MMC子模块故障后线电压恢复容错控制策略
2021-08-12夏长江韩民晓耿治寇龙泽
夏长江, 韩民晓, 耿治, 寇龙泽
(1. 华北电力大学电气与电子工程学院,北京 102206;2. 先进输电技术国家重点实验室(全球能源互联网研究院有限公司),北京 102209)
0 引言
模块化多电平换流器(modular multilevel con verter,MMC)应用广泛。提升MMC运行可靠性与稳定性,有利于电能稳定、高质量地汇集、传输与分配[1—4]。子模块(sub-module,SM)故障是MMC的常见故障,为避免SM故障导致MMC退出运行,通常采用SM故障容错控制[5—6]。现有容错控制主要分为冗余容错控制和无冗余容错控制2类。冗余容错控制中,通过冗余SM替换故障SM,MMC能够快速恢复至正常运行状态,但设置冗余SM将增加换流器的成本与体积。故当MMC的SM数量较少时,通常不配备或仅配备较少的冗余SM[7]。
当MMC桥臂无冗余SM或冗余SM耗尽(以下简称:无冗余MMC)时,SM故障将导致故障相输出电压能力降低,进而导致MMC输出电压不平衡。为提升无冗余MMC应对SM故障的能力,国内外学者开展了大量的容错控制研究。文献[8]提出的容错策略同时采用三次谐波注入与直流分量注入(direct current component inject,DCCI)控制,通过DCCI将三相电压向非故障桥臂侧平移,提升MMC应对SM故障的能力。然而,若MMC已采用三次谐波注入方法提高传输容量,则不能再用于容错控制[9]。文献[10—15]采用相电压调制波重叠控制,可恢复故障后MMC输出线电压平衡,但将造成相电压波形严重畸变。文献[16—19]采用交流电压中性点转移(neutral point transfer,NT)控制,通过改变MMC输出三相电压相角,确保MMC输出线电压始终平衡。但采用NT控制时,故障相的非故障桥臂SM利用率较低。
针对当前无冗余容错策略存在的问题,文中基于NT与DCCI控制,提出应用于无冗余MMC的SM故障容错控制策略。同时,文中还提出三段式最优DCCI幅值计算方法。通过最优DCCI与NT控制,不仅能恢复故障后MMC输出线电压平衡,还能提高非故障桥臂SM的利用率与MMC输出线电压的幅值。若MMC运行于直流电压可提升的系统中,可通过增大直流母线电压,完全恢复MMC输出线电压特性。与现有文献相比,文中所提容错策略可提升MMC应对多SM故障的能力,提高输出线电压幅值,平缓容错控制过渡过程。最后,通过PSCAD/EMTDC仿真对文中所提容错策略的线电压恢复能力进行验证。
1 无冗余MMC的SM故障分析
当MMC桥臂无冗余SM时,SM故障退出运行将造成故障桥臂的部分电平缺失。如未采取有效的容错控制,将导致故障相输出电压畸变与环流陡增,严重时MMC退出运行[20—23]。
1.1 SM故障影响机理分析
三相MMC结构如图1所示。每相有上、下2个桥臂;L,R分别为桥臂电感、等效电阻;每个桥臂包含N个SM,SM为半桥结构;C为SM电容;usm为SM输出电压;稳态时SM电容额定电压为Uc0;直流侧额定电压UdcN为NUc0;ZL为MMC等效负载阻抗;ujn,ij分别为j相输出电压与电流,j=a,b,c分别表示a,b,c三相。
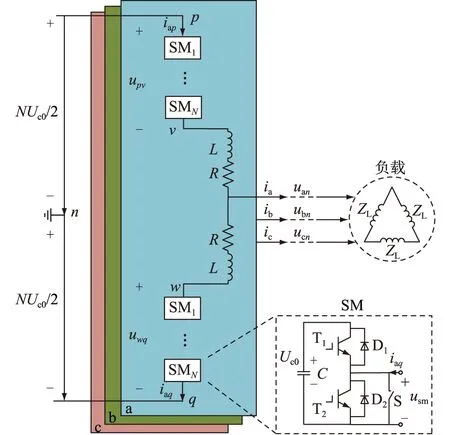
图1 三相MMC结构Fig.1 Structure of three-phase MMC
为便于分析,以a相为例,列出该相各点电压。
(1)
(2)
(3)
(4)
(5)
式中:m为相电压调制比;ω为角频率;φ0为初相角;upv,uwq分别为上、下桥臂SM输出电压;uvn,uwn分别为v,w点电压。
为探讨故障后MMC最大电压输出能力,文中对m为1的工况进行讨论。当N为6时,以a相上桥臂SM1出现故障退出运行为例,该桥臂将仅剩5个可运行的SM。故障情况下,可将a相各桥臂输出电压区域分为输出区域、故障区域(faulty aera,FA)与不可用区域(unavailable area,UA),如图2所示。输出区域是指SM故障后桥臂能够正常输出电压的区域;FA是指SM故障导致桥臂不能输出电压的区域;UA分为UA1与UA2两部分, UA1为保持SM电压稳定而不能输出的区域。当需要上桥臂输出6Uc0时,由于上桥臂SM1故障退出运行,a相将仅有5个SM投入承担全部直流电压,造成SM电压与故障相环流陡增,此时下桥臂必须投入1个SM。UA2为维持a相输出电压波形对称而无法输出电压的区域。若下桥臂输出电压为6Uc0,此时a相输出电压为3Uc0。但由于上桥臂SM1故障,a相电压无法输出-3Uc0,为维持a相输出电压波形对称,应避免下桥臂投入6个SM。
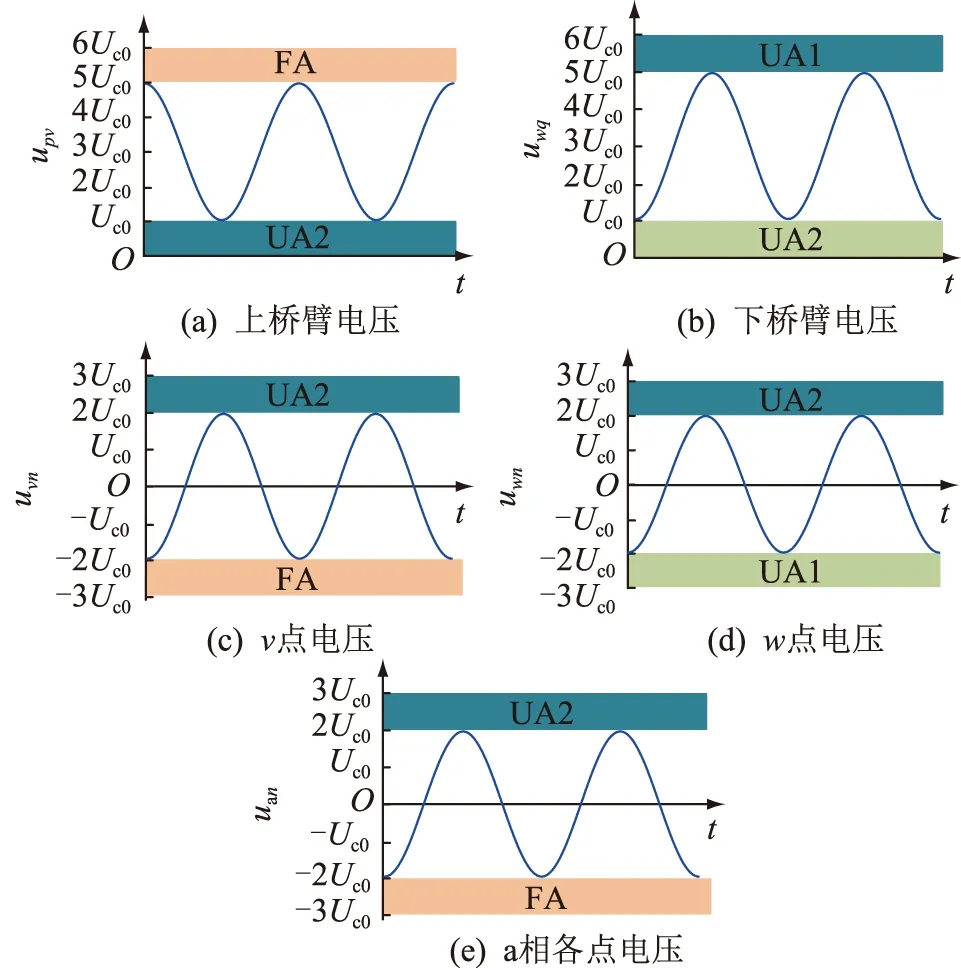
图2 a相各点电压Fig.2 Each point voltage of phase-a
如图2(e)所示,当MMC发生SM故障时,为保证输出相电压波形对称,故障相输出电压存在UA2,导致非故障桥臂SM未充分利用,降低了非故障桥臂SM的利用率,且随着故障SM增多,该影响将更甚。若通过有效容错控制减小UA2的影响,可以进一步提高故障相输出电压幅值。
1.2 无冗余MMC容错控制方法
无冗余MMC发生SM故障后,将导致故障相输出电压幅值降低,进而导致MMC输出线电压不平衡。当三相电压不平衡时,通过NT控制,改变三相电压相角,可恢复线电压幅值平衡。采用DCCI方法,可有效降低UA2影响,增大故障相输出电压幅值。
1.2.1 NT控制
MMC输出交流电压相量图如图3所示。Ujn,Ujnf分别为SM故障前、后的相电压幅值,j=a,b,c;Uij,Uijf分别为SM故障前、后的线电压幅值,i≠j,i=a,b,c;α,β,γ分别为三相电压相角差值。以N为6的三相MMC为例进行分析,当MMC未发生SM故障时,输出三相电压幅值相等,相位相差120°,如图3(a)所示,O为交流中性点。当a相上桥臂SM1发生故障退出运行时,a相输出电压幅值将降低,进而导致输出线电压不平衡,如图3(b)所示。采用NT控制后,三相电压相角差分别改变为α,β,γ,线电压恢复平衡,但中性点从O点转移到了O′点,如图3(c)所示。
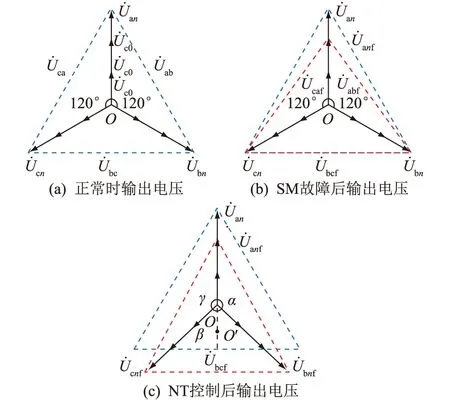
图3 MMC输出交流电压相量图Fig.3 Phasor diagram of MMC AC-side output voltage
中性点转移后线电压幅值为:
(6)
1.2.2 DCCI控制
由图2(b)可知,当MMC发生SM故障时,该相非故障桥臂输出电压将出现UA2,进而导致非故障桥臂SM利用率降低。若通过DCCI控制将相电压向UA2所在侧平移,可同时提升非故障桥臂SM利用率与MMC输出线电压幅值。
以N为6的三相MMC为例,假定a相上桥臂SM1、SM2及b相上桥臂SM1发生SM故障。故障发生后a,b相输出电压幅值分别降低为Uc0,2Uc0,如图4所示。当仅采用NT控制时,改变α,β,γ分别为240.11°,59.96°,59.93°,可得此时输出线电压幅值为2.65Uc0。
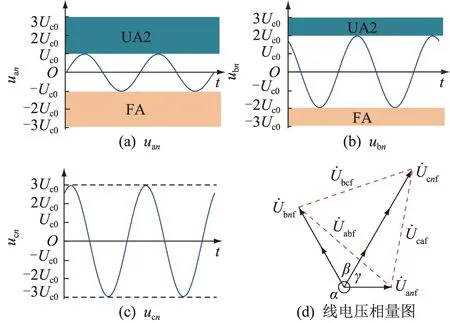
图4 DCCI控制后MMC输出交流电压Fig.4 MMC AC-side output voltage after DCCI control
为提升非故障桥臂SM利用率,向三相电压调制波注入0.5Uc0直流分量。经DCCI控制后,三相电压波形均向上平移0.5Uc0,如图5所示,NUA2,j为j相UA2宽度。

图5 采用DCCI+NT控制后的MMC输出交流电压Fig.5 MMC AC-side output voltage after DCCI+NT control
此时,a,b,c三相输出电压幅值分别为1.5Uc0,2.5Uc0,2.5Uc0。再经NT控制后,调整α,β,γ分别为132.54°,94.92°,132.54°,输出线电压幅值恢复平衡,此时线电压幅值提升至3.68Uc0,输出线电压幅值有效提升。
2 无冗余MMC容错策略实现
文中结合NT与DCCI的控制特点,提出NT联合DCCI控制的无冗余MMC容错控制策略。该策略通过NT控制可改变三相电压相角,恢复MMC输出线电压平衡。DCCI控制可将三相电压向故障SM较少的一侧平移,提高非故障SM利用率与输出线电压幅值。此外,为实现非故障SM利用率与输出线电压幅值最大化,文中还提出三段式最优DCCI计算方法。该容错策略下,所需容错参数主要为最优DCCI幅值与三相电压相角差。根据容错参数调整三相电压,MMC即可保证线电压输出平衡。若该无冗余MMC运行于直流电压允许提升的系统中,可以通过提高直流母线电压,完全恢复输出线电压至无故障水平。
2.1 容错控制参数计算
当j相发生SM故障时,假设其上、下桥臂故障SM数量分别为Nuf,j,Nlf,j,此时上、下桥臂输出电压范围为:
(7)
v,w点处电压范围为:
(8)
由式(5)可得j相电压幅值为:
Ujnf=min[|(-0.5N+Nuf,j)Uc0|,
|(0.5N-Nlf,j)Uc0|]
(9)
图5(a)中,NUA2,j表示为:
NUA2,j=N-Nuf,j-Nlf,j-2Ujnf/Uc0
(10)
当UA2位于相电压正半轴时,称为上侧UA2,反之称为下侧UA2。设三相电压全部上侧UA2宽之和与全部下侧UA2宽之和分别为NUA2,up与NUA2,bl。DCCI控制的目标为减小UA2的宽度,故选择NUA2,up与NUA2,bl最大一侧作为直流分量注入的方向。在直流分量注入方向上,对NUA2,j进行排序,从小至大依次为NUA2,1,NUA2,2,NUA2,3。当注入直流分量幅值大于该相UA2宽度时,该相电压幅值降低,如图5(c)所示。因此,当注入的直流分量幅值等于0.5NUA2,3时,三相UA2已全部转为输出区域。若继续增大注入幅值,必将导致三相电压幅值与线电压幅值均降低,无法满足输出线电压最大化的容错控制目标。设MMC注入直流分量的幅值为KUc0,则K的取值范围为:
K∈[0,0.5NUA2,3]
(11)
为应对各种可能的SM故障情况,根据DCCI幅值的不同取值,注入直流分量后三相电压幅值表达式分为3部分进行计算。
(1) 当K∈[0,0.5NUA2,1]时。
(12)
式中:Uxn(x=1, 2, 3)分别为NUA2,x所对应相DCCI控制前的电压幅值;Uxnf为该相DCCI控制后的电压幅值。
此时随着K增加,三相UA2均逐渐转为输出区域,因此三相电压幅值均增大。
(2) 当K∈(0.5NUA2,1,0.5NUA2,2]时。
(13)
当K取值大于0.5NUA2,1后,该对应相的电压幅值将随K的增大而减小。
(3) 当K∈(0.5NUA2,2,0.5NUA2,3]时。
(14)
DCCI控制后,三相电压幅值虽有提升,但不能确保MMC输出线电压平衡。因此还需采用NT控制,确保输出线电压平衡。经NT控制后,线电压为:
(15)
(16)
式中:U12f,U23f,U31f为容错控制后线电压幅值;θ12,θ23,θ31为三相电压相角差值。
(17)
(18)
根据上述分析,容错控制后三相电压调制波为:
(19)
提升直流侧电压后,MMC正常工作的SM电压提升至(1+T)Uc0。但调制过程中,SM电压仍按额定电压Uc0进行计算,故三相电压调制波也应按Uc0给出。
2.2 容错控制流程
由2.1节分析可知,文中所提容错控制策略的容错控制参数均可由离线计算得到,不会增加控制器运算负担,控制流程如图6所示。
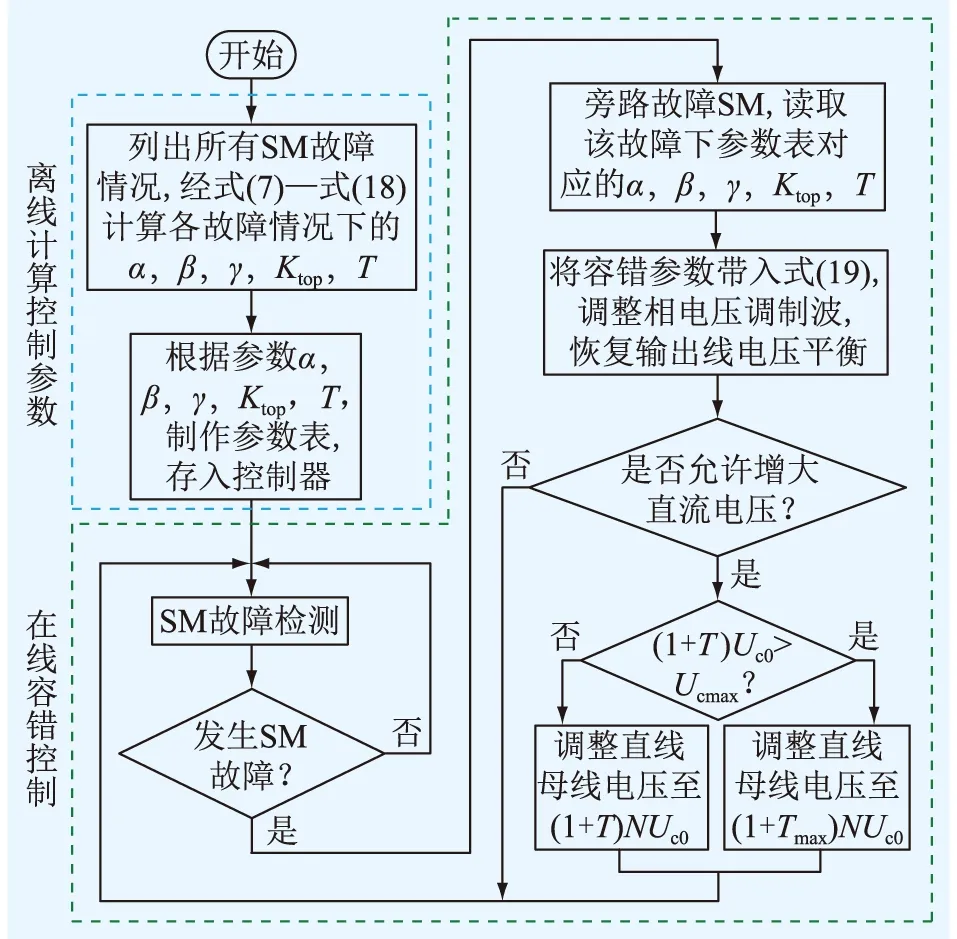
图6 容错控制流程Fig.6 Fault-tolerant control flow
MMC投入运行前,首先列出各种SM故障情况。然后,根据式(7)—式(18)求得各故障情况下α,β,γ,Ktop,T等容错控制参数,同时制作容错控制参数表并存储于MMC控制器中。MMC投入运行后,当检测到SM发生故障时,控制器迅速闭锁故障SM,同时查询容错控制参数表,读取该故障情况下对应的容错控制参数。然后,根据容错控制参数对直流分量注入幅值、三相电压相角差进行相应调整,MMC输出线电压即可恢复平衡。最后,由上级控制单元判断是否调整直流母线电压,若可以调整则增大直流侧母线电压,至此容错控制完成。
当MMC的N为10时,在不同SM故障情况下,MMC分别采用NT+DCCI容错控制与文献[18]提出的容错控制策略。2种容错策略下的容错控制参数如表1所示。Ulf为容错控制后MMC输出线电压幅值;ΔUl为容错控制后线电压幅值下降比率。
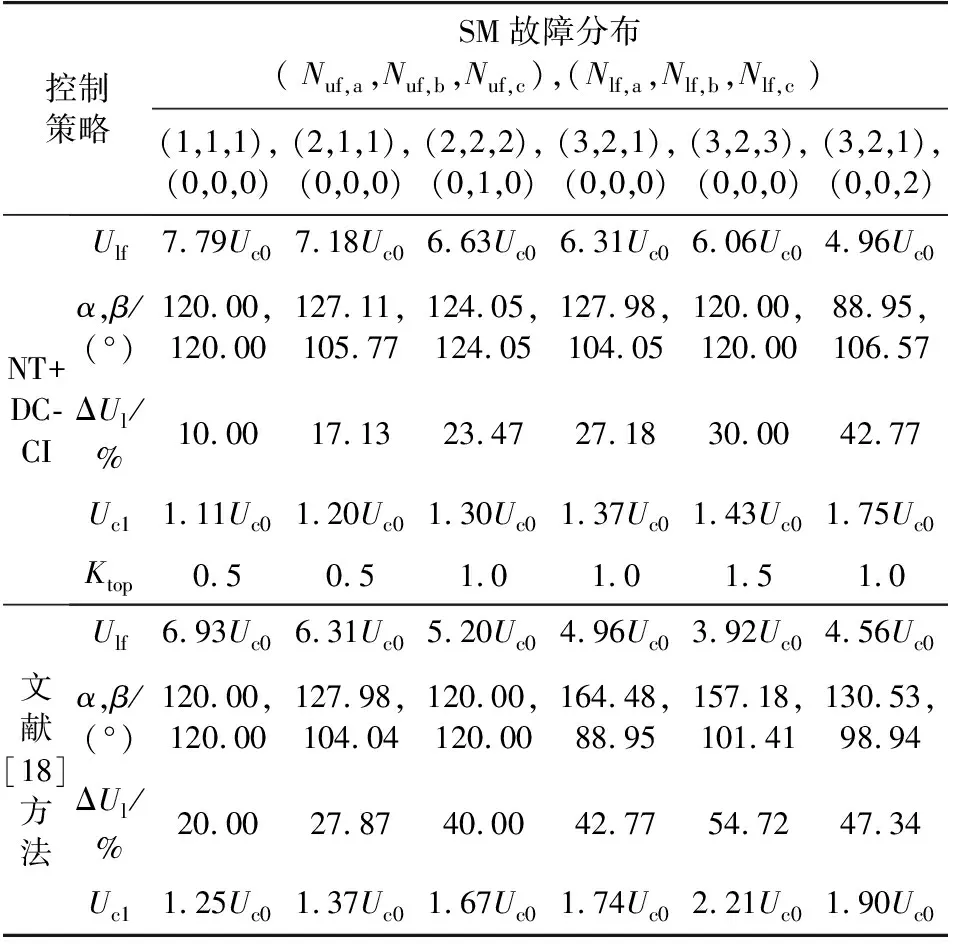
表1 部分容错控制参数Table 1 Partial fault-tolerance control parameters
若SM允许过电压能力大于30%,且系统允许直流母线电压提升。由表1可知,当MMC共7个SM发生故障,其分布情况为(2,2,2),(0,1,0)时,采用NT+DCCI容错控制策略,则MMC能够完全恢复线电压幅值。相较于文献[18]提出的容错控制策略,采用NT+DCCI容错控制时,MMC输出线电压幅值明显增大,且提高了无冗余MMC应对多SM故障的能力。
3 仿真分析
为验证所提无冗余MCC容错控制策略,基于PSCAD/EMTDC平台搭建如图1所示的N为10的三相MMC仿真模型,主要参数见表2,Usm,max为SM最大工作电压,调制方式采用文献[24]的改进型载波层叠调制。
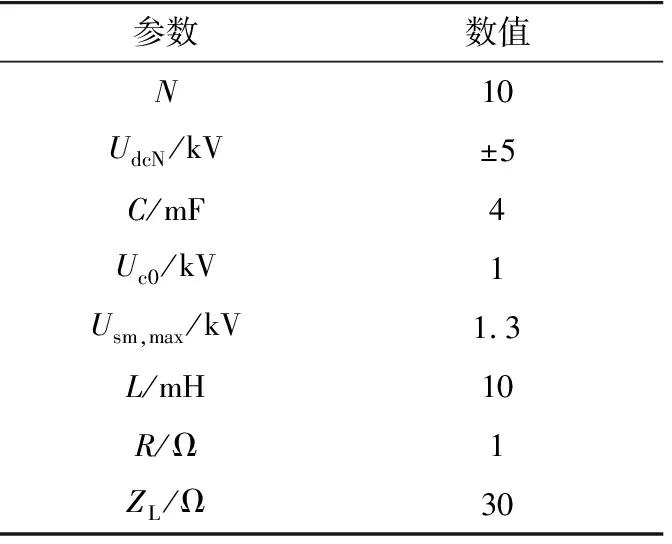
表2 仿真模型参数Table 2 Simulation model parameters
假定a相上桥臂SM1、SM2以及b相、c相上桥臂SM1发生故障退出运行,分别采用NT+DCCI与文献[18]提出的容错策略进行容错控制。仿真结果分为6个时段,如图7所示。6个时段分别为:① 非故障时段:该时段SM无故障发生;② SM故障时段:该时段SM发生故障,但系统未进行容错控制;③ NT控制时段:该时段采用文献[18]提出的NT容错控制方法;④ NT+DCCI控制时段:该时段采用文中所提容错控制策略;⑤ 直流电压提升时段:该时段通过调整直流侧母线电压,恢复线电压额定幅值;⑥ 线电压幅值完全恢复时段:该时段线电压幅值恢复至额定值。
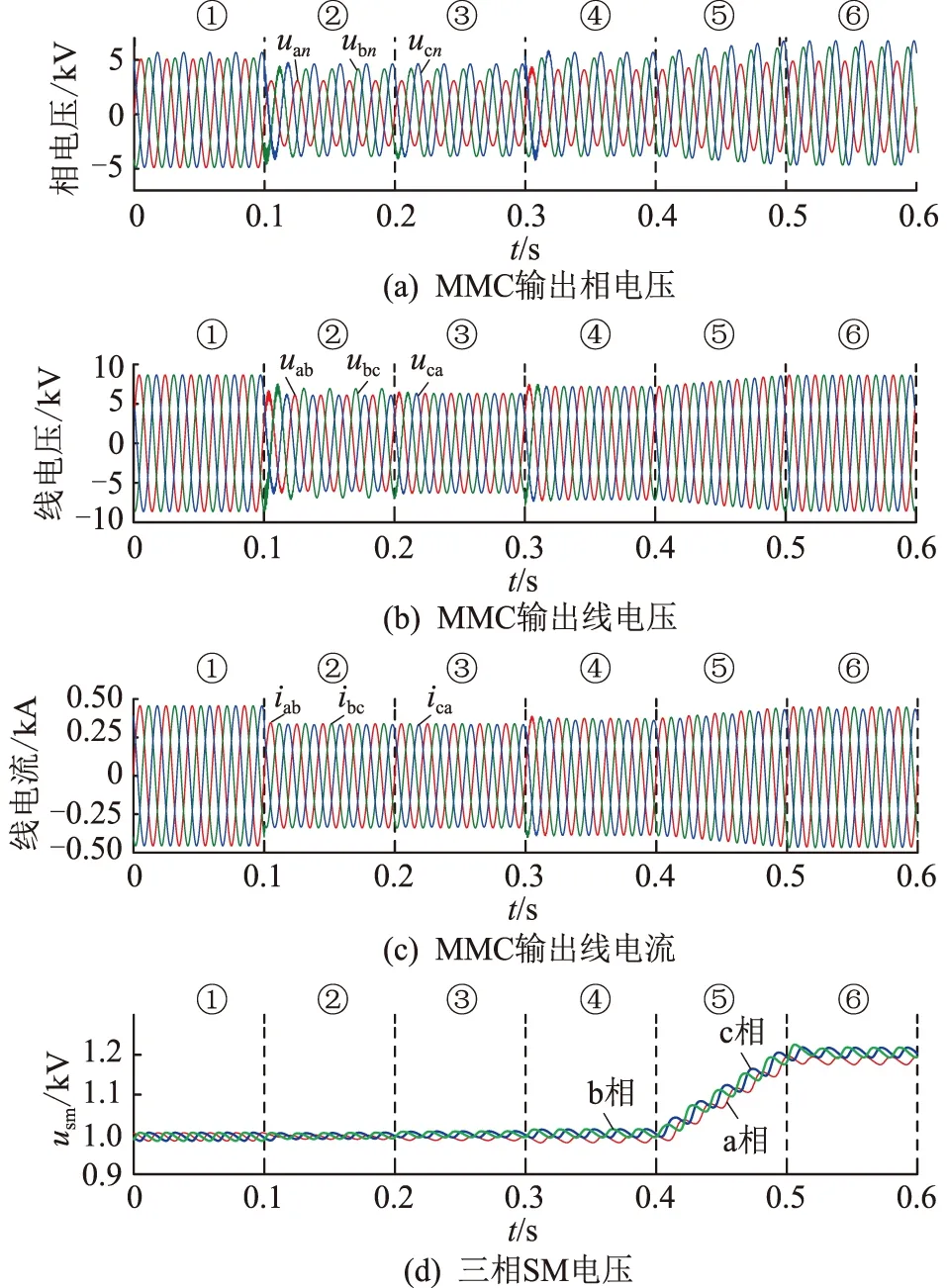
图7 无冗余MMC容错控制仿真结果Fig.7 Simulation results of no-redundancy MMC fault-tolerant control
t为0.1 s时,SM发生故障,由于故障桥臂SM数减少,相电压幅值分别降为3 kV,4 kV,4 kV,如图7(a)所示。由于0.1 ~0.2 s期间未投入容错控制,不平衡相电压产生不平衡线电压,如图7(b)所示。当负载平衡时,不平衡线电压进一步导致线电流不平衡,如图7(c)所示。t为0.2 s时,投入文献[18]的容错控制策略,改变α,β,γ分别为127.98°,104.04°, 127.98°,此时线电压恢复平衡,其幅值约为6.31 kV,同时线电流恢复平衡。t为0.3 s时,切换至NT+DCCI容错控制,由表1获取容错控制参数Ktop,α,β,γ分别为0.5,127.11°,105.77°,127.12°。相电压幅值分别提升至3.5 kV,4.5 kV,4.5 kV,线电压幅值恢复至约7.18 kV。由图7(b)可知,相较于文献[18]提出的容错控制,采用NT+DCCI容错控制时,输出线电压幅值明显提升,提升比率约为13.79%。
若该系统直流母线电压允许增大,由表2可知SM允许过压能力为30%,则可通过增大直流电压恢复线电压幅值。因此,t为0.4 s时,逐渐提升直流侧母线电压至±6 kV,t为0.5 s时,输出线电压幅值完全恢复。直流母线电压提升过程中,电压逐渐增大至1.2 kV,小于SM最大允许工作电压1.3 kV。由图7(d)可知,SM电压提升过程平缓,未出现冲击性的电压波动,不会对SM中电力电子器件造成冲击性影响。
为分析该容错控制策略的系统响应速度,当t为0.1 s检测到SM发生故障时,直接采用NT+DCCI容错控制,MMC输出相电压与线电压仿真波形分别如图8(a)、(b)所示。SM故障发生后,控制器迅速根据容错控制参数表调整三相电压幅值与相位,由图8(a)、(b)可知,此时相电压与线电压均出现了小幅波动,但该波动持续衰减,并在0.02 s内恢复平衡稳定。仿真结果表明,该容错控制系统具有较好的响应速度。
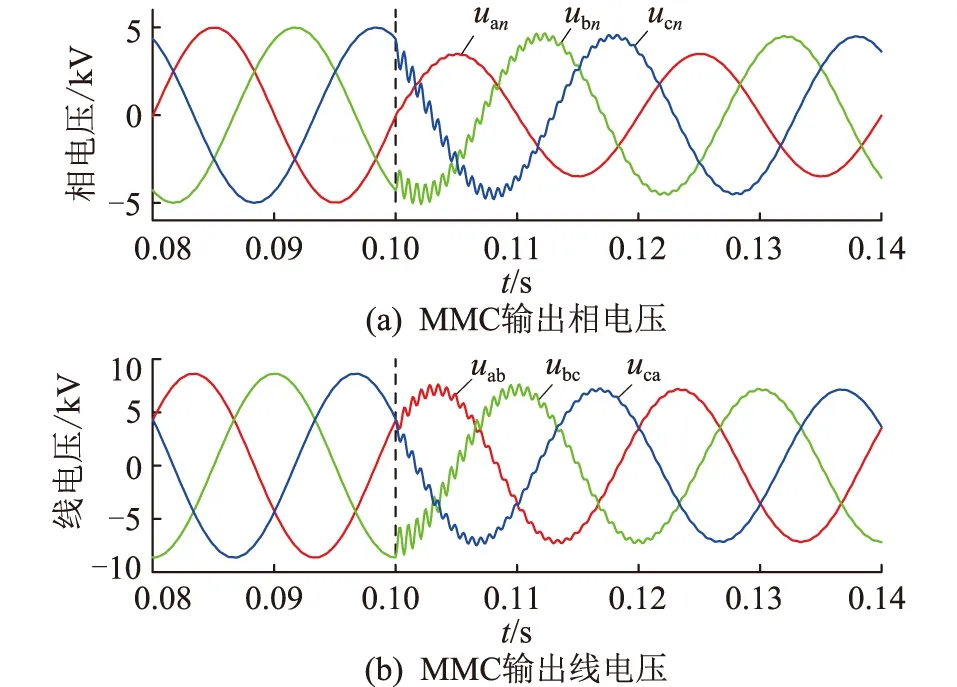
图8 MMC输出电压仿真结果Fig.8 Simulation results of MMC output voltage
4 结语
为提升无冗余MMC应对SM故障的能力,文中首先分析了SM故障对无冗余MMC的影响机理,然后提出了NT+DCCI容错控制策略以及最优DCCI幅值的计算方法。与现有容错策略相比,NT+DCCI容错控制有效提升了无冗余MMC应对多SM故障的能力,提高了非故障桥臂SM利用率,增大了故障后MMC输出线电压幅值,避免了输出相电压波形的畸变,具有系统响应快、输出电压暂态过程平缓等优点。
在面对多SM故障时,NT+DCCI容错控制能显著提升无冗余MMC持续输送电能的能力,从而提高其所处系统的可靠性与稳定性。
本文得到先进输电技术国家重点实验室开放基金项目(GEIRI-SKL-2020-011)资助,谨此致谢!