无人驾驶技术在矿用电机车的应用研究
2021-08-20吴鑫
吴 鑫
(山西焦煤集团有限责任公司 官地煤矿,山西 太原 030022)
0 引言
在“十三五”规划和《中国制造2025》对于煤炭行业发展方向的论述中,要求将大数据、云计算处理技术运用于煤炭开采科学决策之中,利用互联网和物联网技术实现采煤设备信息融合,将现代顶尖的科技新成果充分应用于煤炭开采的各个环节,建立无人矿山和智慧矿山。电机车无人驾驶是实现无人矿山的重要组成部分,电机车的井下行车环境恶劣,人工驾驶容易出现交通事故,无人驾驶技术把司机从井下繁重的工作中解放出来,配合科学决策车辆调度技术能够降低机车的空载率,在运输效率和安全性上具有明显的优势,因此研究无人驾驶技术在矿用电机车的应用具有现实意义。
1 井下通信网络技术
在无人驾驶系统的运行过程中,电机车需要向基站实时上传海量高清视频,并随着行驶过程切换基站。为了提高通信效率,一个基站应当具备同时接收多辆机车网络信号的能力。基于系统要求,电机车无人驾驶系统通信网络应具备高带宽、无线接入和无线切换的特点。考虑到井下环境的特殊性以及无线信号在巷道内壁反射的现象,通信网络设备应具有足够的抗干扰、抗故障性能,采取相应措施防止发生多径干扰现象。
如图1所示,矿井电机车无人驾驶系统通信网络由监控中心运输调度网、光纤骨干网和系统终端移动接入网组成。监控中心运输调度网的设备包括遥控操作台、视频服务器、调度服务器和机车运行服务器。在遥控操作台上,电机车司机通过计算机屏幕观察井下机车状态、位置和视距视频等信息,操作电机车远程驾驶设备实现半自动遥控驾驶;视频服务器接收运输路线上安装的摄像头数据用于路况监视;调度服务器接收电机车位置信息用于机车调度;机车运行服务器接收电机车运动控制数据用于电机车状态检测。光纤骨干网由光纤交换机、核心交换机和光纤组成,核心交换机将通信基站接收的无线信号转换为有线信号,传输给井下光纤骨干网。系统终端移动接入网由通信基站和车载控制器的无线收发器组成,车载控制器通过水平极化天线发送(或接收)机车数据(或监控中心的控制指令)。
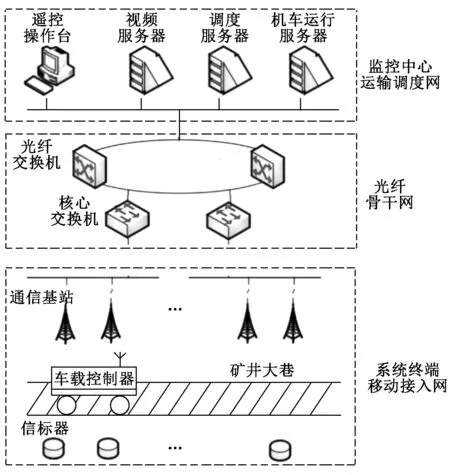
图1 矿用电机车无人驾驶系统通信网络结构图
2 电机车定位技术
无人驾驶电机车系统基于无线传感网络(WSN)技术而建立,大量传感器以无线方式组成动态通信网络,为用户提供路况图像、井下温度、电机车速度等物理信息。这些传感器有安装在轨道路径上的摄像头,也有安装在机车上的超声波测距仪和温湿度传感器等,无线传感网络必须对整个覆盖范围内的所有机车信息进行动态更新,因此完整的传感器数据必须包含位置信息,否则其他信息也将失去意义。常见的井下定位技术有Zigbee技术和RFID技术。Zigbee定位技术的原理是通过信号强度判断传感器位置,这种技术结构简单、成本低,定位范围在数百米左右,研究人员已经将这种技术成功应用于电机车监控系统中,并通过改进的定位算法提高了定位精度。RFID又称射频识别技术,通过在井下固定位置安装射频读卡器,读取电机车身上的RFID标签,获取电机车的位置信息。RFID标签成本低,这种定位技术在井下人员考勤和巷道车辆监控系统中均有应用,但是由于识别距离限制无法大规模应用。除上述以外,还有超宽带UWB定位技术和惯性定位技术等,在电机车无人驾驶系统中,采用多种定位技术、配合优化算法实现车身精准定位是未来的发展方向。
3 障碍物识别技术
电机车行进路线上可能会有井下工作人员、掉落的煤堆或其他电机车占用轨道,无人驾驶技术最基本的功能即对前方障碍物进行识别并采取制动措施,防止发生伤人、翻车和追尾事故。实现避障最直接有效的方法是对电机车前方物体测距,一旦距离小于警戒距离立即减速或刹车。测距是一种成熟的传感技术,常用的有超声波测距法、红外测距法和激光雷达测距法。超声波测距的原理是根据超声波的传播时间计算障碍物距离,但是井下空间狭小,声波容易被井壁或其他物体反射,测距效果不佳。红外测距的原理是:发射器发射红外光线经障碍物反射后被接收器接收,根据红外光线传播时间判断障碍物的距离。这种测距方式适用于井下黑暗环境,测距性能基本可以满足无人驾驶避障要求。激光雷达测距与红外测距原理类似,通过调制波传播的时间和相位变化计算障碍物距离,比红外测距更加精确。除上述方案以外,还能够通过摄像机进行视觉测距,但是对环境和数据处理能力要求较高。
4 气体环境检测技术
无论对于工作人员健康还是电机车正常运行,井下的环境都必须满足一定的条件。车载控制器需配置传感器监测温度、湿度和有害气体浓度。有害气体包括甲烷、一氧化碳、氨气等,《煤矿安全规程》规定了所有有害气体的浓度上限。对电机车和人员危害最大的是甲烷和一氧化碳,甲烷的浓度最大不能超过1%,否则全部人员应当从井下撤出,所有设备全部停运。一氧化碳无色无味,一旦超过浓度上限将导致人员中枢神经系统破坏,发生生命危险。常用的甲烷浓度检测器件有可燃气体传感器和催化燃烧元件,相较于后者,可燃气体传感器利用非色散红外原理制成,适用于爆炸性和可燃性环境,这种传感器直接输出模拟电压信号,可以方便地与主控制器模数转换模块连接。一氧化碳的检测采用根据恒电位电解式原理制成的电化学一氧化碳传感器,这种传感器输出信号为电流信号,需经过电流电压转换电路与控制器模数转换模块连接。温湿度传感器是各行各业常用的传感器,采用组合传感器更加方便。
5 电机车运动控制技术
电机车的运动控制指的是启停控制和速度控制,目前电机车均采用直流供电系统,无刷直流电机用位置传感器代替电刷和换向器,具有结构简单、调速性能好和换向无火花等优点。采用变频器驱动的无刷直流电机代替普通的可控硅直流电机调速,具有调速性能优良、节约能源的优点。电机车运动控制硬件系统如图2所示,运动控制模块主电路包括车载控制器、无刷直流电机、集成功率模块IPM、驱动电路、旋转编码器和速度检测电路等。测距传感器、定位传感器和环境检测传感器将位置信息、障碍物信息和环境信息发送给以STM32为核心的车载控制器,运动指令生成器接收上述信息后产生相应的运动控制逻辑,通过PID控制器输出占空比变化的PWM波,经驱动电路功率放大后控制无刷直流电机的转速,电机车的转速通过旋转编码器采集并反馈给控制器,形成闭环控制。在电机车运动控制技术中,最核心的技术为无刷直流电机的控制研究,常用的有最简控制法、调压控制法和电流滞环PWM控制方法。
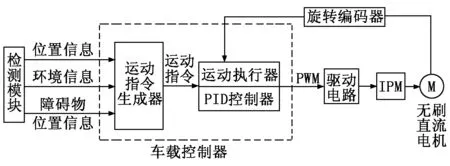
图2 电机车运动控制硬件系统框图
6 结束语
电机车无人驾驶技术网络由运输调度网、光纤骨架网和移动接入网组成。多种定位技术、配合优化算法是实现车身精准定位的发展方向。无刷直流电机在电机车的应用具有调速性能好和节约能源的优势。矿用电机车无人驾驶是集无线网络通信技术、传感器技术和先进运动控制技术于一体的综合系统,对于提高地下矿产开采的效率和安全性具有显著效果。
