轨道动静结合快速检测多源数据采集模块设计
2021-08-02陈小宇武瑞宏任晓春
陈小宇 ,汪 歆 ,武瑞宏 ,任晓春 ,邓 川
(1.华中师范大学 物理科学与技术学院,湖北 武汉 430079;2.中铁第一勘察设计院集团有限公司,陕西 西安 710043)
0 引言
多源异构数据的高精度同步采集是轨道动静结合检测系统中的关键技术之一[1-3]。轨道动静结合检测系统是以惯性测量系统为核心测量单元,并辅以全站仪、GPS、轨距、倾角、里程计、轨枕识别等多类高精度传感器,实现铁路轨道几何尺寸的快速检测。随着高铁的迅猛发展,列车的速度不断提高,在列车提速的同时,会对铁轨造成更大的伤害,铁路轨道会发生形变、磨耗等现象,而轨道结构的各个部件产生的形变都会直接或间接影响列车运营的平稳性和安全性[4-9]。由于轨道动静结合快速检测系统的动态测量模式,测量速率快,采样频率高,大量多源数据需要同步采集、处理与存储,并实时上传至控制中心,用于后续综合解算,因此,对多源数据采集模块提出了更高的性能需求[10]。针对上述问题,本文设计了一套轨道动静结合快速检测多源数据采集模块,该模块以FPGA 为主控芯片,利用高稳晶振、结合GPS 输出的PPS 脉冲建立高精度时间基准,通过控制AD 采样频率实现位移传感器、温度传感器、激光位移传感器等多传感器数据的高精度实时同步采集[11-12],将采集的数据通过USB 实时传输至Jetson TX2[13],进行融合处理后,实现铁轨几何尺寸、形变及磨损的快速检测。
1 总体设计方案
总体设计框图如图1 所示。为减小体积、便于安装和维护,将整个系统分为FPGA 核心板、接口板、GPS 转接板和电源板四个子模块。FPGA 核心板采用Xilinx 公司的Artix-7 系列FPGA 为主控制芯片[14-15],通过高稳晶振和GPS 转接板输出的PPS 脉冲和NEMA 数据建立高精度时间基准,充分发挥FPGA 高速并行的优势,实现对接口板上惯导、编码器、位移传感器、温度传感器、激光位移传感器等多传感器数据同步采集控制;并以NVIDIA 公司的Jetson TX2 作为数据处理融合中心,TX2通过千兆网接口可以与上位机通信,接收上位机发送的控制指令,通过串口与FPGA 核心板上的FPGA 芯片通信,FPGA 同步采集的各个传感器数据通过USB 传输模块上传至TX2,进行数据的处理、融合和存储;电源板上集成高效率的DC/DC 转换模块和电源转换芯片,实现高效电源转换,可以为各个模块提供供电电源,为整个系统稳定运行提供保障。
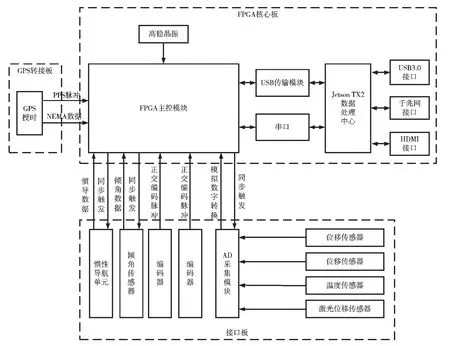
图1 系统总体设计框图
2 系统硬件核心电路设计
2.1 FPGA 核心板设计
FPGA 核心板框图如图2 所示,作为整个轨道动静结合快速检测多源数据采集系统的核心部件,该子模块主要完成千兆网、USB 3.0、HDMI 等高速信号接口的处理、A/D 转换控制及数据传输、高精度时间基准建立、IMU 数据同步采集[16]、编码器数据同步采集等核心任务,通过接插件与接口板对扣连接。
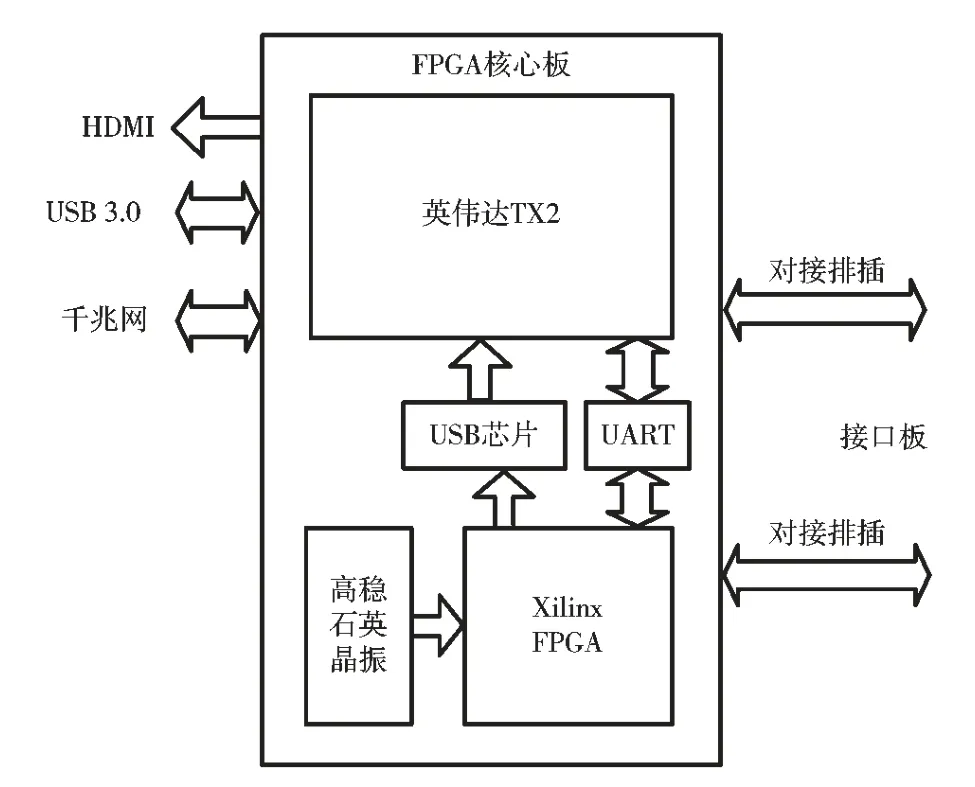
图2 FPGA 核心板框图
2.1.1 主控芯片的选型
选择Xilinx 公司的Artix-7 系列FPGA 作为主控芯片,该芯片提供了行业最低的系统成本和功耗,Artix-7 器件在单个成本优化的FPGA 中提供了最高性能功耗比结构、收发器线速、DSP 处理能力以及AMS 集成。综合考虑逻辑数量、I/O 口数量、RAM 数量、乘法器数量、封装、功耗要求以及供货渠道与价格因素,选择XC7A35T-1CSG324I 型号作为主控芯片,该型号在多种通用逻辑和DSP 应用中优化实现了最低成本和功耗,满足设计要求。该芯片详细参数如表1 所示。
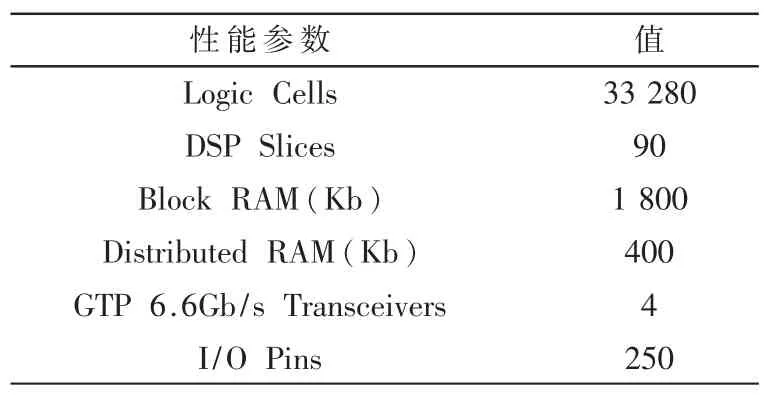
表1 FPGA 性能参数信息表
2.1.2 时间基准的建立
由于高稳晶振短期稳定性好,GPS 输出的PPS 秒脉冲长期精度高,采用GPS 输出的PPS 脉冲对高温晶振进行驯化,建立高精度的时间基准。系统的晶振电路图如图3 所示。高稳石英晶振所选型号为7N-10.000MBP,频率为10 MHz,其频率稳定误差20 年内稳定在±4.6 ppm。
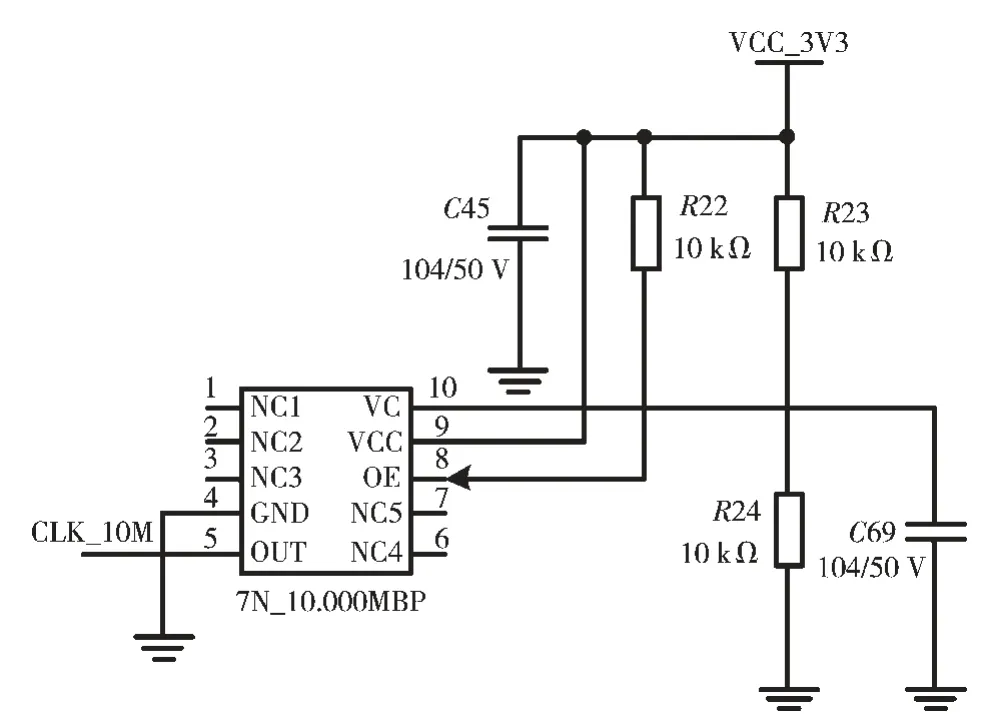
图3 晶振电路图
采用DS1302 为模块提供初始时间,其电路如图4所示。
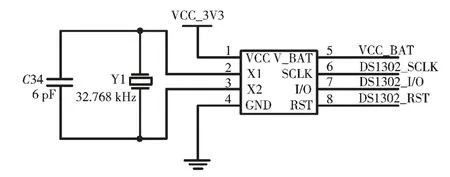
图4 计时芯片电路图
启动时,读取DS1302 的时间作为系统初始时间,外部高稳石英晶振的输出信号被FPGA 中的锁相环捕捉,FPGA 将对信号进行累加作为系统的参考时钟,同时抓取GPS 输出的PPS 脉冲信号上升沿作为绝对整秒的开始,在连续检测到两个PPS 脉冲时,将上一PPS 对应时间加一秒进行授时,同时清零FPGA 内部累加计数器,这样保证了FPGA 内部脉冲与GPS 的PPS 秒脉冲信号边沿对齐,实现两者的时间统一。在GPS 信号稳定时,FPGA 通过串口接收并解析GPS 的GPRMC 格式数据包,每隔半小时将解析出的时间信息写入DS1302 中,确保下次系统启动时初始时间的准确性。
2.2 接口板设计
接口板如框图5 所示,接口板作为FPGA 核心板和传感器连接的中间部件,主要完成各传感器数据信号调理、电平转换、A/D 转换等功能,并将转换后的信号通过两排排插连接至FPGA 核心板的FPGA 芯片,由FPGA 芯片根据设定的时间间隔,完成各传感器数据的同步采集。
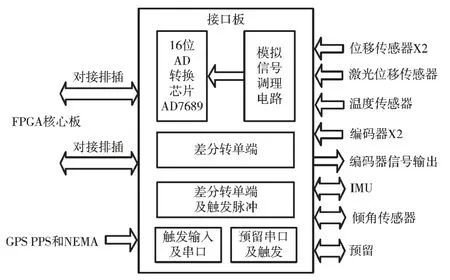
图5 接口板框图
2.2.1 ADC 采集模块
位移传感器、激光位移传感器和温度传感器的输出信号经信号调理电路后送入AD7689,AD7689 是16 位4/8通道的电荷再分配逐次逼近寄存器型(SAR)模数转换器,采用单电源VDD 供电,吞吐速率为250 kS/s。AD7689 使用SPI 接口实现配置寄存器的写入和转换结果的接收,SPI 接口使用单独的电源VIO,它被设定为主机逻辑电平,其功耗与吞吐速率成正比。FPGA 通过该芯片采集位移传感器、激光位移传感器和温度传感器的数据。其电路设计如图6 所示。
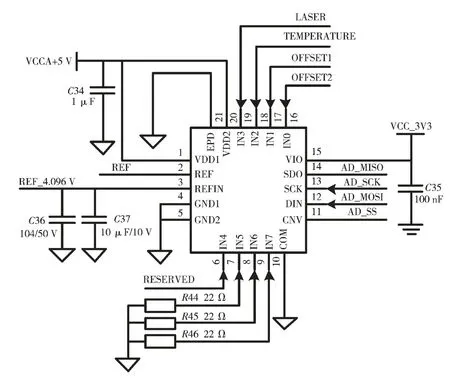
图6 ADC 数据采集转换电路
2.2.2 传感器信号调理电路
由于位移传感器、激光位移传感器和温度传感器输出模拟信号的幅值可能各不相同,而AD7689 可接受输入的电压范围为0~4.096 V,因此上述传感器输出的模拟信号不能直接输入至A/D 转换芯片,需要将这些模拟信号通过信号调理电路调理为A/D 可接受的模拟信号输入并保证这些模拟信号幅值的统一。图7 所示为某一路位移传感器的信号调理电路。
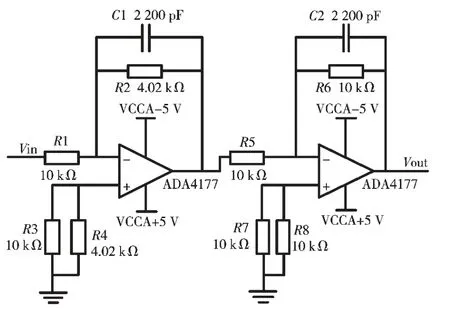
图7 位移传感器信号调理电路
2.2.3 USB 电路设计
采用CY7C68013 芯片作为USB 传输控制芯片,FPGA 通过16 位并行接口与该芯片连接,将采集的多传感器同步数据转成USB 协议后,传输至TX2。电路如图8 所示。
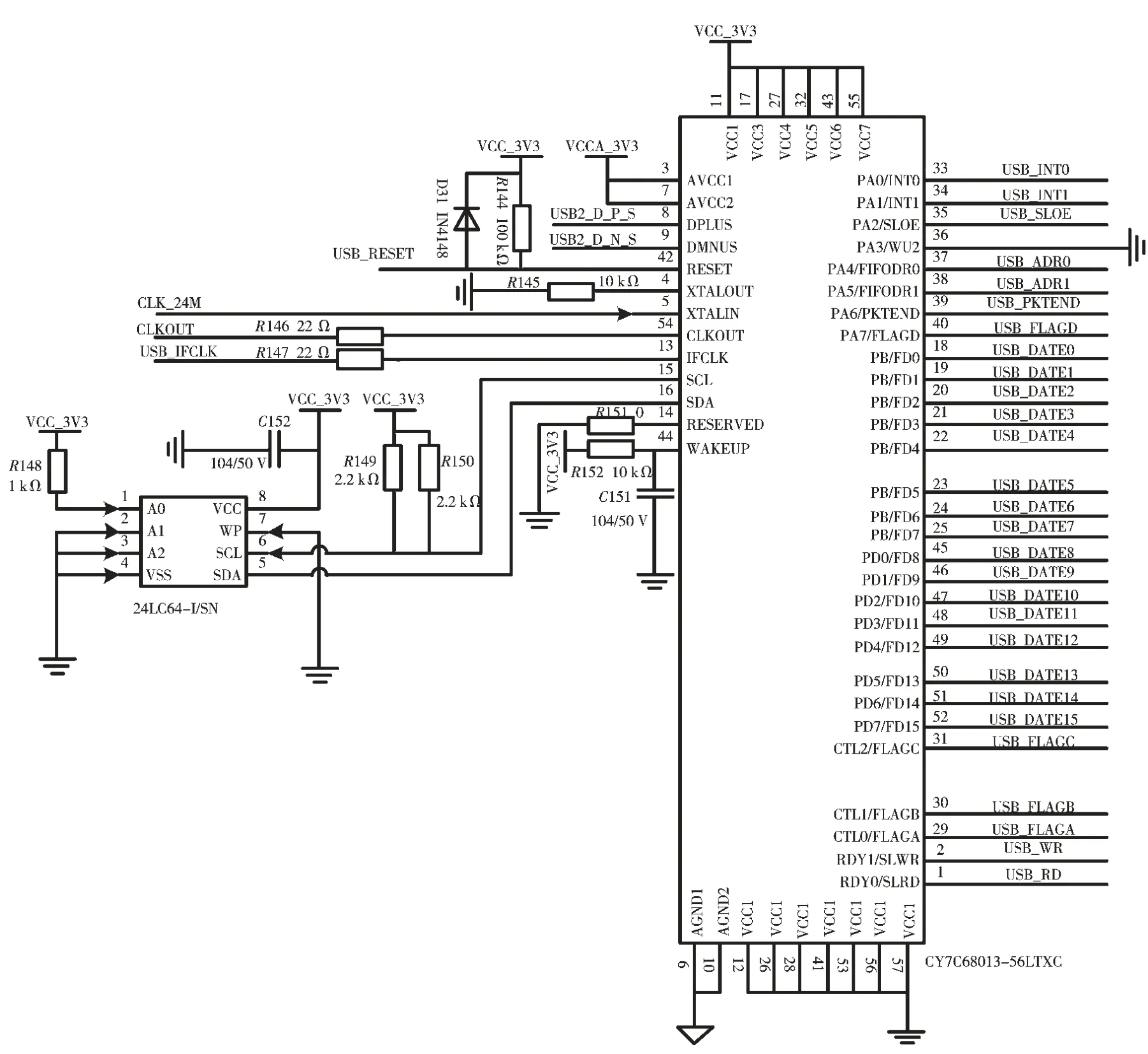
图8 USB 电路设计原理图
2.3 GPS 转接板设计
GPS 板卡电路设计如图9 所示。
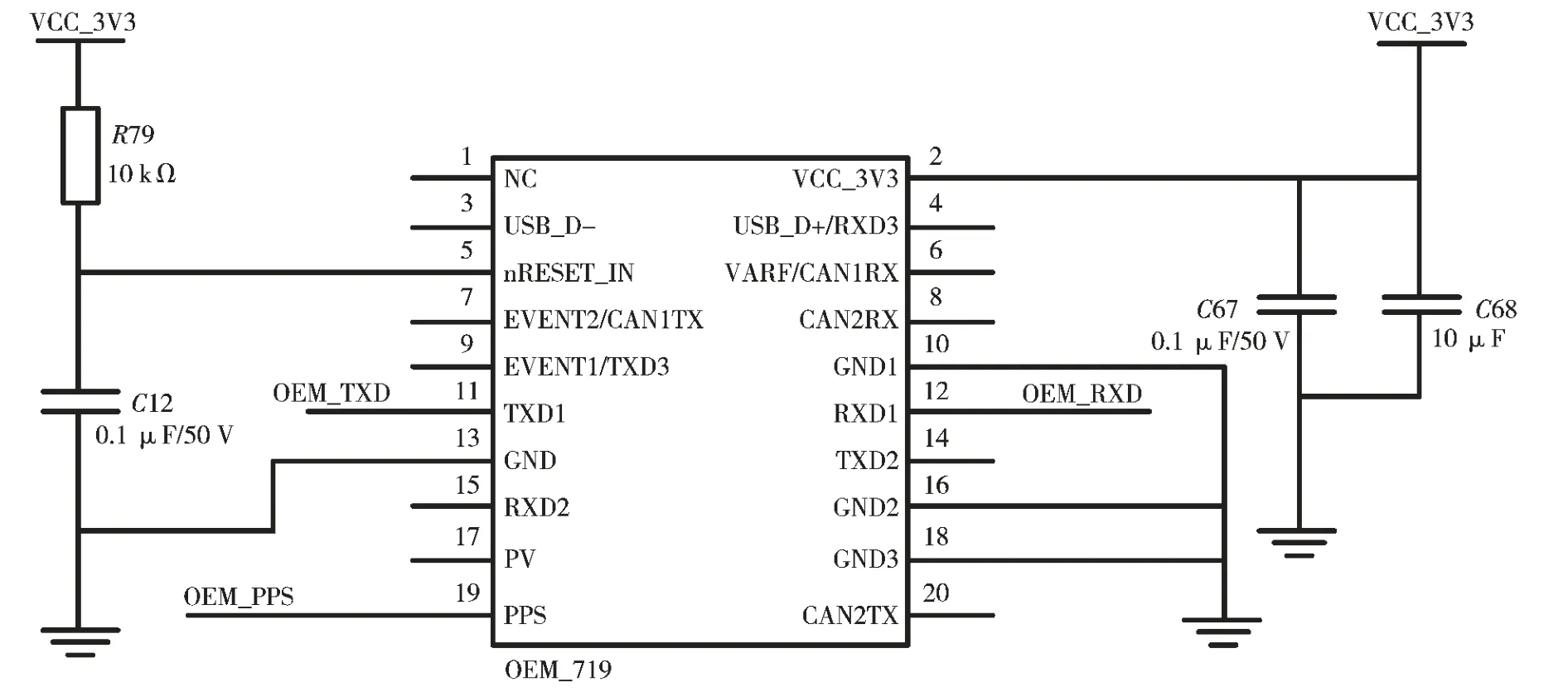
图9 GPS 板卡电路图
其功能是将GPS模块安装在该电路板上,并且完成GPS模块输出的PPS 信号和NEMA 信号的电平转换,FPGA 通过接口板与PPS 和UART 口连接,读取GPS 的NEMA 数据,结合PPS 信号和高稳石英晶振,在FPGA 内部建立高精度的时间基准。
2.4 电源板设计
电源板框图如图10 所示,其功能是接收+12 V电源输入,通过电源转换模块和电源转换芯片,变换出多路+24 V、+12 V、+5 V 电源,为各子模块和传感器提供可靠的供电电源。

图10 电源板框图
3 FPGA 软件设计
3.1 FPGA 主控制模块程序设计
FPGA 采用Xilinx 公司的Artix-7 系列芯片XC7A35T-1CSG324I,开发环境为Xilinx 的Vivado,FPGA 程序框图如图11 所示。整个程序采用Verilog HDL 语言开发,采用模块化设计。
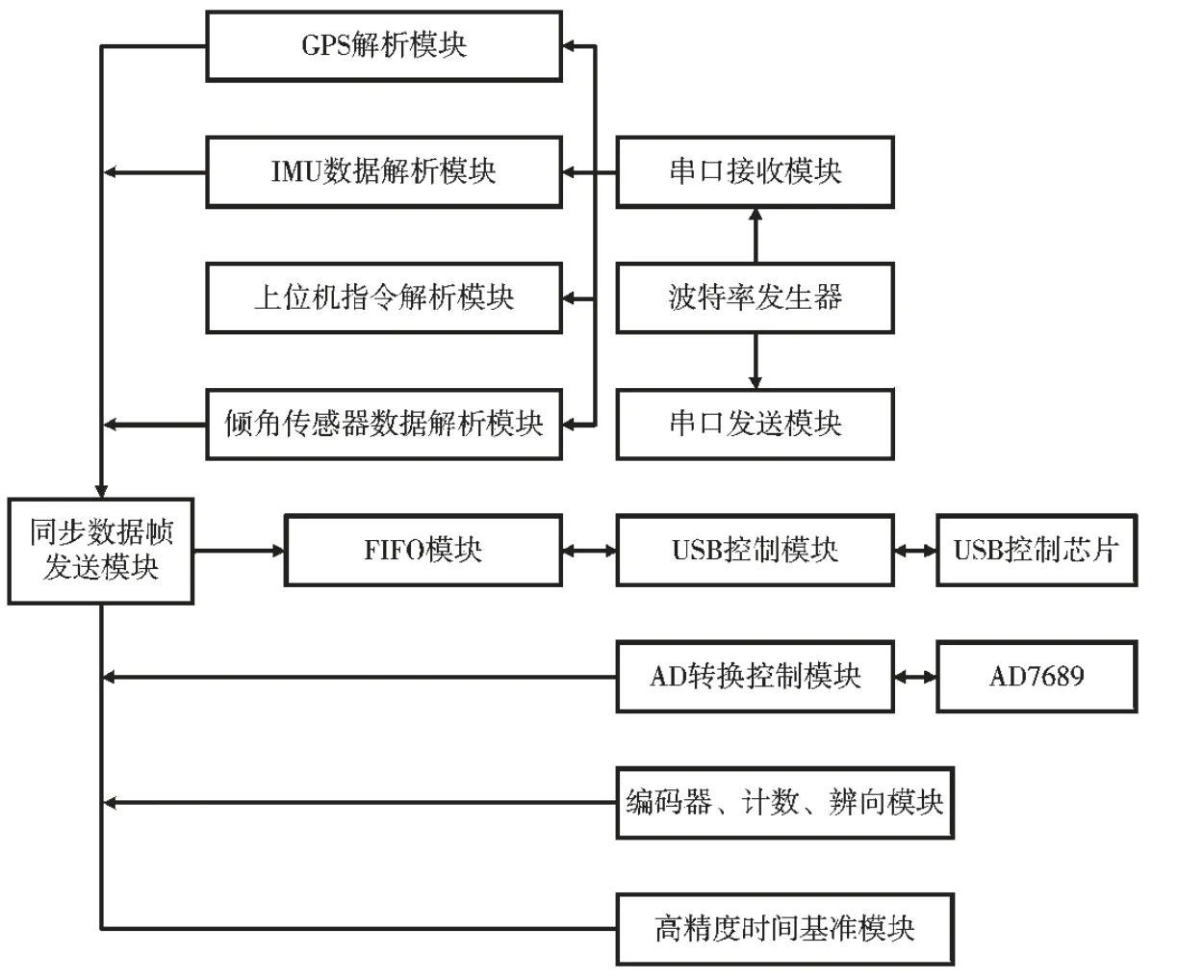
图11 多传感器数据采集同步控制流程图
FPGA 主控制模块程序设计主要包括高精度时间基准建立模块、A/D 转换控制、串口收发模块、编码器计数及辨向模块和FIFO 及USB 控制模块。FPGA 通过SPI 接口控制16 位AD7689 转换芯片,启动A/D 转换,读取转换后的位移传感器、倾角传感器和温度传感器的数据以及对应的采样时刻;串口收发模块实现FPGA 和串口的数据接收和发送。系统使用多个串口,串口1 实现FPGA和TX2 的数据交互,FPGA 通过该串口接收TX2 发送的指令,启动系统工作或停止,反馈查询结果;FPGA 通过串口2 接收惯导的数据;串口3 实现FPGA 和GPS 之间的数据接收和发送,接收GPS 发出的NEMA 数据;编码器计数及辨向模块对两路编码器发出的脉冲进行正反计数,实现两路编码器位置的实时计数;FIFO 及USB 控制模块是对Cypress 公司USB 转换芯片CY68013 进行控制,将采集到的多传感器数据打包后,写入到FIFO 缓存,USB 控制模块控制FIFO 中的数据,向CY68013 写入,从而实现多传感器同步后的数据从FPGA 到TX2 的上传。
3.2 A/D 采集模块程序设计
A/D 采集模块在FPGA 程序设计上,使用三段式状态机,设置空闲、初始化、等待、数据读取4 个状态。ad_en为使能信号,ad_done 为扫描结束的标志位,采集频率freq 是由一个分频模块输出固定频率的脉冲实现,将freq 信号延迟2.5 μs 后输出作为转换数据读取的启动时钟。当工控机发送系统开始工作指令后,将ad_en 置为高电平,A/D 进行数据采集,直到工控机发送系统停止工作指令后,将ad_en 置为低电平,A/D 停止数据采集;当读取的通道编号为最后一个通道时,置高ad_done 标志位,启动一次A/D 同步数据的FIFO 写入操作,即将年月日、时分秒微秒、5 个通道数据按照协议设计写入FIFO 缓冲器。AD 状态转换图如图12 所示,各模块逻辑接口示意图如图13 所示。
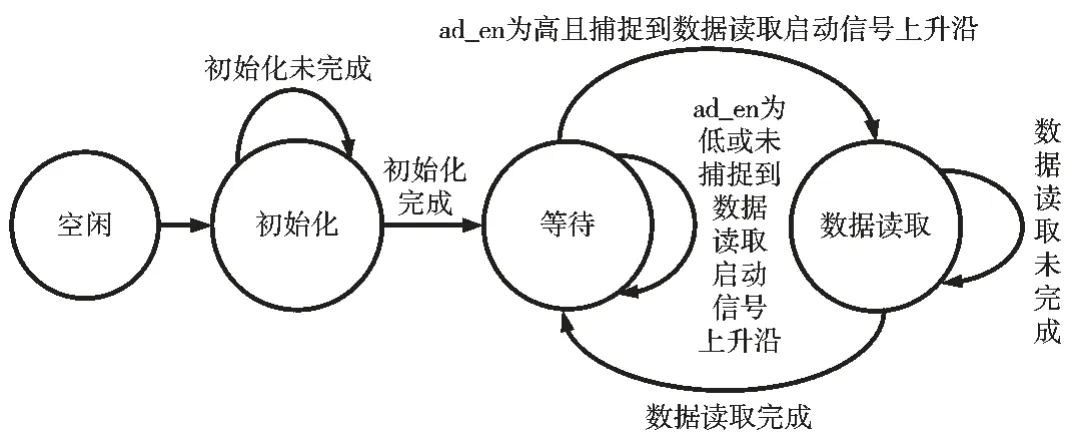
图12 A/D 状态转换图

图13 A/D 逻辑接口示意图
4 主要性能测试
轨道动静结合快速检测多源数据采集模块核心板和接口板如图14 所示。经反复测试验证,目前电路板硬件运行良好,FPGA 控制程序稳定,能够按照设定的时间间隔,完成惯性测量系统、GPS、里程编码器、位移传感器、激光位移传感器、温度传感器等多种传感器的同步控制及数据采集,TX2 上的采集软件工作正常,上位机能够通过网络接口向TX2 下发控制指令,读取TX2 采集存储的多传感器数据,为后续研究工作的开展奠定了坚实的基础。
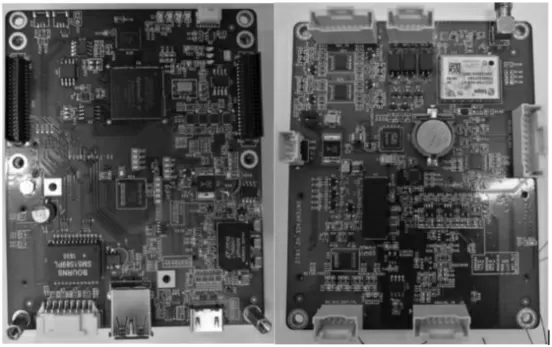
图14 电路板实物图
4.1 调理电路仿真分析
位移传感器、激光位移传感器和温度传感器输出的模拟信号经过信号调理放大电路输入至A/D 可以接受的信号幅值,图15 为某一路位移传感器信号调理仿真图,图16 为信号带宽图。
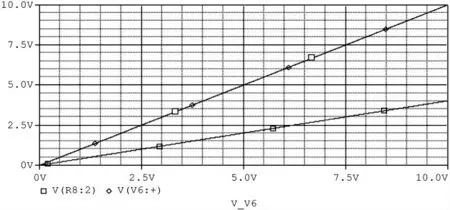
图15 某一路位移传感器信号放大图
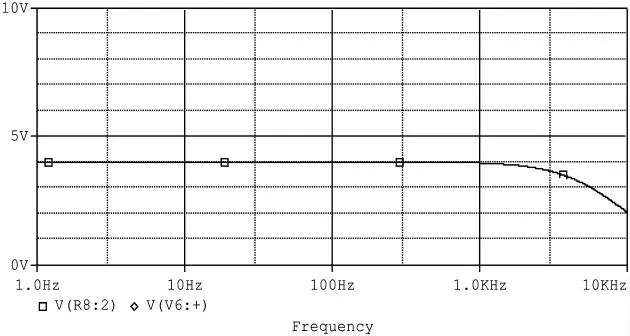
图16 某一路位移传感器信号带宽图
从仿真结果可以看出,当位移传感器输入的模拟信号幅值由0 V 增大到10 V 时,经过信号调理之后输出的幅值为0 V 到4 V,在A/D 可接受幅值范围内,其截止带宽频率大约为6 kHz,可有效滤除噪声。
4.2 传感器数据采集
惯导输出为RS422 接口,在接口板上转换为3.3 V 电平信号后,输入至FPGA,由FPGA 读取惯导的数据。两路编码器均输出为RS422 接口,在接口板上转换为3.3 V电平信号后,输入至FPGA,由FPGA 通过计数器记录编码器数据。倾角传感器输出为RS232 接口,在接口板上转换为3.3 V 电平信号后,输入至FPGA,由FPGA 读取倾角传感器的数据。FPGA 通过AD7689 采集位移传感器、激光位移传感器和温度传感器的数据。FPGA 将采集到的IMU、编码器和倾角传感器的数据以及FPGA 读取AD 采集到的数据一起打包后通过USB 传输模块传输至TX2 数据处理单元,其中TX2 采集并存储同步板传输过来的原始数据,如图17 所示。
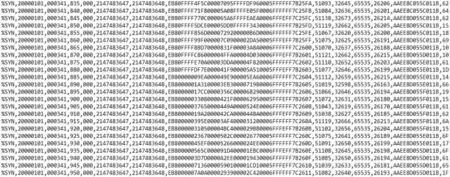
图17 TX2 采集并存储的多传感器原始数据图
TX2 通过上层软件把采集到的多传感器原始数据按照既定的格式解析出来,得到的解析后的数据如图18所示,其中每一列的数据所代表的含义如图19 所示。根据陀螺和加速度的零偏、标度因素等参数即可解算出精确的实际数据。
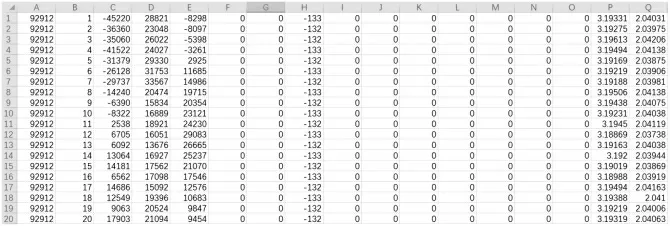
图18 TX2 解析原始数据后的数据图

图19 解析后的数据格式图
4.3 惯导传感器数据采集分析
惯性测量单元是根据三个方向的加速度计和陀螺仪组成,通过对加速度及和陀螺仪的测量值进行积分解算来得到当前位置的姿态信息。图20 为一段时间获取的加速度计数据图,图21 为陀螺仪数据图。
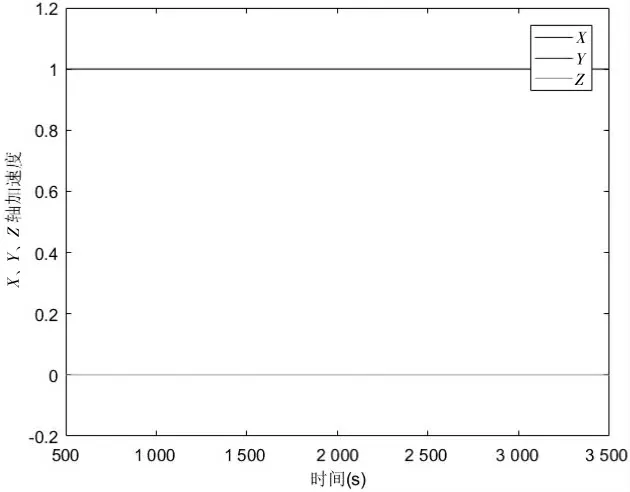
图20 惯导加速度计数据图
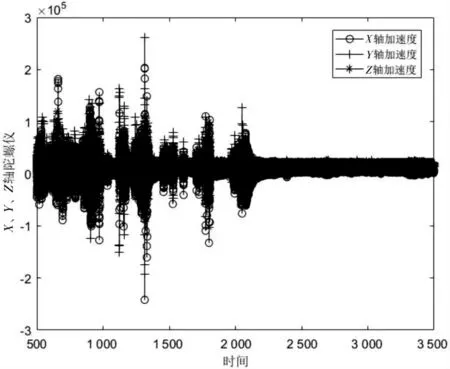
图21 惯导陀螺仪数据图
从测试结果分析,在系统初始静止的时候,IMU 的加速度计X、Y 轴的加速度在0 附近,Z 轴的加速度则在重力加速度g 左右。
4.4 检测偏差重复性分析
结合轨道线路的名称、检测设备、日期范围、里程范围和线路的速度等级,以此来确定检测偏差的重复次数,如果检测偏差重复次数较多,可以判定为该区域属于质量薄弱的路段,需要对该路段及时进行改良。图22为轨道横向偏差重复性波形图,图23 为轨道垂向偏差重复性波形图。

图22 轨道横向偏差重复性波形图
通过分析横向和垂向偏差重复性波形图可知,横向偏差范围在4 mm 以内,垂向偏差范围在7 mm 以内,由此可知该路段铁轨质量良好,在其允许误差范围内。
5 结论
本文设计了一套轨道动静结合快速检测多源数据采集模块,以FPGA 为主控芯片,以TX2 为处理单元,利用高稳晶振结合GPS 输出的PPS 脉冲建立高精度的时间基准,通过FPGA 控制AD 转换芯片的采样时间,实现位移传感器、激光位移传感器、温度传感器等传感器数据的同步采集,并将对应时刻的惯性导航单元、GPS、编码器、倾角传感器等传感器的数据打包,通过USB 传输模块上传至TX2 进行数据解析、融合处理及存储。测试结果表明,轨道动静结合快速检测多源数据采集模块的时间同步精度达微秒级,并具有体积小、安装方便、功耗低等一系列的优点,很好地满足了轨道动静结合快速检测系统的要求。
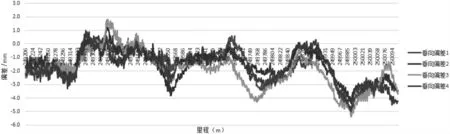
图23 轨道垂向偏差重复性波形图
