无人天车防撞系统的研发
2021-08-17安乐新
摘 要:本文主要介绍了无人天车防撞系统的研发,包括硬件构成、通讯、手动防撞、自动防撞。自动防撞功能细分为一级防撞功能、二级防撞功能、地面站防撞功能。防撞功能基于PLC实现,两车间的实时距离与每部天车在库区中的实时位置依靠激光测距传感器测量,天车PLC采集激光测距传感器的数值,经过程序计算并转化成实际的距离。系统的研发能够有效避免无人天车在任意状态时发生相撞事故,保障天车以及现场人员的安全。
关键词:无人天车;地面站;手动防撞;自动防撞
中图分类号:TP273 文献标识码:A DOI:10.3969/j.issn.1003-6970.2021.03.028
本文著录格式:安乐新.无人天车防撞系统的研发[J].软件,2021,42(03):100-102
Research and Development of Unmanned Crane Anti-collision System
AN Lexin
(Tangshan Iron & Steel Group Will Automation Co., Ltd., Tangshan Hebei 063000)
【Abstract】:This paper mainly introduces the research and development of unmanned crane anti-collision system, including hardware composition, communication, manual anti-collision, automatic anti-collision. Automatic anti-collision function is subdivided into primary anti-collision function, secondary anti-collision function, ground station anti-collision function. The anti-collision function is realized based on PLC. The real-time distance of the two workshops and the real-time position of each crane in the storage area are measured by the laser range finder. The PLC of the crane collects the value of the laser range finder, which is calculated by the program and converted into the actual distance. The research and development of the system can effectively avoid the collision accident of the unmanned crane in any state and guarantee the safety of the crane and the personnel on site.
【Key words】:unmanned crane;earth station;manual collision avoidance;automatic collision avoidance
0引言
目前,无人天车技术普遍应用于钢铁行业,尤其是在钢卷库当中,无人天车承担着自动下线、自动过跨、自动上线、自动装车、自动打包等任务。无人天车代替了以往人工吊卷的方式,节省了大量的人力成本,同时在效率上也有着明显的提高。多部无人天车在同一跨间同时作业时,需要考虑两车间的防撞系统。防撞系统作为无人天车系统的重要一环,两车间的防撞距离过大,会影响无人天车的整体运行效率;當防撞距离过小,则有可能发生两车相撞事故。无人天车运行速度较快,如果两台天车相撞的话势必会造成严重的安全事故,甚至威胁库区人员的生命。因此,为了满足无人天车运行时的安全性,必须合理地设定两车间的防撞距离,研发一种较全面的防撞系统。防撞系统的研发对于无人天车在库区中能够平稳运行起着重要的作用。
1硬件构成
无人天车防撞系统硬件构成包含:天车PLC、激光测距传感器、反光板、地面PLC、无线通讯设备、交换机、编程电脑等。无人天车PLC和地面PLC采用西门子300系列,天车PLC通过西门子位置检测模块采集激光测距的数值,型号为:6ES7 338-4BC01-0AB0。无人天车PLC安装在天车电气室中,包含PS电源模块、CPU、CP343-1、CP341、AI模块、SM338等。
地面PLC安装在地面站电气室,包含PS电源模块、CPU、CP343-1、DI模块、DO模块、DP_Coupler等。无线通讯设备安装在AP箱和无线客户端中,AP箱安装在天车平台,无线客户端安装在天车车体。无线通讯设备包含西门子SCALANCE W734-1 RJ45模块、SCALANCE W774-1 RJ45模块、天线、散热风扇、稳压电源等装置[1]。
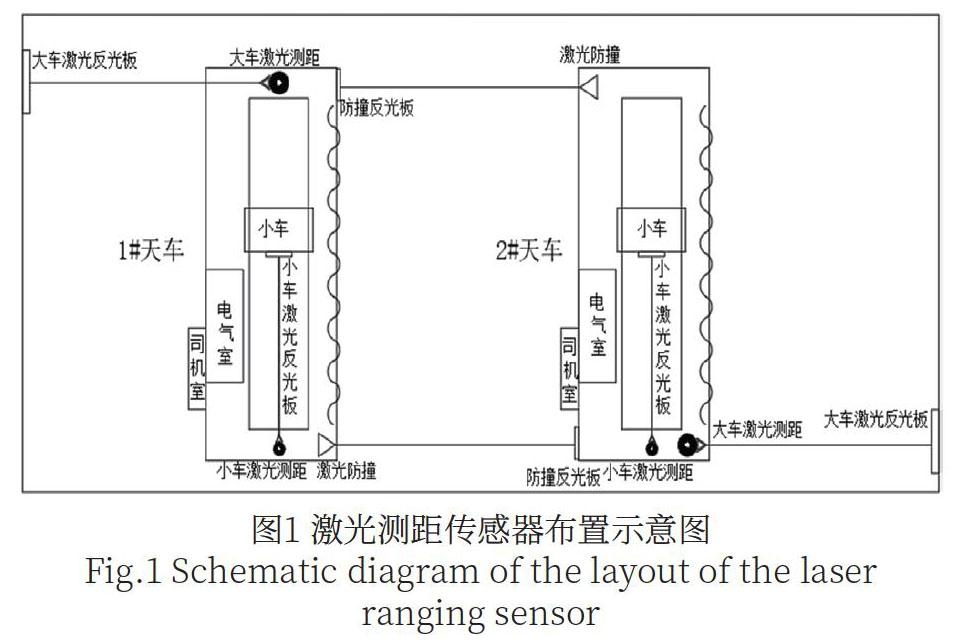
激光测距传感器安装在天车车体上,具体安装方式如图1所示,1#天车和2#天车车体分别安装大车激光测距传感器、激光防撞传感器,在跨的边缘安装大车激光反光板,车体边缘安装防撞反光板。激光测距传感器发射的激光照射到反光板上,可以直接测出对应的发射距离,在激光测距传感器面板上可以显示实际的数值。PLC采集激光测距的数值,通过程序逻辑运算可以算出大车当前的实际位置以及两车间的实际距离。
2通讯
无人天车防撞系统在自动状态下包含一级防撞功能、二级防撞功能、地面站防撞功能。二级防撞功能基于天车一级PLC与无人库区二级系统通讯实现,功能体现在无人库区二级系统。地面站防撞功能基于天车一级PLC与地面站PLC通讯实现,功能体现在地面站PLC。系统涉及的通讯包括天车PLC与无人库区二级系统的通讯、天车PLC与地面站PLC的通讯、天车PLC与现场激光测距传感器的通讯。在库区中实现无线网络全覆盖,网络采用5G频段。将天车PLC、无人库区二级系统、地面站PLC的IP地址设置在同一个网段,该网段属于无人天车系统独立的网络,不能和产线在同一网段。
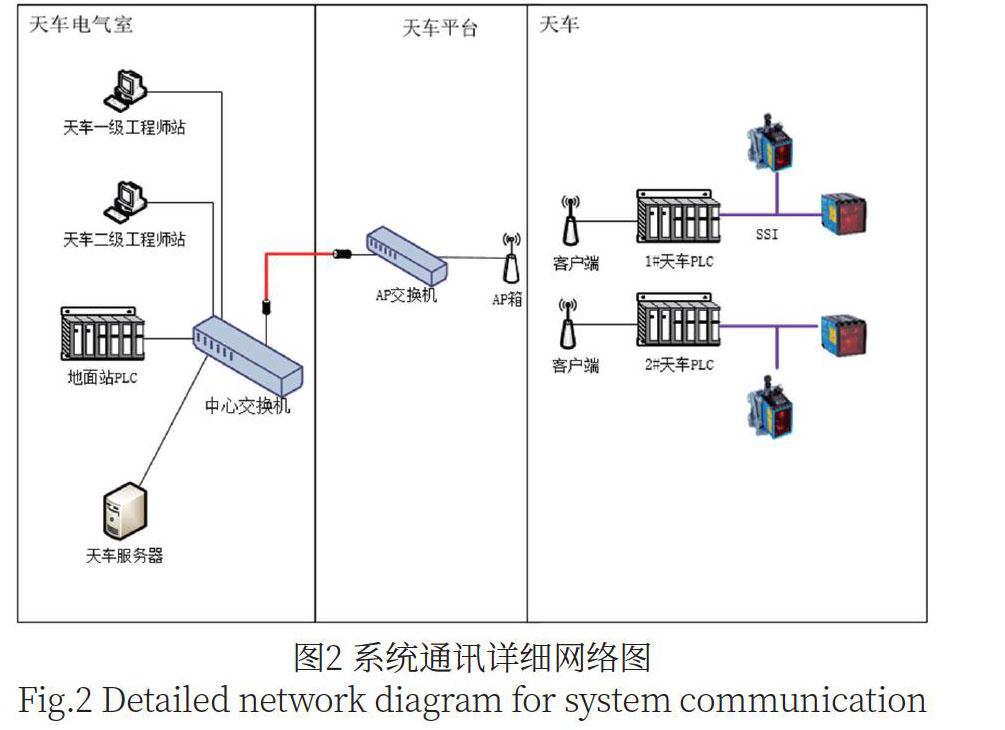
系统详细网络图如图2所示,天车PLC中CP343-1模块通过以太网连接到无线客户端SCALANCE W734-1 RJ45模块,并分别为其分配IP地址。AP箱中的SCA LANCE W774-1 RJ45模块通过以太网连接到AP交换机,并为其分配IP地址。AP交换机通过光纤连接到地面天车电气室中的中心交换机。天车服务器、二级系统工程师站、无人天车一级工程师站、地面站PLC通过以太网连接到交换机。天车PLC中的SM338模块通过SSI通讯采集激光测距传感器的数值,经过CPU逻辑运算,最终转化为天车在库区中的实际位置和两车间的实时防撞距离。
3手动防撞
天车模式共分为四种模式,分别为自动模式、有人模式、遥控模式、维修模式。自动模式即无人模式,天车会自动执行工单,不需要操作人员的控制;有人模式指的是天车工在驾驶舱通过档杆、按钮手动操控天车运行;遥控模式下驾驶舱可以无人,天车工在地面手持遥控装置便可操控天车运行;维修模式属于纯硬线控制,该模式下脱离了PLC的直接控制,因此,在维修模式下不需要增加天车间的防撞功能。
为了天车以及人员的安全,无人天车在自动模式、有人模式、遥控模式下运行时需要投入防撞功能。手动防撞是在有人模式和遥控模式下的功能。首先分别测试两台天车的制动性能,算出天车在全速状态下突然急停时大车滑行的距离,经过多次测试选出最大的滑行距离。两台天车的最大滑行距离即为理想状态下两台天车的手动防撞距离。当天车的防撞激光数值到达设定的防撞距离时,天车大车撤出速度给定。在测试阶段,如果两台天车硬件信息一致,尽量使其最大滑行距离趋于一致。如果不一致,考虑机械问题和变频器参数设定是否有差异。实际运行过程当中为了安全起见,需要加上一段安全补偿距离。
4自动防撞
自动防撞即无人天车在自动状态下的防撞功能,细分为:一级防撞功能、二级防撞功能和地面站防撞功能。
一级防撞功能:一级防撞功能通过无人天车PLC采集激光防撞传感器的数值,当数值达到设定的防撞距离时天车将暂停。具体实施过程如下:
(1)无人天车切换到自动模式,无人天车PLC接收到来自无人库区二级系统下发的移动工单后,无人天车将向指定的目标位置移动,待天车达到全速时,在二级画面点击暂停按钮,无人天车一级PLC接收到暂停命令后,天车设定速度瞬间为零,算出在自动状态下天车从高速到停止的滑行距离。以这种方式分别测算出两台天车的滑行距离,假设滑行距离分别为S1和S2。
(2)手动状态下将两台天车防撞柱紧紧贴在一起,算出贴在一起后激光防撞数值。此时的防撞数值分别设为D1和D2,数值选择大值。
(3)假设D1>D2,安全补偿值为D_offset,自动状态下天车的防撞距离D=S1+S2+D1+D_offset。反之,D=S1+S2+D2+D_offset。
参考图1,天车自动状态下,2#天車处于静止状态,1#天车朝2#天车运行时,当1#天车的实际防撞数值小于防撞距离D时,1#天车将暂停。2#天车开出防撞距离后,1#天车可继续执行工单;1#天车和2#天车相向行驶时,两台天车实时采集各自的防撞距离,当达到防撞距离后天车将分别暂停,避免两车相撞事故发生。
二级防撞功能:二级防撞功能通过无人库区二级系统来实现,在二级系统里判断是否到达防撞范围,防撞距离需设定在二级系统。如果到达防撞范围,二级向无人天车PLC发送暂停命令。通过无人天车PLC与无人库区二级系统的通讯,二级将接收来自无人天车PLC发送的大车实时位置,大车的实时位置通过大车激光测距传感器实现,两台天车初始阶段需要将大、小车坐标进行统一,即在同一个固定位置同跨两台天车的实际坐标一致。具体实施过程为:
(1)无人天车切换到自动模式,无人天车PLC接收到来自无人库区二级系统下发的移动工单后,无人天车将向指定的目标位置移动,待天车达到全速时,在二级画面点击暂停按钮,无人天车一级PLC接收到暂停命令后,天车设定速度瞬间为零,算出在自动状态下天车从高速到停止的滑行距离。以这种方式分别测算出两台天车的滑行距离,滑行距离分别设为S1和S2。
(2)手动状态下将两台天车防撞柱紧紧贴在一起,算出贴在一起后两台天车大车实际位置的差值。差值设为D3。
(3)假设安全补偿值为D_offset,自动状态下天车的防撞距离D=S1+S2+D3+D_offset。
参考图1,假设1#天车朝2#天车运行方向为坐标大方向,天车自动状态下,2#天车处于静止状态,1#天车朝2#天车运行时,二级通过通讯实时读取天车的当前位置,2#大车的当前位置与1#大车的当前位置的差值小于防撞距离时,二级将向1#天车PLC发送暂停命令,1#天车将暂停。2#天车开出防撞距离后,1#天车可继续执行工单。
地面站防撞功能:地面站防撞功能通过地面站PLC来实现,功能是将上面所述的一、二级防撞功能结合在了一起,将其通过地面站来实现,相当于多一层保护。地面站PLC与无人天车PLC进行通讯,接收来自天车的实时位置及防撞数值。地面站包含双层保护,一层通过防撞激光传感器实现,实现方式和一级防撞相同;另一层通过大车激光测距传感器实现,实现方式和二级防撞相同。地面站防撞功能需要考虑通讯延时所造成的影响,将延时造成的差值累加在安全补偿值当中。在天车自动状态下,当地面站PLC判定两车距离到达防撞距离后,向无人天车PLC发送急停信号,无人天车PLC接收到信号后,天车将触发软急停。地面站防撞功能优先级低于一、二级防撞功能。
5结语
无人天车防撞系统的研发,综合考虑了众多因素,总共设定三层保护:一级防撞功能、二级防撞功能和地面站防撞功能。当其中一层保护失效时,其它层保护均能起作用。这种多层保护能够保障无人天车在库区运行时的安全性及稳定性,在无人天车系统当中起着重要的作用。
参考文献
[1] 向晓汉.西门子PLC工业通信完全精通教程[M].北京:化学工业出版社,2013.