着水初始条件对水陆两栖飞机着水性能的影响
2021-08-03卢昱锦肖天航邓双厚支豪林朱震浩陆召严
卢昱锦,肖天航,邓双厚,支豪林,朱震浩,陆召严
南京航空航天大学 航空学院 飞行器先进设计技术国防重点学科实验室,南京 210016
水陆两栖飞机是一种既能实现水面起降,又拥有陆地起降能力的固定翼飞机[1-3],其独特的任务能力使它在世界航空发展史上始终处于一个特殊地位。水陆两栖特性应用场景十分广泛,不仅可以用于森林灭火和水上救援,还可以完成海洋环境监测、近远海巡逻和战略物资运输等任务[4]。正因为其执行任务环境复杂多变,事故率比常规飞行器高,而数据表明超过90%的水上事故发生在起降阶段[1],这使水陆两栖飞机水面起降性能的研究尤为重要。
水陆两栖飞机起降过程伴随着复杂的流场运动,很难以理论计算的方法准确求解[5];水池试验[6-10]则受限于尺度效应和试验周期长等因素,目前主要用于确定运动稳定边界和基本参数的影响。相比之下,计算流体力学技术的发展尤其是两相流数值求解方法的逐步完善,使得更多的学者借助数值模拟的方法研究水陆两栖飞机起降过程。段旭鹏等[11-12]基于OpenFOAM发展的动态激励盘两相流计算方法研究单断阶高速滑行瞬时状态气动力和水动力特性,并讨论无动力无滑流、无动力有滑流和有动力有滑流并附加平尾操纵力3种状态下飞机的运动规律。对于水陆两栖飞机波浪水面降落的研究,马增辉等[13]采用任意拉格朗日欧拉(Arbitrary Lagrangian-Eulerian,ALE)法及罚函数流固耦合方法讨论了不同波浪参数(波高和波长)对飞机耐波性能的影响,并对飞机纵摇、升沉和机艏机艉过载做了分析,其中飞机的气动力通过集中力载荷曲线施加在数值计算模型中。为排除气动力和水面效应引起的试验和仿真差异,孙丰等[14]利用LS-DYNA研究了不同姿态角下单船身模型的着水性能,分析了船体底部压力、机体加速度和姿态角的变化,研究结果与试验结果有较高的一致性。Qiu和Song[15-16]则对离水特性展开研究,提出了一种将气动力和水动力分开计算的解耦式算法,气动力由全机构型计算求得并充分考虑地效作用,水动力则用船体机身为模型单独求解。起飞离水过程被分解为多个时间小步,通过求解刚体运动学方程得到下一时间步的输入运动参数,进而迭代计算直到满足起飞条件。
目前利用数值仿真方法对水陆两栖飞机离着水特性的研究大致可以分为两类:一类为分析外部影响因素对飞机气动力和水动力的影响,如螺旋桨滑流、水面状况等;另一类则是考虑飞机水动外形及飞行状态等对飞机着水载荷和运动响应的影响。其中,着水初始条件直接关系到飞机着水后受力以及能否迅速进入稳定区域,因此着水初始条件的确定显得尤为重要,目前关于这方面的研究仍不够深入,尚待完善。本文将运用一种基于有限体积法的ALE数值仿真方法[17]对某型水陆两栖飞机静水面降落过程展开数值模拟,着重讨论初始俯仰角、下降和前飞速度这3个初始条件对着水性能的影响。着水性能的评价则主要依据驾驶舱及重心加速度、气动力和水动力载荷响应等,通过比较分析确定较优的着水初始条件。希望能通过上述计算分析为船身式水陆两栖飞机离着水问题的研究提供参考和技术支持。
1 数值计算方法
1.1 流体控制方程及求解
流体控制方程为非定常三维雷诺平均不可压缩Navier-Stokes(N-S)方程,湍流模型采用标准k-ω两方程模型。压力-速度耦合求解利用SIMPLE(Semi-Implict Method for Pressure-Linked Equations)算法,流场梯度由格林高斯法构建,使用有限体积法离散控制方程:压力项选用PRESTO!格式离散,体积分数项利用修正的高分辨率界面捕捉方法(mHRIC),其余项均采用二阶迎风格式离散。
1.2 自由液面处理
水陆两栖飞机着水时机体附近水体易发生喷溅与变形,为高效捕捉自由液面变化,提高机体受力求解精度,采用流体体积分数法[18](Volume of Fluid,VOF)捕捉两相流交界面。其原理是每个网格单元中定义一个体积分数αq,表示目标流体体积Vq与所在网格单元体积Vi的比值,通过求解该比值连续性方程确定交界面位置:
(1)
式中:t为时间变量;vq为目标流体速度。对某个网格单元而言,假设目标流体在单元中的体积分数为αq,那么当αq=0时,该网格单元中无目标流体存在;当αq=1时,目标流体充满该网格单元;当0<αq<1时,在该网格单元中存在交界面。数值模拟过程中流场网格随机体运动,为保证边界处自由液面始终保持初始高度,需对边界施加合理的体积分数自定义函数。该边界条件以欧拉坐标系为参考,当网格坐标高于初始水面高度,指定空气体积分数αa=1,低于则αa=0。
1.3 边界条件与网格划分策略
数值模拟只考虑飞机升沉、俯仰和前飞三自由度的运动,为节省计算成本采用半模计算。参照机体坐标系,计算域的前、上、下边界采用速度入口边界条件,后边界为压力出口边界条件,两侧采用对称面边界条件;计算域尺寸为6L0×2L0×5L0(L0为机身长度),如图1所示。
流场域网格采用多级多区域划分策略适应大俯仰角运动,如图1所示。根据粗网格预估飞机运动姿态范围,将流场网格分为3个加密区域:① 机 体受力直接影响飞机运动特性,需要提高机体附近流场求解精度和自由液面捕捉精度,因此机体附近是一级加密区域,网格高度为0.005L0;② 机体前部随俯仰运动自由液面扫掠区域呈扇形,该区域网格也采用扇形轮廓区进行加密,由于离机体较远,此区域为二级加密区,网格高度为0.010L0;③ 机体后部同样存在扇形区,此区域自由液面变化不再是关注重点,在充分保证水面捕捉精度和求解收敛的前提下网格尺寸适当增大,采用0.015L0作为该区域网格高度。
利用上述网格划分方法不仅可以避免传统矩形加密区域对姿态变化的不适应,一定程度上还能节省网格量,提高计算效率。另外,对于流场网格、自由液面和飞机的运动关系,运用基于有限体积法的ALE方法[19]处理飞机与水面相对运动,流场网格随飞机运动且网格不变形。因前期研究[20-21]已详细阐述,对该网格运动方式的介绍不再赘述。计算网格采用对自由液面适应性较好的笛卡尔网格,总网格量为1 200万。
1.4 载荷参数定义
图2为运动分析中涉及的力和加速度等运动参数正方向指示说明,其中:Fx和Fz分别为飞机受水平方向和垂向力;L和D分别为升力和阻力;下标a和w分别表示空气和水;vx和vz分别为飞机水平飞行速度和下降速度。另外,为研究水陆两栖飞机在水面降落过程中驾驶舱承受的过载情况,通过式(2)得到驾驶舱加速度:
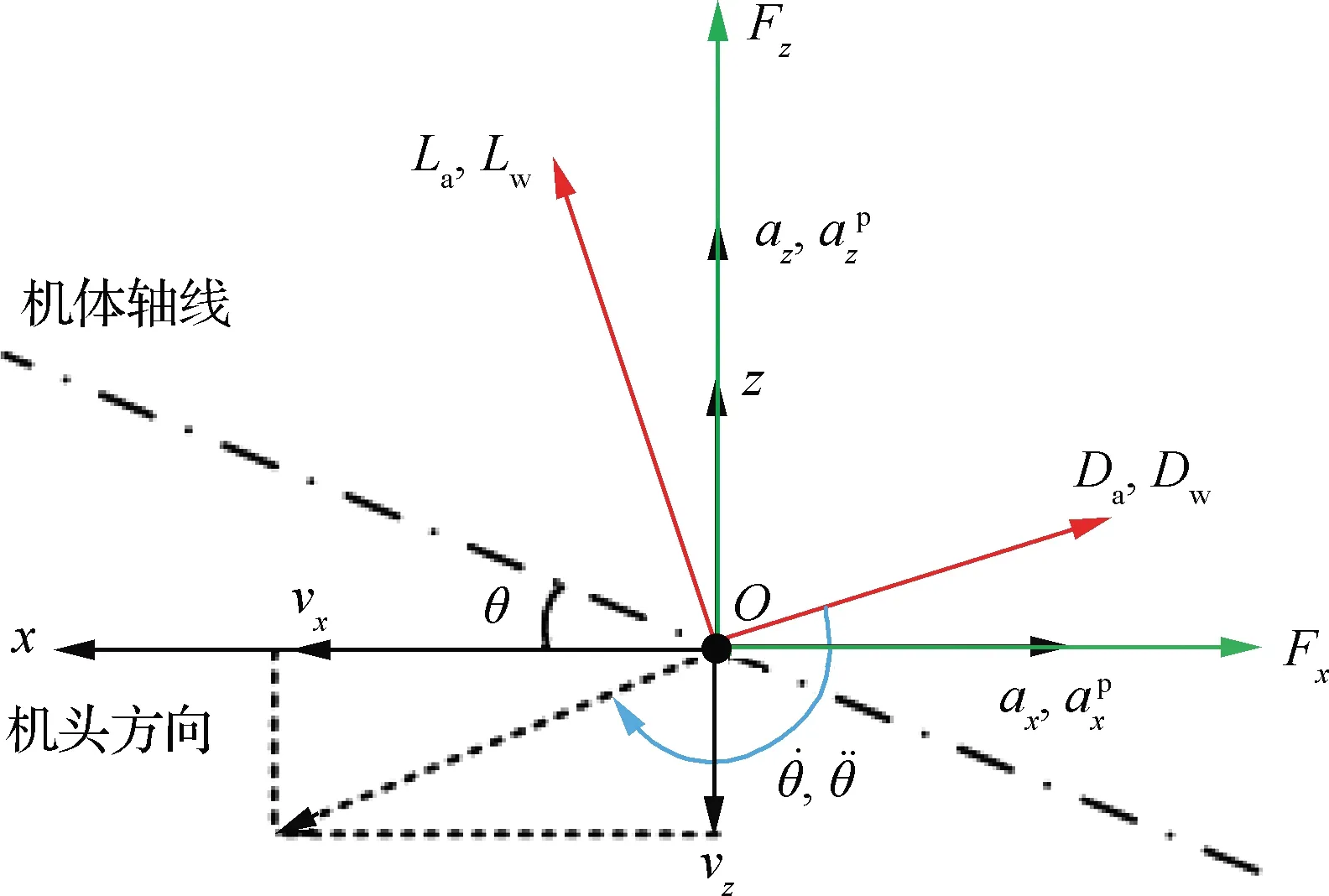
图2 正方向示意

(2)

利用数值模拟的优势监测气动部件(机翼和尾翼)受力,分析着水过程中气动力和水动力时历变化。两栖飞机着水过程中气动部件未触水,故忽略气动部件的水动力;船体机身主要受水动力影响,将气动力包括在水动力监测中。对全机受力与气动部件受力做减运算,得到船体机身水动力即全机水动力(包括静浮力):
Fw=Ft-Fa
(3)

(4)
式中:Da和La分别为气动阻力和升力;Dt和Lt分别为总阻力和总升力。
2 算例验证
为验证数值方法和网格运动方式在研究入水冲击问题时的计算准确度,采用文献[22]中的非对称锲形体垂直入水进行算例验证。试验所用模型横截面如图3所示,斜升角β为20°,底边长0.61 m。试验中模型以顺时针旋转5°、最低点距水面距离0.61 m作为初始条件自由释放。

图3 楔形体横截面
为节省计算时间,数值模拟中锲形体在0时刻位于水面上方,顶点距离水面5 mm,依据自由落体运动规律求得初始垂向速度为3.459 5 m/s。计算域及网格划分如图4所示,计算域长6 m、高6 m,网格最小尺寸为0.000 2 m,最大尺寸为0.03 m。

图4 计算域和网格
图5给出了非对称楔形体垂直入水过程z向加速度和角加速度的数值模拟结果与试验数据[22]的比较情况。可以看出,虽然试验模型为六自由度运动而数值模拟采用二维模型的三自由度进行运动仿真,但数值模拟结果与试验值吻合较好,变化趋势和幅值都保持了较好的一致性,误差较小。

图5 垂向加速度和角加速度试验值与模拟值对比
3 计算结果及分析
利用第1节介绍的建模和数值仿真方法,对新一代涡扇动力水陆两栖飞机静水面着水性能进行数值仿真研究,考察初始条件对运动姿态、载荷响应等的影响规律。
3.1 初始俯仰角对着水特性的影响


表1 垂向加速度峰值对比

图6 不同初始俯仰角加速度随时间变化
此外,着水时机体加速度峰值对结构承受能力的影响也值得关注。由图6(a)可知,θ0为3°、5°和7°时峰值过载个数分别为3个、2个、1个,单论峰值个数,7°工况表现更佳。特别地,对比发现3种工况初始过载数值都很接近,但二次过载则不同。θ0=5°时,峰值1和峰值2接近;但θ0=3°工况则不同,峰值1和峰值3接近,峰值2明显大于两者。θ0=3°时,峰值2发生之前飞机在水面发生了一个小的跳跃再次着水,而峰值3发生时船体机身未完全离水,使得峰值2时刻飞机水动升力高于其他两个时刻,如图7所示。结果表明,改变初始姿态角对首次触水加速度影响不大,但随后若飞机运动不稳定产生跳跃,较小的初始姿态角则会导致船体经历比首次触水更高的过载。

图7 θ0=3°工况二次着水过程


图8 θ0=3°工况角加速度与驾驶舱加速度随时间变化

表2 θ0=3°工况角加速度极值时对应的加速度值

图9 θ0=3°工况角加速度经历第1个峰值运动过程和底面压强分布

图10 θ0=3°工况角加速度经历第1个谷值运动过程和底面压强分布
3.2 垂向下降速度对着水特性的影响

图11 不同下降速度加速度时历变化(vx=35.0 m/s)

图12 加速度与下降速度关系
(5)
文献[23]分析总结了楔形体垂直入水的冲击力峰值Fmax与垂向速度的关系:
(6)


图13为3个工况加速度峰值时刻底面压强分布云图,第1个工况底面状况明显不同于其余工况,下降速度快,着水时间短则飞机低头时间减少,飞机着水姿态角偏大,吃水深度增加。机体水动力受吃水深度和姿态角影响,较大的姿态角和吃水深度使机体底部后体滑行面更易被水体喷溅,导致水动力增加。vz=3.0 m/s工况除了断阶前后体存在高压和负压区外,艉部还有一处负压区,机身后段触水形成双断阶滑水;另两个工况飞机处于单断阶滑行状态,机身后段未触水。
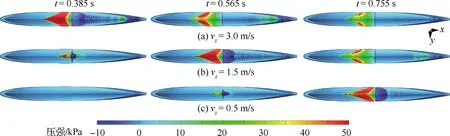
图13 不同着水工况底面压强分布
对于不同初始下降速度,该型水陆两栖飞机加速度演变趋势基本一致,过载峰值时刻机身底部压强分布没有较大差异。此外,加速度峰值随初始下降速度的递减而减小,值得注意的是重心处垂向加速度峰值与下降速度平方值存在线性变化关系,而驾驶舱垂向加速度峰值在一个合理下降速度区间内数值差别相对较小。
3.3 前飞速度对着水特性的影响
参照《飞机设计手册》中关于水上飞机降落着水速度vLa定义:

(7)
式中:G0为飞机着水重力;ρ为空气密度;S为机翼面积;CL为着水对应机翼迎角的升力系数。计算得到该型水陆两栖飞机水面降落着水前飞速度和初始过载分别为36.276 m/s和-0.12g。在此着水速度附近,取35 m/s、36 m/s、37 m/s和40 m/s的前飞速度考察前飞速度对着水特性的影响,对应初始过载分别为-0.18g、-0.13g、-0.08g和0.07g。飞机初始俯仰角设定为7°,下降速度为0.5 m/s。
图14为4种工况加速度时历变化过程,触水前,飞机重力作用稍大于气动升力,机体加速度垂直向下;触水后,因水和空气的密度差极大,水动力作用显著,机体在短时间内获得较大垂直向上加速度。水平方向方面,飞机在着水前因气动阻力和飞行速度共同作用使得沿来流方向加速度逐渐减小,但当机体触水后水动阻力迅速增大,导致机体再次获得较大加速度。总的来说,与初始下降速度对加速度影响不同,改变初始前飞速度vx,各工况加速度无论是数值变化范围还是时历变化趋势都基本一致,可知前飞速度对加速度变化影响较弱。
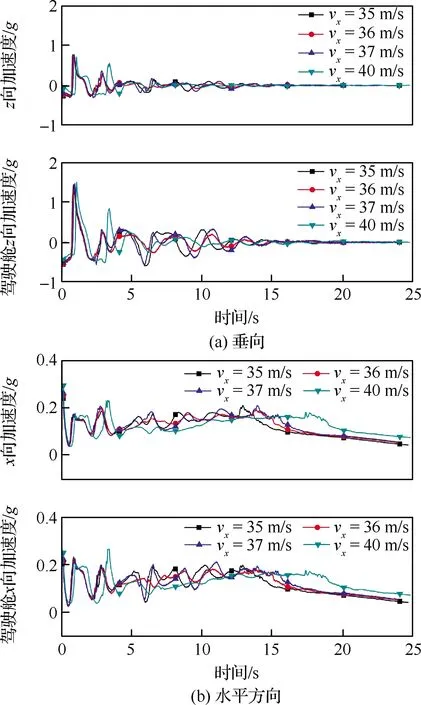
图14 加速度随水平飞行速度变化(vz=0.5 m/s)
水陆两栖飞机水上起飞时将速度范围划分为4个阶段:航行段(0.25vta以下,vta为起飞离水速度)、过渡段(0.25vta~0.50vta)、滑行段(0.50vta~0.80vta)和起飞段(0.80vta~1.00vta)。着水过程可以认为是水上起飞的逆过程[25],参照着水速度经验公式分为着水段(0.80vLa以上)、滑行段(0.80vLa~0.50vLa)、过渡段(0.50vLa~0.25vLa)和排水航行段(0.25vLa以下)。
图15为上述4个工况水动力与合力在垂向和水平方向上随水平飞行速度变化过程。图16为各工况俯仰角和垂向位移变化曲线。从曲线总体趋势看,着水段水动力变化剧烈引起飞机姿态角变化和升沉运动,进入滑行段后,因飞行速度降低,飞机各项力学特性逐渐趋于稳定。对于着水段,随飞行速度减小,飞机气动力作用减小,水动力逐渐增大。气动力和水动力在该时段存在波动主要是因为数值模拟没有考虑发动机推力和平尾力矩配平,水动力作用点前后移动造成运动不稳定,故着水段应加强姿态控制[5],避免这一现象发生。进入滑行段,随着速度进一步降低,船体吃水深度增加,断阶后体滑行面积增大,机体俯仰角达到最大值,水动阻力和升力有所提升。期间气动升力占比与飞行速度大致呈线性关系,气动阻力占比小于20%且不断减小。过渡段水阻力出现阻力峰,相同时刻俯仰角也有峰值出现。随着飞行速度降低,艉部低压逐渐消失,船体俯仰角与水阻力迅速减小,飞机进入低速排水航行段。气动阻力占比曲线在该阶段有一个短时提高(如图15(a)所示18~15 m/s速度段),其原因是,吃水深度和襟翼偏角的增加使襟翼受到水体喷溅的影响而产生局部高压(如图17所示),导致机翼阻力增大。气动升力与阻力占比在飞机进入排水航行段趋向于0,水动升力也趋近于飞机自身重力达到平衡状态。

图15 水动力以及合力随水平飞行速度变化(vz=0.5 m/s)
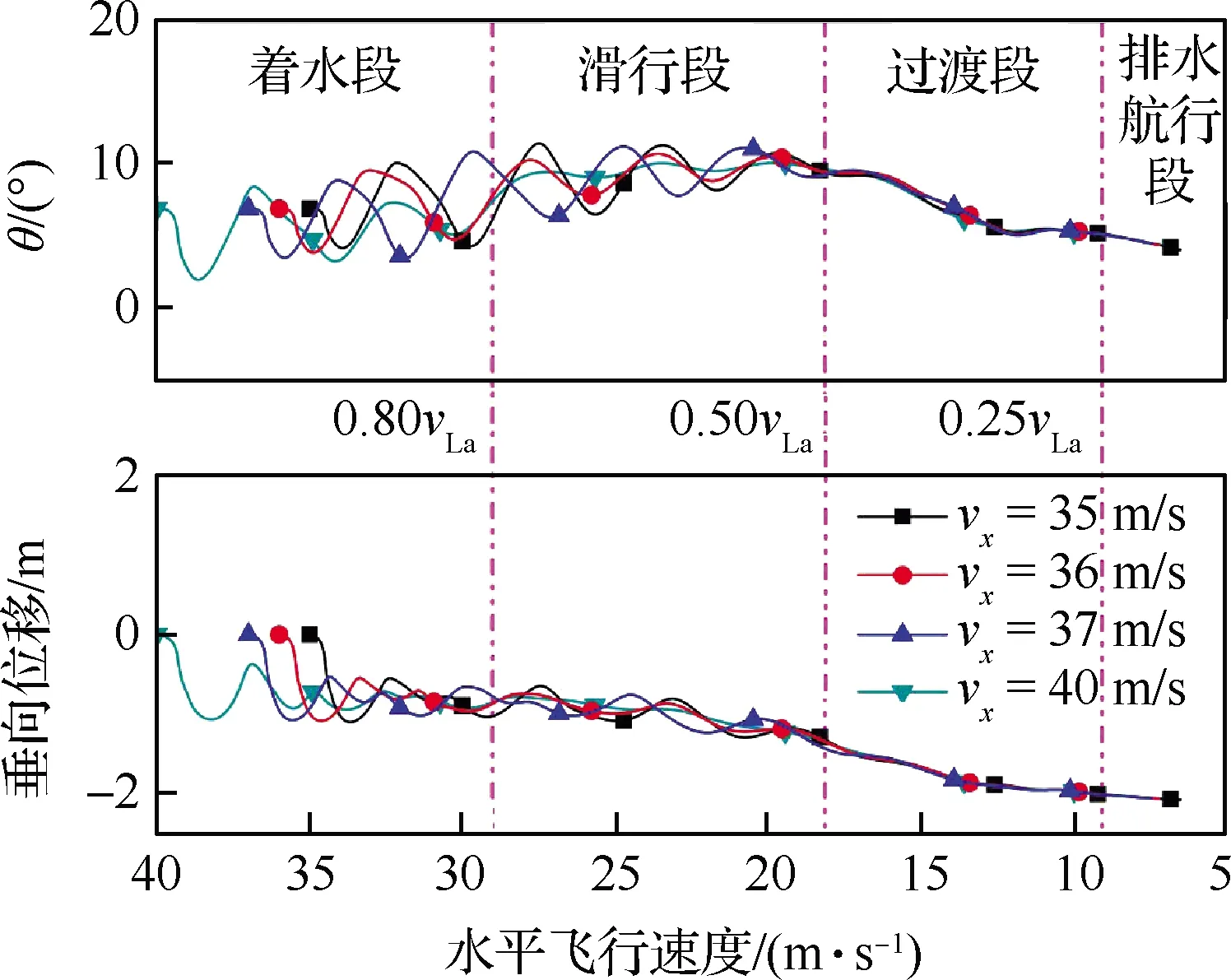
图16 姿态角和垂向位移随水平飞行速度变化(vz=0.5 m/s)

图17 襟翼局部高压
对比可知,着水段4个工况都有不稳定运动产生,进入滑行阶段后vx=40 m/s工况俯仰角振荡较为平缓,垂向位移仅小幅波动。从受力看,40 m/s 工况水动阻力和水动升力变化也更为平缓,垂向合力在着水段后期就已经收敛趋近于0。由此可见,对该型水陆两栖飞机无动力水面降落而言,40 m/s初始前飞速度是最佳选择,此时飞机气动升力略大于重力。
4 结 论
使用基于有限体积法的ALE方法对水陆两栖飞机静水面降落过程展开数值仿真,探讨初始姿态角、下降速度和前飞速度3个初始条件对飞机着水性能影响,获得最佳初始条件,得到了如下结论:
1)计算结果表明,虽然初始姿态角增大对首次触水过载影响较弱,但大的初始姿态角有利于减缓后续运动中飞机重心和驾驶舱位置过载。若飞机运动不稳定产生“跳跃”,较小的初始姿态角会导致船体经历比首次触水更高的过载。
2)下降速度越大,两栖飞机水面降落冲击载荷越大,导致各位置过载增大。驾驶舱与重心位置的水平和垂向过载首个峰值随初始下降速度降低而减小。此外,研究发现重心处垂向加速度值与初始下降速度的平方值存在线性变化规律,而驾驶舱垂向加速度值在下降速度1.0 m/s附近出现极小值。对于常规船身式水陆两栖飞机而言,推断重心垂向加速度与下降速度的平方同样存在一线性关系。
3)前飞速度决定两栖飞机着水初始过载,较小的前飞速度会产生较大负过载,导致飞机在着水过程中更易发生运动不稳定。着水前初始过载不宜过大,气动升力略大于重力,两栖飞机方可获得更佳的水载荷环境,不同降落段升沉和俯仰也更加稳定。
4)由于数值模拟未计及发动机推力和俯仰操纵,飞机在着水段运动非常不稳定,后期考虑加入驾驶员模型控制着水姿态变化,使飞机在稳定边界范围运动,也更加贴近于真实情况。
