astronautica Sinica, 2005, 26(3): 263-267.(in Chinese)
[11] 陆艳辉,张曙光. 离散RCS的PWPF调制方式改进及混合控制逻辑设计[J]. 航空学报,2012, 33(9):1561-1570.
Lu Yanhui,Zhang Shuguang.An Improvement on PWPF Modulation of Discrete RCS and Design of the Blended Control Logic[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9): 1561-1570.(in Chinese)
[12] 王清, 杨宝庆, 马克茂. 一种优化PWPF调节器在动能拦截器末制导中的应用研究[J]. 宇航学报,2005,26(5):576-580.
Wang Qing, Yang Baoqing, Ma Kemao. PWPF Optimizing Design and Its Application Research to Terminal Guidance of Kenetic Killing Vehicle[J]. Journal of Astronautics, 2005, 26(5): 576-580.(in Chinese)
[13] 马悦悦, 唐胜景, 郭杰, 等. 基于自抗扰与模糊逻辑的大攻角控制系统设计[J]. 系统工程与电子技术,2013,35(8):1711-1716.
Ma Yueyue, Tang Shengjing, Guo Jie, et al. High Angle of Attack Control System Design Based on ADRC and Fuzzy Logic[J]. Systems Engineering and Electronics, 2013, 35(8): 1711-1716.(in Chinese)
[14] 王鹏,陈万春,邹晖, 等. 空空导弹敏捷转弯反作用喷气控制研究[J]. 北京航空航天大学学报,2004, 30(5):395-399.
Wang Peng, Chen Wanchun, Zou Hui, et al. Agile Turn Control Considerations for Air-to-Air Missile with Reaction Jets Control System[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(5): 395-399.(in Chinese)
[15] 闫亮, 马克茂, 董继鹏, 等. 采用直接力的空空导弹越肩发射控制设计[J]. 航空兵器, 2013(6): 1-8.
Yan Liang, Ma Kemao, Dong Jipeng, et al. Design of Over-the-Shoulder Launch Control for Air-to-Air Missiles with Lateral Jets[J]. Aero Weaponry, 2013(6): 1-8.(in Chinese)
[16] 雷震遠, 周军. 空空导弹越肩发射初制导转弯控制与仿真[J]. 火力指挥与控制, 2010, 35(1): 153-155.
Lei Zhenyuan, Zhou Jun. The Control and Simulation of Over the Shoulder of Air-to-Air Missiles Agile Turn[J]. Fire Control & Command Control, 2010, 35(1): 153-155.(in Chinese)
[17] 金一欢,雷叶红,冯昊, 等. 基于虚拟目标的导弹越肩发射初制导轨迹优化[J]. 空间控制技术与应用,2018, 44(3):15-21.
Jin Yihuan, Lei Yehong, Feng Hao, et al. Guidance Law Design for Air-to-Air Missile Over-the-Shoulder Based on Virtual Target[J]. Aerospace Control and Application, 2018, 44(3): 15-21.(in Chinese)
[18] 钱杏芳,林瑞雄,赵亚男. 导弹飞行力学[M]. 北京:北京理工大学出版社,2011: 36-40.
Qian Xingfang, Lin Ruixiong, Zhao Yanan. Aerodynamics of Missile[M]. Beijing: Beijing Institute of Technology Press, 2011: 36-40.(in Chinese)
[19] Serpelloni E,Maggiore M,Damaren C.Bang-bang Hybrid Stabilization of Perturbed Double-Integrators[J]. Automatica,2016,69:315-323.
[20] 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京:国防工业出版社,2008: 158-160.
Han Jingqing.Active Disturbance Rejection Control Technique-The Technique for Estimating and Compensating the Uncertainties[M].Beijing: National Defense Industry Press, 2008: 158-160.(in Chinese)
[21] 孔寒雪,蒋虎超,朱雯雯, 等. 一种旋转导弹锥形运动稳定性分析方法研究[J]. 飞控与探测,2020, 3(1): 56-61.
Kong Hanxue, Jiang Huchao, Zhu Wenwen, et al. Research on a Method of Stability Analysis for Conical Motion of Rotating Missile[J]. Flight Control & Detection, 2020, 3(1): 56-61.(in Chinese)
[22] 郑子元,林俊,孔寒雪, 等. 导弹弹性振动在线辨识及自适应抑制[J]. 飞控与探测,2019, 2(6): 41-47.
Zheng Ziyuan, Lin Jun, Kong Hanxue, et al. Missile Elastic Vibration Identification and Adaptive Suppression[J]. Flight Control & Detection, 2019, 2(6): 41-47.(in Chinese)
[23] 王芳, 宗群, 田栢苓, 等. 再入飞行器带有干扰观测器的有限时间控制[J]. 控制理论与应用, 2016, 33(11): 1527-1534.
Wang Fang, Zong Qun, Tian Bailing, et al. Finite Time Control Design for Re-Entry Hypersonic Vehicle with Disturbance Observer[J]. Control Theory & Applications, 2016, 33(11): 1527-1534.(in Chinese)
Research on Tossing-Orientation Scheme of
Over-the-Shoulder Launch and Control Technology
Jin Yihuan1*,Wu Hongcheng2,Yu Zhikai2, Feng Hao1, Wang Lei1
(1. Shanghai Aerospace Control Technology Institute, Shanghai 201109, China;
2. The First Military Representative Office of Equipment Department of China Air Force in Shanghai, Shanghai 201109, China)
Abstract: Aiming at over-the-shoulder launch implementation for air-to-air missile, which is assured to be equipped with lateral thruster, a novel scheme namely tossing-orientation is proposed. Firstly, disadvantages of existing turning scheme are analyzed briefly, then a novel concept of over-the-shoulder launch scheme called tossing-orientation, as well as its implementation procedure, is put forward. In order to deal with challenge of attitude control in the scheme, a missile autopilot introducing control feedback based on phase plane is designed which can suit the characteristic of the lateral thrust device, and the asymptotically stabilization of the controller is proved. Digital simulation results show that the designed scheme can effectively improve the turning performance of air-to-air missile.
Key words: over-the-shoulder; lateral thrust; tossing-orientation; Bang-bang control; phase plane method
收稿日期:2020-05-13
作者簡介:金一欢(1994-),男,浙江嘉兴人,硕士,研究方向为飞行器控制与仿真。
