基于差动制动的汽车拖车组合系统动态稳定性滑模控制
2021-08-06赵子乾殷国栋孙蓓蓓吴建华
赵子乾 张 宁 殷国栋 孙蓓蓓 吴建华
(东南大学机械工程学院, 南京 211189)
汽车拖车组合系统(car-trailer combinations,CTC)的车身摆振现象是车辆动力学领域的难点问题,表现为牵引车、拖车分别或者同时发生周期性的横摆运动,且随时间发散直至失稳的现象.
对于CTC动态稳定性研究已经形成比较成熟的体系.Kurtz等[1]早在1977年提出了3种摆振形式:牵引车摆振、拖车摆振和两车身同时摆振.Kharrazi等[2]对于后向放大效应进行了研究,发现牵引车的横摆角速度和侧向速度会随着铰接点的传递增加,表现为拖车的横向运动幅值常常大于牵引车的幅值.Zhang等[3]建立了较为完整的动力学模型,并从时频域角度对摆振现象进行了深入分析,随后又设计了一种基于车辆横摆角速度的建模方法来模拟道路试验中观测到的谐波效应[4].杨秀建等[5]结合不足转向梯度和系统阻尼特性探讨了极限工况下的CTC失稳机制,认为稳定性控制目标应为牵引车横摆角速度和挂车侧偏角.
目前对于CTC的稳定性控制研究尚不成熟.Hac等[6]提出了稳定性控制的2种思路:同步制动降低车速和差动制动控制横摆运动.其中,差动制动控制横摆运动的方法更具有主动性,与同步制动降低车速方法相比具备响应快、收敛迅速的特点.Vempaty等[7]指出,对于CTC横向稳定性控制,差动制动、主动转向和主动侧倾控制均可提高系统稳定性,但由于参数不确定和非线性,控制方法和执行器作用方式仍需要进一步探究.Xia等[8]对于轨道车辆稳定性控制进行了研究,突破水平动力学范围,通过控制主动悬架来优化车身的横摆运动,达到降低低频摆振的目的.Kural等[9]设计了一种主动转向控制策略,将前后车身控制转化为一种路径跟踪问题,提高了重型半挂车辆的机动性能和横向稳定性.谢兆夫等[10]提出了一种基于三轴非铰接重型车辆的差动制动稳定性控制方法,从车辆自身ABS出发,采用LQR横摆力矩控制方法实现车辆防侧翻控制.考虑到摆振现象具备发散速度较快、反应时间短的特点,基于差动制动的控制策略更加符合CTC稳定性控制需求.
为此,本文研究了基于差动制动的CTC动态稳定性滑模控制(dynamic stability sliding mode control,DSSMC).提出了CTC系统的稳态转向动力学模型,分析了在一定前轮转角输入下的整车横摆动力学响应,并以此作为动态稳定性的控制目标.然后建立了横摆角速度滑模控制器,通过差动制动在两节车身分别施加额外的横摆力矩,实现了CTC动态稳定的效果.仿真结果表明,DSSMC系统可以有效控制系统摆振,增加系统横摆运动的收敛速度,提高了CTC的动态稳定性.
1 输入拓展型CTC系统单轨模型
为分析基于差动制动的CTC动态稳定性,在传统线性单轨模型[2]上添加差动制动产生的附加横摆力矩,与车轮转角共同作为系统输入,构成了输入拓展型单轨模型.该模型是一种双车轴拖车模型,参考系为车身固定坐标系,忽略空气动力学及其影响,在前轮转角、轮胎侧偏角、牵引角都较小情况下,进行侧偏刚度线性化和小角度近似,可以较好地反映CTC侧向动力学特征.


图1 基于差动制动的CTC线性单轨模型
根据牵引车与拖车的动力学关系、铰接点的物理约束关系,可得如下微分方程:
m1ay,1=Fyf,1+Fyr,1-Fyh,1
(1)
(2)
m2ay,2=Fyf,2+Fyr,2+Fyh,2
(3)
(4)
将其转化为状态空间方程得
(5)
其中
式中,vy,1为牵引车的横向车速;M和E为与车辆参数有关的常数矩阵;D(vx)为与纵向速度相关的系数矩阵;x为系统状态向量;u为包含了前轮转角和横摆力矩的系统输入.M和D(vx)矩阵与Zhang等[3]的常系数矩阵一致.
状态方程可以转化为
(6)
A(vx)=M-1D(vx),B=M-1E
式中,A(vx)为vx的函数;B为定常矩阵.采用公式(6)描述CTC系统动态特性,可以研究车身摆振、蛇行等振荡发散行为.
2 系统动态稳定性滑模控制


图2 DSSMC系统结构图
2.1 控制目标设计
研究了在一定车速、前轮转角输入下,CTC车身横摆角速度、质心侧偏角的稳态响应,并作为CTC动态稳定性的控制目标.这也是稳态转向概念首次被引入到CTC系统稳定性控制中.
在一定的前轮转角输入下,假设CTC以匀速稳定行驶,且行驶轨迹为定圆,横摆角速度、质心侧偏角均不随时间发生改变,可以求得CTC系统在中性转向状态下的横摆响应,且该响应仅与车辆参数、当前车速和前轮转角有关.CTC系统达到稳态转向状态时,横摆角速度增益为定值,在此状态下可以认为
(7)
将其代入式(5)得
Dref(vx)xref+Erefuref=0
(8)
其中
uref=δw
式中,vy,2为拖车的横向车速;vy,ref为横向车速的期望值,根据βref=vy,ref/vx,可求得质心侧偏角期望值;θh,ref为牵引角的期望值;Dref(vx)为与车速有关的系数矩阵;d11,d12,…,d34为常系数,与Zhang等[3]的常系数定义一致;Eref为定常数矩阵.

2.2 滑模控制器设计
在CTC发生摆振、折叠等横向失稳现象前,往往存在较大的横摆角速度,且由于后向放大效应,横摆角速度还会随着铰接点的传递逐步放大.考虑到差动制动产生的横摆力矩可以直接影响到CTC的横摆角速度,宜选用横摆角速度作为控制目标,计算期望的横摆力矩.
求解横摆角速度与中性转向状态期望值的误差,并建立滑模面
(9)

选取指数趋近律
(10)
(11)

对式(9)求导,得
(12)
(13)
由牵引车横摆力矩的受力分析得
(14)
将式(13)和(14)联立,可以得到牵引车期望附加横摆力矩

(Fyf,1lf,1-Fyr,1lr,1)
(15)
同理,可以得到拖车的期望附加横摆力矩

(Fyf,2lf,2-Fyr,2lr,2)
(16)
(17)

3 仿真与分析

根据《道路车辆 乘用车列车 横向稳定性试验》(GB/T 29121—2012/ISO 9815—2010)和《汽车操纵稳定性试验方法》(GB/T 6323—2014)稳定性试验方法,分别设计了2种仿真工况:前轮转角半正弦波输入的动态临界车速仿真;前轮转角连续正弦输入的蛇行工况仿真.半正弦波输入作为初始扰动,可以激发车身摆振现象,在此工况下探究DSSMC是否可以使车身运动迅速收敛,衡量系统尽快恢复稳定的能力;蛇行工况则从CTC的车身瞬态响应出发,衡量系统在稳定范围内的机动能力,避免控制器过于敏感影响两节车身的动态响应.
CTC输入拓展型单轨模型中的整车参数如下:m1和m2分别为1 955、1 880 kg;lf,1、lr,1和lh,1分别为1.302、1.383、2.166 m;Iz,1为2 690 kg·m2;Cαf,1和Cαr,1分别为1.91、3.23 kN/(°);lf,2、lr,2和lh,2分别为0.124、0.526、5.073 m;Iz,2为10 350 kg·m2;Cαf,1和Cαr,1分别为2.03、1.96 kN/(°).车辆运行在摩擦系数为0.6的平面道路上,且忽略空气阻力、悬架等影响因素.仿真结果显示该车的临界车速约为33.1 m/s,因此选取108、126 km/h进行动态稳定性仿真,分别代表了低于和高于临界车速的车辆动态响应.
3.1 动态临界稳定行驶工况仿真
动态临界车速仿真下,前轮转角半正弦波输入如图3所示,车速分别为108、126 km/h时的动态稳定性响应如图4所示.

图3 动态临界车速仿真输入

(a) vx=108 km/h下牵引车相平面

(d) vx=108 km/h下附加横摆力矩

(g) vx=126 km/h下牵引角
在车速为108 km/h,即低于临界车速时,结合图4(a)~(b)可以发现:无控制的CTC在临界车速以下缓慢收敛,在临界车速以上逐步发散;TYC下的系统在2种车速下均保持了较小的横摆角速度,但是与稳态转向模型得到的期望值差距较大;DSSMC可以将横摆角速度很好地控制在期望值附近,将质心侧偏角误差降低了40%,大幅提高了质心侧偏角的响应精度.通过图4(c)的牵引角时域响应图可以发现:DSSMC和TYC的收敛速度提高了一倍,而TYC在初始阶段与期望值幅值相反.图4(d)的附加横摆力矩图显示:TYC下横摆力矩的峰值首次出现在1.0 s左右,而DSSMC的横摆力矩峰值首次出现在0.7 s左右,将横摆力矩的响应速度提升了30%;DSSMC则可以实现跟随前轮转角的快速响应,在车身仍然稳定的情况下便出现了横摆力矩峰值,因此可以认为TYC的牵引角方向与期望值相反是由响应过于迟滞导致的.
在车速126 km/h,即高于临界车速时,其结论基本与车速108 km/h时一致.图4(e)~(f)显示,无控制状态的车身已大幅失稳,DSSMC和TYC的表现与车速108 km/h时类似.图4(g)中,TYC的牵引角第1个峰值仍与期望值相反,DSSMC和TYC的收敛速度依然迅速且基本同步.图4(h)中附加横摆力矩波形与图4(d)一致,但是幅值略有增加.
3.2 蛇行行驶工况仿真
从车速分别为108、126 km/h时的动态临界车速仿真中可以发现:在低于和高于临界车速时,控制系统均能保持较好的稳定性,且车身动态稳定性响应波形基本一致.因此,蛇行行驶工况仅选取车速为126 km/h时的响应,前轮转角输入如图(5)所示,仿真结果如图(6)所示.

图5 蛇行工况仿真输入


(a) 牵引车横摆角速度
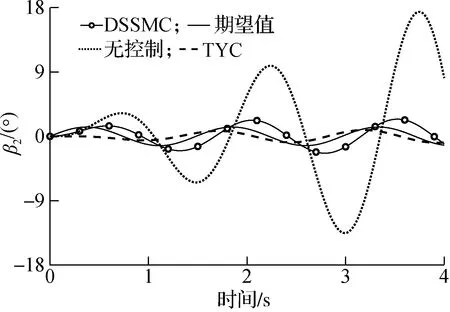
(d) 拖车质心侧偏角
4 结论
1) 建立了基于差动制动的输入拓展型单轨模型和CTC中性转向状态的稳态转向模型.在传统CTC单轨模型中添加了由差动制动产生的横摆力矩,建立了输入拓展型单轨模型;使用了状态空间方程描述CTC稳态转向状态,构建了稳态转向模型.
2) 提出了一种基于差动制动的CTC动态稳定性滑模控制方法,以稳态转向状态下的横摆角速度为控制目标,建立了动态稳定性滑模控制系统,根据横摆角速度与期望值的差距,同时在两节车身施加附加横摆力矩,使得CTC系统摆振运动尽快收敛,增强高车速下的行驶稳定性.
3) 动态临界稳定行驶工况仿真结果表明,本文提出的控制系统在前轮转角发生初始扰动的情况下,有效避免了车身摆振现象,使得质心侧偏角误差降低了40%,附加横摆力矩的响应时间缩短了30%;在前轮转角连续输入的工况下,提高了横摆角速度、质心侧偏角的控制精度,提高了CTC系统的动态稳定性.
