应用无人机系统对高速公路土石方的智能化计量1)
2021-07-30张珊珊苏义坤苏伟胜何廷全
张珊珊 苏义坤 苏伟胜 何廷全
(东北林业大学,哈尔滨,150040) (广西新发展交通集团有限公司) (广西新恒通高速公路有限公司)
土石方计量是高速公路工程项目建设中的重要内容,在项目施工全过程中占据着重要地位,其计量的精准程度、效率、及时性对项目工程造价和项目进度管控等产生直接影响[1-2]。土石方工程,包括场地平整、挖(填)土石方等工作,计量作业量巨大,且以不同的形态发生于高速公路全线路中。传统的土石方计量方法,一般利用全站仪、GPS、LiDAR等设备获取地面控制点数据进行计算,这些传统的测量方法,存在易受地形影响、作业时间长效率低、在地形复杂区域工作人员操作危险性高、获取数据精度易受人为因素影响难以控制等问题[3]。因此,传统土石方计量方法亟待改进。
随着科技的发展,土石方计量方法也不断地更新进步[4-8]。但现有研究仍停留在土石方计量方法理论、数据源采集技术的探索研究[9-10],关于将土石方系统化、智能化计量的分析研究较少。本研究将无人机外业采集与内业数据处理进行一体化整合应用,提出了一种应用无人机系统的高速公路土石方智能化计量模式,形成将无人机倾斜摄影采集地面土石方数据、结合无人机数据处理软件(Pix4Dmapper)建立土石方实景三维模型、利用三维模型生成数字高程模型并进行体积量测计算土石方量的智能化计量统一体系。该智能化计量方法能够实现土石方量自动精准计算与结果可视化,达到高速公路土石方计量过程智能化,提高工作效率。
1 研究区概况
研究对象位于贺巴高速来宾至都安路段,本路段位于广西中西部,路线由东向西,主线路全长134.037 km,具有局部地形复杂、坡度起伏较大、桥隧工程量较多等特点。选取BK55+320~BK55+410清淤换填标段,作为无人机飞行测区,测区面积大小和形态满足测试要求。本研究选用大疆经纬M210 RTK V2多旋翼无人机作为飞行平台,搭载5镜头高分辨倾斜相机进行同步影像数据采集,并利用中海达V6 GPS-RTK测量仪进行地面控制点数据采集。
2 研究方法
2.1 无人机系统智能化计量模式设计
高速公路土石方智能化计量,以智能、精准为目标,以简化土石方计量工作外业任务、提高高速公路土石方计量效率、满足施工人员对高速公路土石方计量工作的安全性为前提,运用现代化信息技术手段进行智能化计量模式设计(见图1)。
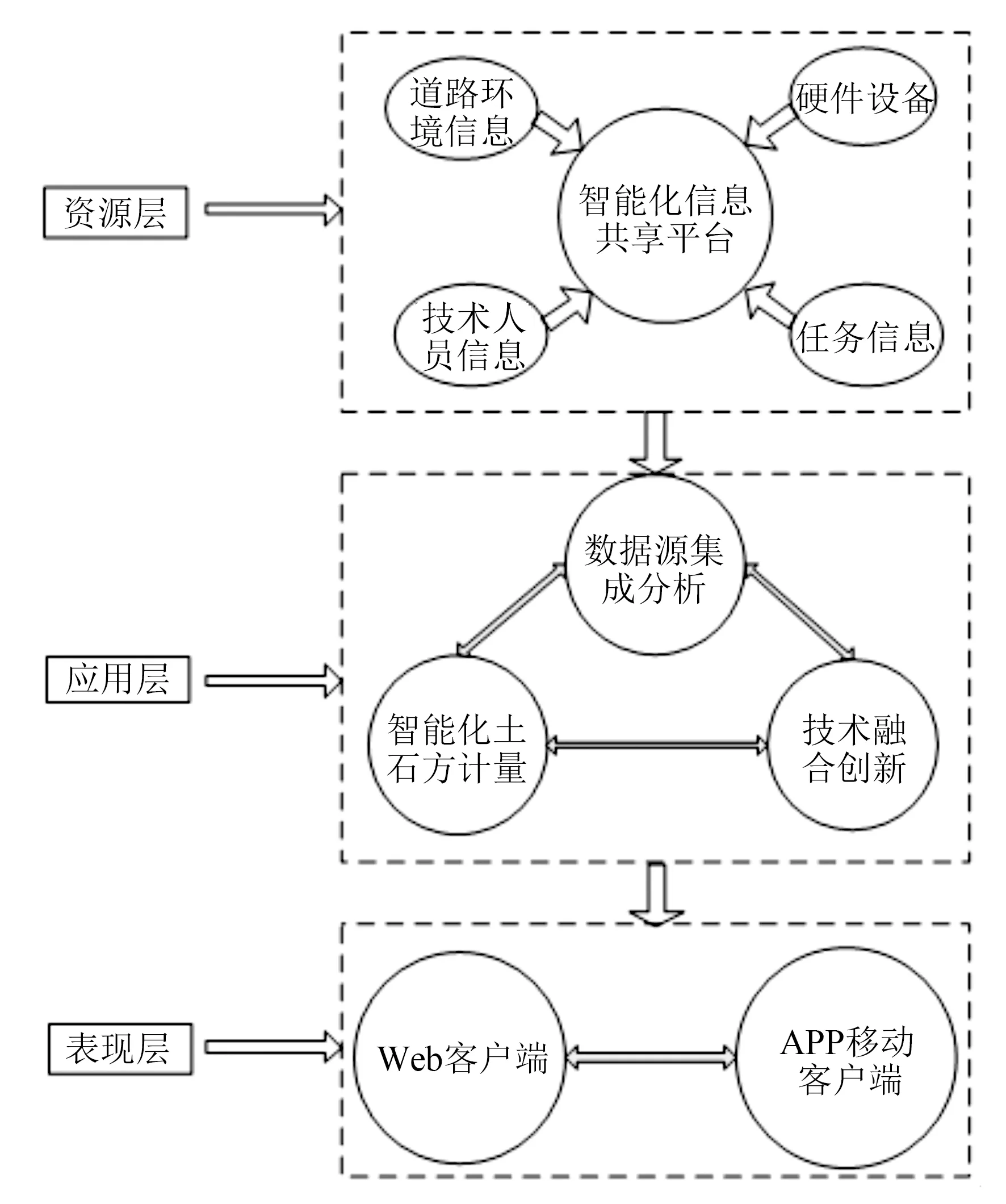
图1 智能化计量模式总体设计框架
由图1可见:高速公路土石方工程智能化计量模式,主要从资源层、应用层、表现层三个方面分析设计。在资源层,将土石方施工任务、选取无人机型号、无人机操作环境信息、相关技术人员资料,统一置于智能信息平台上,整合土石方计量相关任务数据信息,有效进行无人机飞行方案选取确定。在应用层,利用现代化信息技术对无人机航摄获取的影像信息集成分析,并结合无人机数据处理软件计量土石方量。通过信息网络将获得的成果数据存储到表现层中的云端数据中心,实现土石方计量的过程智能化和结果数据可视化。
2.2 土石方三维实景模型建立
高速公路土石方工程发生在全路段,具有多形态的特点。利用无人机倾斜摄影技术,以无人机为飞行载体,搭载倾斜摄影5镜头相机同时拍摄,不同方向的倾斜摄像头角度均为45°,可同时获取地面土石方影像信息及方位信息[11]。在高速公路项目外业数据采集过程中,无人机在航测时,会通过GPS导航定位系统对每个图像数据自动记录相应的三维空间位置信息,并利用GPS动态测量(GPS-RTK)设备选取测量地面像控点。三维模型在生产过程中,使用无人机数据处理多功能三维建模软件,高效自动智能地对倾斜影像进行预处理、区域网联合平差、多视影像匹配、生成数字表面模型(DSM)、构建不规则三角网(TIN)、纹理映射等分析处理,最终生成土石方三维实景模型。
2.3 无人机倾斜摄影三维模型工作流程
应用无人机倾斜摄影技术对高速公路土石方工程实景三维模型的建立,主要分为两个阶段:外业数据采集、内业影像处理。其中,外业数据采集主要包括:
①确定任务区域。根据现场踏勘以及工程技术资料确定无人机飞行拍摄区域范围,避免漏拍、错拍。
②设置无人机飞行控制指标。在地面站上根据飞行区域地势特征设计出飞行方案,包括飞行航线规划、无人机飞行高度、拍摄旁向与航向重叠度、巡航速度、返航点位等技术指标,并调整相机角度对焦。
③数据源采集。根据制定的航摄方案进行无人机飞行作业,通过无人机倾斜摄影自动拍摄,获取无人机影像数据和空间定位定向数据(POS)。无人机影像数据,是利用无人机搭载的多镜头倾斜相机拍摄的照片;空间定位定向数据即记录无人机拍照点位的坐标位置与姿态。利用实时动态定位测量设备均匀布置地面像控点,其坐标信息同时作为数据源。
本研究主要利用无人机数据处理软件对数据进行内业处理。关键技术主要包括:
①航片预处理。检查获取的影像中是否有不合格的相片,将拍摄无效的图像进行剔除,按照数据处理软件中数据导入要求,对拍摄获得的数码航片进行辐射分辨率调整以及航片匀色、降噪等处理,同时查看空间定位定向数据文件,若空间定位定向数据与影像数据中的相片号不一致,应及时作出调整,有利于提高数字正射影像图(DOM)产品的质量。
②多视影像区域网联合平差。多视影像包括垂直影像和倾斜影像,由于摄像镜头外方位及周围环境因素的影响,可能出现遮挡和像片形变的情况,利用区域网联合平差,处理倾斜摄影数据,能有效解决影像之间的遮挡以及几何变形问题。结合上述得到的空间定位定向数据中多视影像外方位元素,按照金字塔匹配策略,对每一级影像中的同名点进行自动匹配和区域网联合平差,可以得到较好的同名点匹配结果,这是后续的一系列摄影测量处理与应用的基础。
③多视影像密集匹配。倾斜图像的笼罩区域大、分辨率高,影像经过密集匹配处理,可以生成场景表面大量、稠密的三维点云,能够完整全面地表达地物特征。但在密集匹配过程中,可能会产生大量冗余信息,如何快速准确地匹配到倾斜图像的同名点坐标和获取地物三维信息数据,是密集匹配环节中的关键。
④数字表面模型生成。通过多视影像密集匹配得到高密度点云数据,再由其构成不规则三角网,进而形成数字表面模型。该模型分辨率高,可以充分表达地形样貌、地面起伏及地物特征。
⑤数字成果生成。在三维点云加密的基础上,通过三维网格纹理重构,生成三维实景模型、对地形进行拟合生成数字地表模型、通过正投影纠正与影像拼接生成数字正射影像图等数字成果。
具体无人机倾斜摄影三维建模流程见图2。
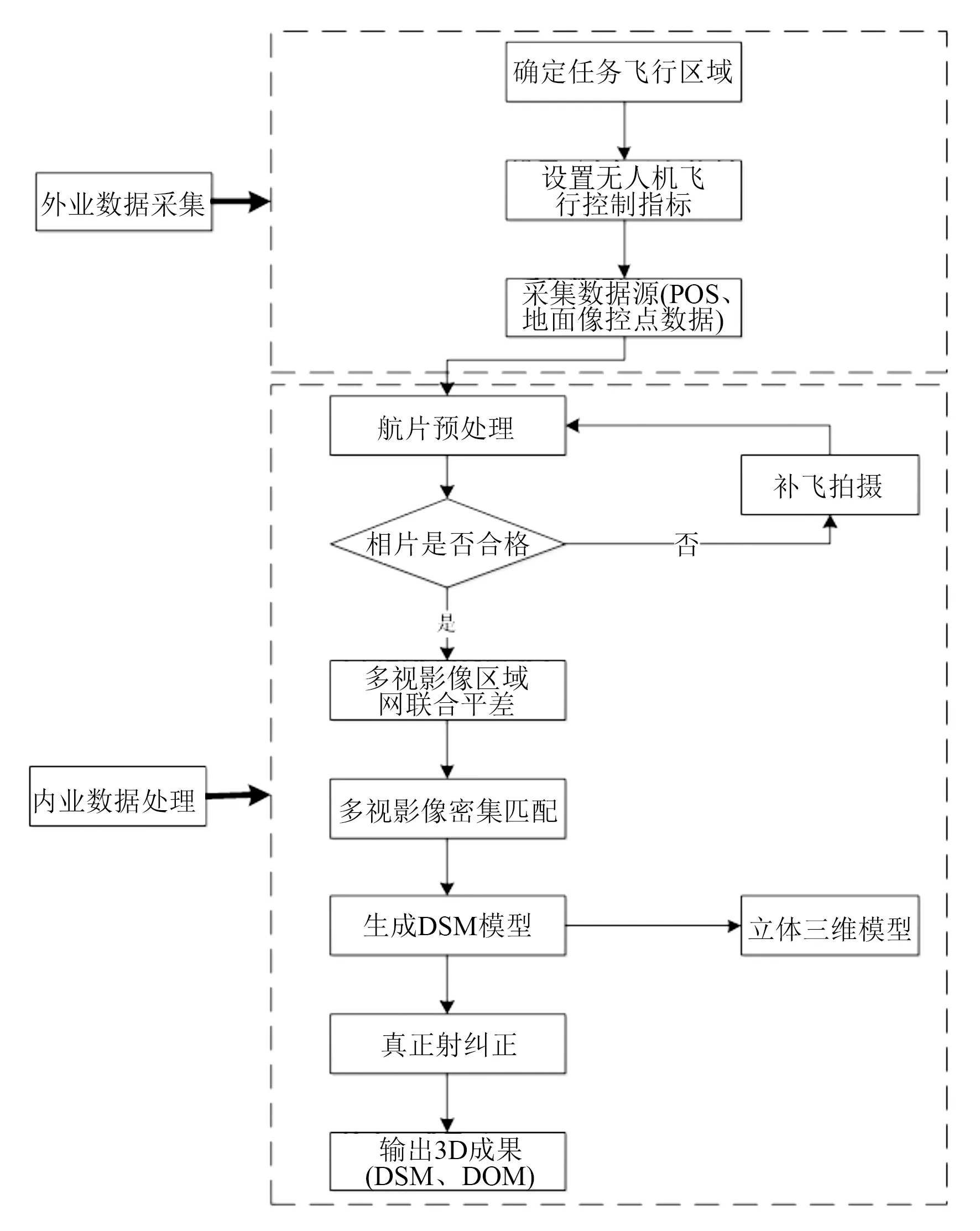
图2 无人机倾斜摄影三维建模工作流程
2.4 土石方智能化计量方法
土石方计算,是指设计标高与原始地形表面标高之间的体积差值计算。传统的土石方计算方法,主要有方格网法、断面法、等高线法等。这些方法存在易受地形影响、外业数据测量操作难度较高、工作量大等缺点[12-13]。与传统计算方法相比,智能化计量是利用无人机和建模软件构建生成数字表面模型,通过网络传输至云平台,对模型中非地面点高程进行改正,构建数字高程模型(DEM),经过平台对模型的云计算分析处理,自动计算出土石方工程量。该方法能够更好地适应各种复杂地形环境和土石方测算形态,不受人为因素和环境因素影响,保证计算结果的准确性,并减轻工作人员工作量。
数字高程模型是用离散性的数字形式,将一组有序数值阵列形式表示地面高程的一种实体模型,以用来表达地形高低起伏特征状态。可用数学表达式描述:Zi=f(Xi,Yi),i=1、2、…、n。式中:Xi、Yi分别为离散变量,表示某点的平面坐标;Zi为该点处的高程。
本研究利用无人机倾斜摄影技术,结合无人机数据处理软件影像处理,获取三维点云数据生成数字高程模型,并构建不规则三角网。不规则三角网能够高精度地描述地形细部特征,对于斜坡、陡坎、断面等破碎地形描述更加精确,更加适用于地形复杂的高速公路建设项目。应用不规则三角网法计算土石方工程量,已知原始地表高程(记为Ht)、设计高程(记为Hd)。将原地表高程面与设计水平高程面进行叠加,即得到测算区域,利用三角形微分的方法将测算区域划分若干个不同高度的三棱柱,所需计算的区域总体体积则是所有三棱柱体积之和。根据原始地表面和设计表面之间的关系,计算可以分为3种情况:
当设计表面完全在地形表面之上时,此时只进行填方(Vt)处理,计算公式为:Vf=S(H1-H2),H1-H2<0。
当设计表面完全在地形表面之下时,此时只进行挖方(Vd)处理,计算公式为:Vd=S(H1-H2),H1-H2>0。
当设计面与地表面相交时(见图3(b)),地表面部分位于设计面之上,部分位于设计面下方,两平面相交于直线EF,同时要做填方(Vt)和挖方(Vd)处理,计算公式为:Vd=S△C2EF×H3/3;Vt=S×H2-S×H1+Vd。
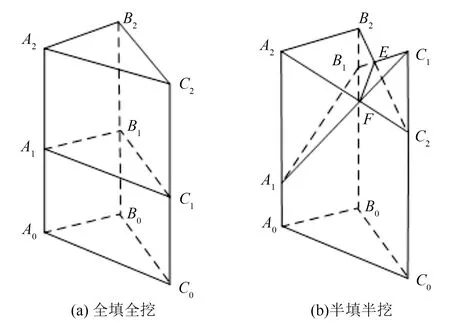
图3 应用不规则三角网土石方体积计算
上述式中:H1为原地表平均高程;H2为设计高程;H3为点C1到平面A2B2C2的距离;S为△A0B0C0的面积。
根据无人机数据处理软件构建的实景三维模型,获得土石方地面点地理数字高程信息,应用三角形微分土石方计算原理,设计了一个土石方智能化计量系统(见图4)。该系统能够完成基础数据的输入输出,实现从现有的实景三维模型中提取数字高程信息,通过输入施工设计标高,利用不规则三角网法自动计算体积差值,自动完成挖(填)土石方量的计量,同时将计算成果保存并导出,实现高速公路土石方计量智能化、成果可视化。
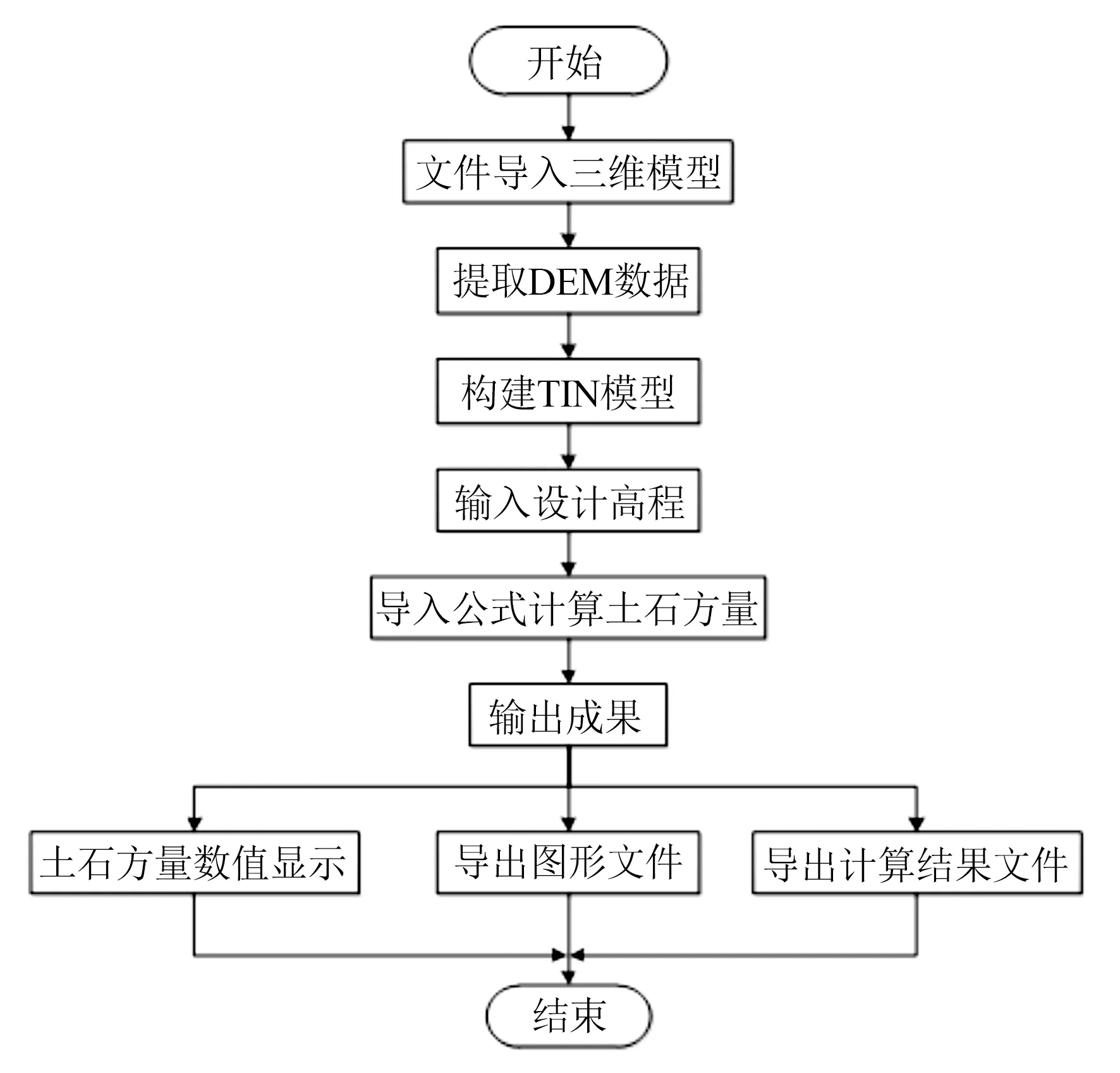
图4 土石方智能化计量系统设计方案
土石方智能化计量系统(初始界面见图5),主要使用C#语言,使用微软NET框架(NET Framework)进行架构,将无人机数据处理软件构建的实景三维模型数据,通过关系数据库管理系统(SQL Server)数据库技术进行存储,利用不规则三角网法进行分析计算,并同步到云端进行备份。该系统设计多个实用性功能模块,以满足用户需求,并优化界面提供一个简洁的设计窗口。
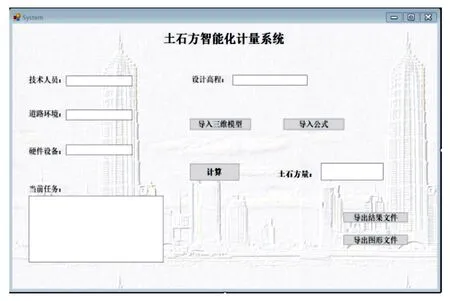
图5 土石方智能化计量系统初始界面
为验证土石方智能化计算的准确性及可用性,本研究利用GPS动态测量设备采用均匀采点的方式,采集地物点的高程值作为实际观测值,并对地势起伏较大区域加密采集。将应用无人机航摄建立数字高程模型上的同名地物点的高程值,作为无人机航摄测量真值。
中误差是衡量观测精度的一项重要指标[14]。其计算公式为:m=[∑(Δ)2/n]-1/2。式中:n为观测点个数;Δ为观测值与真值之间的差值;m为计算所得中误差。依据上述公式,将GPS动态测量设备测量和无人机测量所得数据进行比较计算,利用中误差的性质和标准评价此次测量高程精度。
2.5 数据采集与处理
本研究通过工作人员现场踏勘,并结合收集到的技术资料,根据无人机倾斜摄影工作流程确定了无人机飞行航测方案,考虑测区地理环境,无人机起降点选择在地面较平坦位置,起降点上方无树木、高压线等遮挡物;天气晴朗,风力一级,航摄时长15 min。主要参数:无人机型号——大疆经纬M210 RTK V2;相对行高30 m;航向重叠度不小于80%;旁向重叠度不小于80%;拍摄角度——倾斜相机倾斜45°,摄像头朝前进方向;飞行速度2 m/s;拍照间隔2 s。
为了控制整个研究区的精度,根据实际地形地貌,每隔约100 m布设1个地面控制点(见图6),控制点之间的连接线尽量包含测试区域且上方无遮挡物,利用三角红纸板作为航测地面控制点,用GPS-RTK移动站测量红纸中心点坐标并记录。并利用无人机倾斜摄影技术和GPS动态测量设备获取的土石方地表空间定位定向数据,通过有限以太网或无线WiFi链传输到无人机数据处理软件中,对获取的土石方影像进行自动化处理,形成地理空间数据,生成数字正射影像图、数字表面模型、三维点云与模型等数字成果。包括三维坐标和颜色信息,可用于提取构筑物尺寸及空间位置信息。用于目视判别地表情况,对工程土石方计算、测区堆体体积统计等与高程有关的地貌形态进行分析。
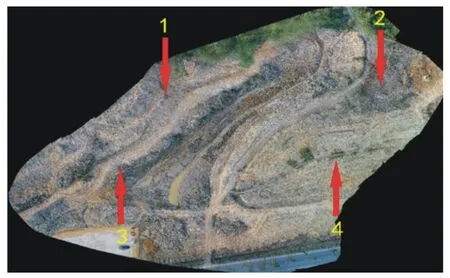
图6 地面控制点分布图
3 结果与分析
3.1 土石方智能化计量精度
通过无人机倾斜摄影技术拍摄清淤换填的原地面(清表后)、清淤后、回填后3个阶段的地形图像数据,结合无人机数据处理软件(Pix4Dmapper)建立3个阶段的实景三维模型(见图7),确定测量边界线;通过无线网络将模型传输至土石方智能化计量平台,输入设计标高数值,对其体积自动化计算;经计算可知,该测区清淤方量为9 219.85 m3、回填方量为8 315.555 m3。
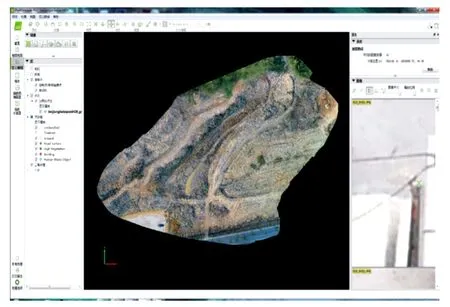
图7 数据处理软件界面
为验证土石方智能化计量的准确性,本研究通过GPS动态测量均匀采点的方式,采集地面数据点数据,并对地势起伏较大区域加密采集;运用传统方格网法计量土石方,复核计算测区场地的清淤方量和回填方量(见表1)。由表1可见:无人机系统智能化计量结果优于GPS动态测量设备实测数据计量结果,清淤方量差值比为1.119%、回填方量差值比为0.995%,能够满足土石方计量的规范要求。
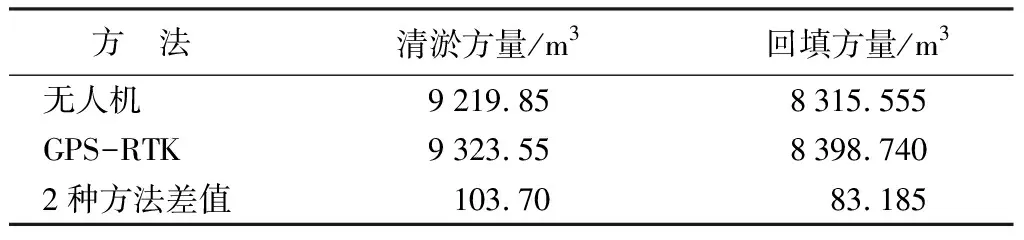
表1 2种方法清淤回填土石方的计量结果
3.2 检查点高程数据获取精度
将施工单位使用GPS动态测量设备测量清淤后地面48个点的实测高程值,与应用无人机系统生成的三维模型同名点高程值进行对比(见图8、表2)。由表2可见,2种方法测量高程值,差值波动较小。其中39号点高程差值绝对值最大为46 mm,经计算得高程差值中误差约为2.162 cm,基本满足高速公路项目高程数据获取精度要求。
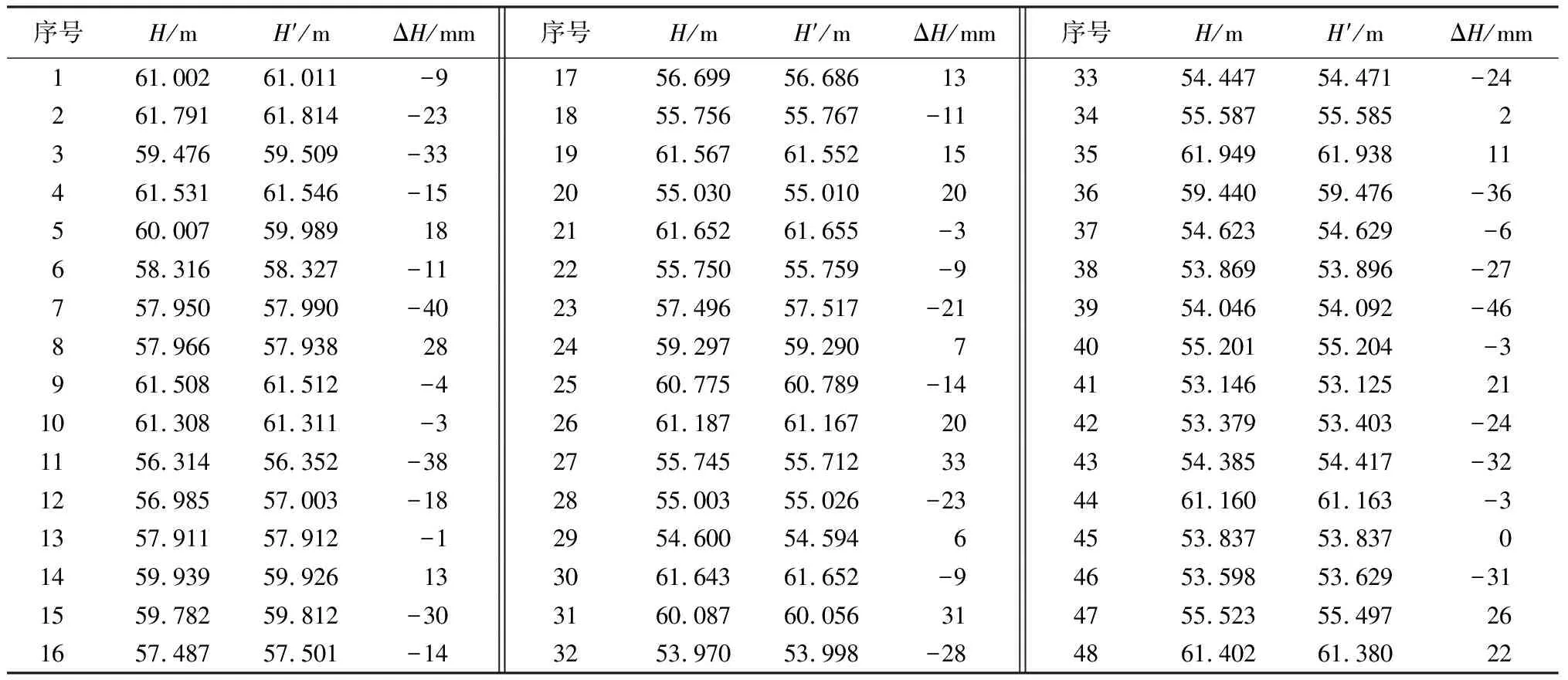
表2 2种方法清淤后测量的高程值
4 结论
与传统方法相比,利用无人机技术智能化计量,外业工作量少,可提高作业效率,有效保障在复杂地形危险区域测量人员的安全性。
本研究应用2种计量方法,清淤方量差值比为1.119%,回填方量差值比为0.995%,高程差值中误差为2.162 cm,说明应用无人机技术建立三维模型的精度可靠。
应用无人机摄影技术建立实景三维模型,智能化计算土石方精度完全符合规范要求,值得行业推广使用。
