轨道式集装箱龙门起重机吊具抢锁故障原因与解决措施
2021-08-03樊承志
樊承志

作为港口集装箱起重机的主要部件之一,吊具使用频繁且所处作业环境复杂,是集装箱起重机的主要故障点,其中,吊具尚未到达适宜高度便开闭锁(俗称“抢锁”)是较为突出的故障,严重影响设备作业效率。本文以广州港股份有限公司南沙集装箱码头分公司(以下简称“南沙三期码头”)为例,分析轨道式集装箱龙门起重机(以下简称“轨道吊”)吊具抢锁故障原因并提出解决措施,以期提升设备作业稳定性,保障码头安全高效运营。
1 轨道吊吊具抢锁故障表现
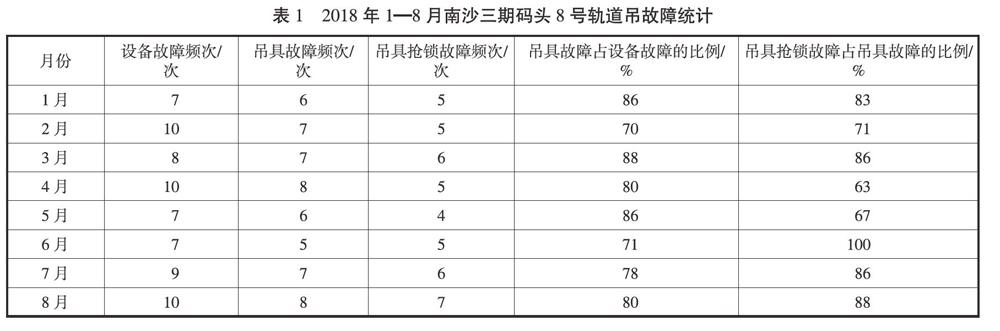
轨道吊吊具故障在轨道吊故障中的占比较高。由表1可见,2018年1―8月南沙三期码头8号轨道吊吊具故障在设备故障中的占比为70%以上,其中,吊具抢锁故障在吊具故障中的占比在60%以上;因此,有必要分析并解决吊具抢锁问题,以降低吊具故障率,提高轨道吊作业可靠性和作业效率。
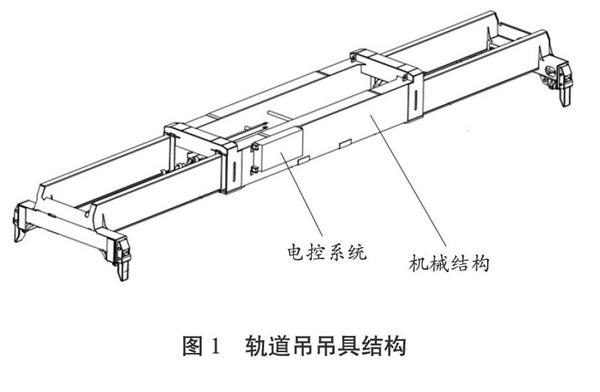
轨道吊吊具由机械结构和电控系统两部分组成(见图1),两者相互配合完成吊具动作,如吊具伸缩、吊具开闭锁等。从轨道吊吊具联锁结构(见图2)来看,吊具开闭锁动作涉及的联锁条件较多,吊具抢锁原因在于着箱限位没有到位,导致机械与电气联锁,从而使得锁头不能旋转到位;从设备操作人员的角度来看,吊具抢锁原因在于设备操作人员在开闭锁灯闪烁的瞬间便按下相应的指令按钮,而此时吊具并没有安放到位;从设备维护人员的角度来看,吊具抢锁原因在于设备操作人员在钢丝绳未放松、着箱灯没有常亮的情况下便执行开闭锁操作。吊具抢锁故障的处理方法虽然简单,但需要设备维护人员介入。吊具抢锁故障频发不仅影响轨道吊正常运行,降低设备作业效率,而且增加设备维护人员的工作量;因此,有必要分析吊具抢锁故障原因并根据实际情况实施技术改进。
2 轨道吊吊具抢锁故障原因
2.1 机械与电气联锁
目前,南沙三期码头轨道吊采用单箱吊具装卸20英尺和40英尺集装箱。吊具有4个锁头,通过锁头旋转实现开闭锁状态转换(见图3)。在吊具作业过程中,着箱顶销完全顶起,顶销限位全部到位,开闭锁限位得到感应后,才可执行开闭锁操作。着箱顶销与开闭锁旋转机构形成机械联锁,着箱限位与开闭锁限位形成电气联锁,从而从机械和电控程序两方面实现对吊具作业的双重保护。[1]
2.2 拖车减震系统
根据设备维护人员的现场统计,轨道吊吊具抢锁故障大多发生在堆场出箱作业过程中;因此,有必要分析和排查堆场出箱作业涉及的各种因素。对比堆场内作业与拖车上作业情况发现,拖车减震系统对吊具抢锁产生一定影响。拖车减震系统是一个弹性系统,当重物的重力未完全施加在拖车上时,拖车减震系统的变形量未达到最大。此时,钢丝绳对集装箱仍然有一定作用力,着箱顶销未到位,在吊具惯性力和拖车对集装箱支持力的作用下,着箱限位存在瞬间感应现象,从而引发吊具抢锁故障。
2.3 钢丝绳弹性变形
结合抓放箱工况,当轨道吊吊具重力等于集装箱支持力(即吊具不受钢丝绳拉力作用)时,吊具处于开闭锁条件的临界点。此时,钢丝绳的弹性特性使得吊具与集装箱的距离发生变化,加之吊具感应限位采用高灵敏度的接近限位,当感应距离处于临值时,设备微动会造成吊具开闭锁信号丢失,导致抓放箱是否达到开闭锁条件依赖于设备操作人员的技术水平。鉴于此,应当将吊具着箱和开闭锁等限位调整到位,避免其处在临界位置。此外,钢丝绳的弹性特性使得安装在卷筒上的起升编码器记录的起升高度与实际高度存在偏差,偏差大小取决于集装箱的质量和速度。结合抓放箱工况来看,钢丝绳的受力过程是一个复杂的变化过程,根据形变定义可知吊具抢锁故障与钢丝绳弹性变形息息相关。
2.4 吊具左右偏差
当轨道吊吊具出现左右偏差但没有超过程序报警设定值时,吊具钢丝绳一边处于放松状态,另一边处于拉紧状态,着箱信号处于临界状态。此时若设备操作人员误认为吊具满足开闭锁条件,便会造成吊具抢锁故障。
3 轨道吊吊具抢锁故障解决措施
针对造成轨道吊吊具抢锁故障的各种因素,综合分析设备操作人员作业情况发现,在着箱限位得到感应且钢丝绳达到放松状态时执行开闭锁操作,可以避免吊具抢锁问题。为此,须对轨道吊吊具系统实施电控程序和电路改造。
3.1 电控程序改造
将轨道吊吊具松绳限位信号与着箱信号串接,并以此作为满足着箱的必要条件,即着箱灯亮的条件是着箱限位得到感应且达到松绳状态(见图4)。由于吊具上架与吊具是可以分离的,其间安装2个串联的常闭接近限位,在吊架上呈中心对称分布,作为松绳状态信号反馈。当吊具上架的重力完全施加在吊具上时,接近限位失去信号,达到松绳的效果,该松绳信号比质量传感器的松绳信号更加稳定、可靠。
在电控程序中,分别输入着箱限位形成不同的中间变量后再串联,输入信号串联后得到的中间变量为松绳限位。为了简化程序,只在1个着箱限位输入信号里串接松绳限位中间变量便可以达到改进要求。根据现场实际测试,当着箱灯亮的时候,松绳并不会过量,符合设备作业要求。
3.2 电路改造
由于松绳限位与吊具采用不同的通信方式,吊具信号处理器是独立的。为了使吊具上的信号灯系统与电控程序一致,增设继电器。将继电器线圈与松绳限位线路串接,将继电器的常闭点与着箱灯线路串接(见图5),从而达到简化操作的效果。
4 轨道吊吊具抢锁故障解决措施实施效果
对比南沙三期码头8号轨道吊改造前后吊具抢锁故障统计数据(见表2)可见,经电控程序和电路改造后,轨道吊吊具抢锁故障频次明显降低。
5 结束语
经电控程序和电路改造后,轨道吊吊具抢锁故障减少70%以上,可见该改造方案有助于减少吊具抢锁故障。后期可以将该改造方案推广应用到集装箱码头其他吊机吊具系统优化,以降低吊具故障率,提高设备作业稳定性,保障码头正常生产作业。
参考文献:
[1] 吴伟明. 集装箱吊具开闭锁机构各系统常见故障 [J]. 集装箱化,2008,19(11):18-20.
(編辑:曹莉琼 收稿日期:2021-02-23)
