导线测量的归化改正方法在控制网建立中的应用与精度分析
2021-08-04苟长龙张宁锋陈好宏李凤娟
苟长龙 张宁锋 陈好宏 李凤娟
(甘肃交通职业技术学院,甘肃 兰州 730070)
0.引言
随着工程测量技术的发展,GNSS定位技术建立控制网已经逐渐取代传统的全站仪导线测量技术,GNSS定位技术不仅具备高精度的静态定位技术,还能使用携带便捷迅速的RTK技术进行碎步测量。但是,在一些特殊测量地点,例如井下、偏僻林间,会存在卫星信号不好或者无信号的情况,因此导线测量技术虽然不像从前应用广泛,但是依然存在重要的作用。导线测量的具体步骤大致为,首先根据具体地形情况及测量要求确定控制点,然后由起始已知点开始,使用一台全站仪和两台棱镜沿控制点的导线进行测量,通常每站测量两次,每测回测量两次,即每站的测量数据有四组,测量完毕后,闭合到另一个已知点上,在角度平差、坐标平差均符合要求的前提下,可以将解算的控制点坐标作为已知数据使用。
导线测量建立平面控制网作为小区域工程或加密控制点中的常见方法,距离测量的精度直接影响了坐标正算的精度[1,2]。距离测量的改正计算主要有三类:仪器系统误差、大气折光误差、归算改正误差;其中系统误差可以在测量前精确求得,大气折光误差的计算受气象条件的改变会发生变化,因此在测量中主要进行改正的是归算改正误差[3,4]。归算改正误差主要有归算到水平面上的改正和投影到高斯平面上的改正,简称为归算改正和投影改正[5,6]。由于两项改正值在数值上非常小,因此为验证归算改正和投影改正在导线测量中的改正效果,本文结合巷道掘进中确定方向的实际应用问题,以井下的长距离导线测量数据为例,分别计算未改正距离和距离改正后的控制网坐标平差精度,以此作为评价距离改正效果的指标。通过实例验证,探讨双差改正对导线测量的精度影响,针对其中存在的低精度点出现的原因寻找解决方案。
1.归算改正和投影改正
归算到水平面上的改正计算公式如式(1)所示:

式(1)中,ΔS为归算到水平面上的改正值;S为观测边长值;H为观测测站与棱镜站的平均高程;R为地球平均半径,计算式中距离单位统一为m,H与ΔS始终异号。
投影到高斯平面上的改正计算公式如式(2)所示:

式(2)中,ΔG为投影到高斯平面上的改正值;ym为导线边中点到投影带中央子午线的距离,即导线边的平均横坐标,计算式中距离单位统一为m。
由以上改正式可知:计算前,除应获取对应边的距离测量值,还应得知以下信息:观测测站与棱镜站的平均高程、导线点的横坐标,观测测站与棱镜站的平均高程可由水准测量获取;实际计算时导线点的横坐标不需要太精确,因此使用概略坐标即可,地球平均半径取6371km。
2.导线近似平差
得到距离测量值后,对附合导线进行近似平差,以获得平差后的坐标值。
计算导线角度闭合差如式(3)所示:

式(3)中,fβ为导线闭合差;α′BN为计算的终末端点坐标方位角;αBN为已知的终末端点坐标方位角。
分配角度闭合差如式(4)、式(5)所示:
式(4)、式(5)中,vβi为角度改正值,式(4)用于左角,式(5)用于右角。
根据改正后的角度观测值进行坐标正算,计算终末端点坐标值,并计算坐标闭合差如式(6)、式(7)所示:

式(6)、式(7)中,fx、fy分别为X、Y的坐标闭合差;x′B、y′B分别为计算的终末端点X、Y坐标值;xB、yB分别为已知终末端点X、Y坐标值。
分配坐标增量闭合差如式(8)、式(9)所示:
式(8)、式(9)中,vΔxij为X坐标增量改正值;vΔyij为Y坐标增量改正值;Sij为测量导线边长;∑S为测量路线总长。
改正后的坐标增量如式(10)、式(11)所示:


式(10)、式(11)中,Δxij、Δyij为改正后的坐标增量;Δx′ij、Δy′ij为未改正的坐标增量。
坐标增量改正后,再进行一次坐标推算,即可得到导线平差结果。
本文中,由于需要对边长进行改正,因此文中所用Sij应为进行了归算改正和投影改正以后的值。
3.工程概况
某项目处在矿井巷道中,进行掘进贯通,需要通过导线测量确定控制点坐标,继而对巷道掘进的方法与进度进行调控。为确保巷道掘进方向的正确性,在导线测量完成后及时进行导线平差计算和高程计算,以确定导线点的平、高位置和导线方向。由于贯通巷道两端的施工属于两个施工队伍,需要及时协调,给工作带来了困难。在整个工程中共重点给出三次巷道掘进方向确定通知。从而确保了巷道掘进方向,高精度地完成了巷道的贯通。
导线等级要求信息(如表1所示):
测量过程中,由于地形复杂,存在较短的导线边,因此短边测量时应采用“三联脚架法”的“三架法”或“四架法”,提高作业效率,减少对中误差影响。
4.实例验证
实例验证选取了39次导线边测量成果,观测成果与改正的主要组成为:观测边长,每站测量4次,每测回测量2次,共2测回,取平均值;平均高程,由平差以后的高程值平均值计算得到;近似坐标,由现有的概略坐标值获得;双差改正,由计算得到;总改,为双差改正的和;改正边长,观测边长与总改的和。测量成果与归算改正和投影改正的结果(如表2所示):
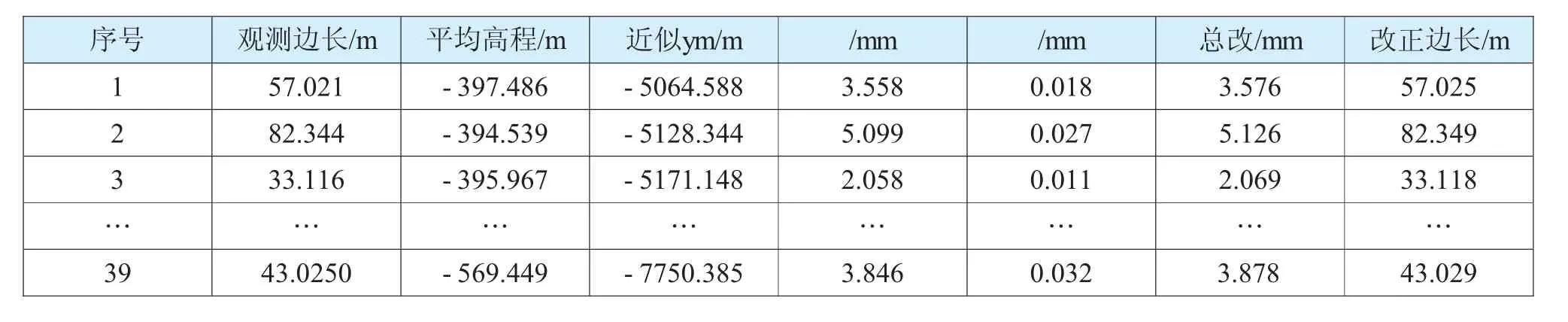
表2 测量成果与归算改正和投影改正结果
为验证进行改正后的边长是否有一定的精度提高,按照改正的导线边长对导线进行近似平差,解算其坐标值结果。得到未改正边长的坐标值与改正边长后的坐标值,将两种坐标值与已知真值相减,得到两种坐标值与真值的差,将误差列表(如表3所示)。其中未改正的坐标,即为导线测量后,进行双连接角平差后的坐标值,改正的坐标具体指,在获取边长数据后进行双差改正,然后再进行双连接角导线平差,最终获得的坐标值。

表3 两种坐标值与真值的差
由表2可以看出:边长改正后,原本误差较小的点误差有一定减小,但由于未改正时误差较小,因此减小的误差比较有限;有部分原本误差较大点,改正后误差明显减小,可知
由图1可知:X坐标在25点号以后出现了较大误差波动,针对这种误差波动,边长改正虽然可以进行一定的精度提高,但依然会出现较大误差;Y坐标在31点至33点处出现了较大误差,边长改正起到了一定的削弱作用,但未完全克服;综合表1、图1和图2,当原始测量精度较高时,边长改正可以进一步提高观测精度,精度提高在50%以上;当原始边长改正能在一定程度上提高导线解算的精度;由于表格数据不直观,因此将表2数据绘制折线图,其中X坐标误差(如图1所示),Y坐标误差(如图2所示):测量精度较低时,边长改正仅能在一定程度上减小误差,但效果并不足以忽视该点的误差,因此该种粗差点应当采用其他方法处理,例如,重测或加测陀螺定向边。
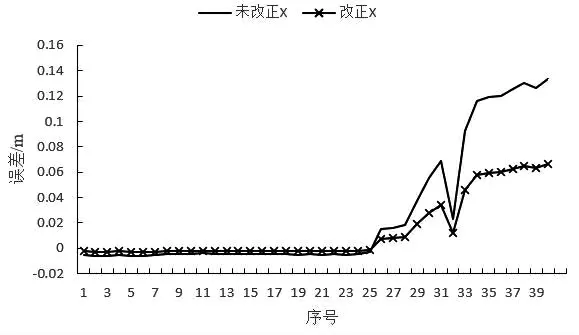
图1 X坐标误差
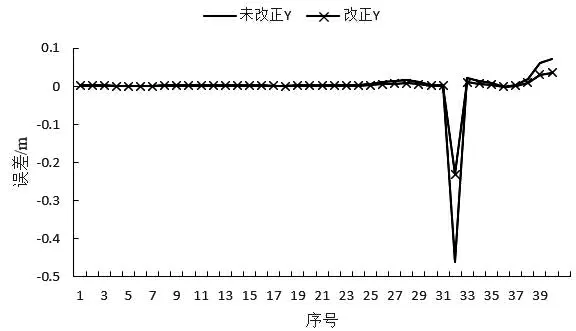
图2 Y坐标误差
为综合评价两次计算的误差效果,采用白塞尔公式计算观测值的中误差,结果(如表4所示):

表4 中误差
由表3可知:未改正的X坐标中误差为0.0574m,改正后的X坐标中误差为0.0287m;未改正的Y坐标中误差为0.0758m,改正后的Y坐标中误差为0.0379m,可知归算改正和投影改正对导线解算的坐标精度有一定程度的提高。
5.结束语
本文以长距离导线测量数据为例,分别计算未改正距离和距离改正后的控制网坐标平差精度,结果表明:当原始测量精度较高时,边长改正可以进一步提高观测精度,提高程度在50%以上;当原始测量精度较低时,边长改正仅能在一定程度上减小误差,但效果并不足以忽视该点的误差;未改正的X坐标中误差为0.0574m,改正后的X坐标中误差为0.0287m;未改正的Y坐标中误差为0.0758m,改正后的Y坐标中误差为0.0379m,说明归算改正和投影改正能有效地提高导线测量中的坐标解算精度,可以适用于实际工程案例提高测量精度。
