基于Ad Hoc模式下的UUV水下通信组网技术研究
2021-07-28马亮张佳琪孙新溢栾涛
马亮 张佳琪, 孙新溢, 栾涛
(1.中国人民解放军海军潜艇学院,山东青岛 266000;2.91208部队,山东青岛 266000)
0 引言
无人潜航器作为新一代水下作战平台,可装载声呐、光、磁传感器及通信导航设备,具有体积小、集成化水平高、存储容量大等特点,在军事运用方面有较大的潜力。为充分发挥其水下战术优势,提高远海信息传输能力,将UUV作为水下节点进行组网通信,并针对UUV的移动特性,选用自组织、多跳移动的组网方式,在此基础上通过对网络拓扑结构、多址接入方式、路由选择等方面的研究,确保了信息传递的可靠性。
1 国内外UUV组网情况
为实施网络中心战,开发新一代水下信息作战网络,自20世纪90年代起,美国开始研发实用的水声网络Seaweb,该项目将水下无人航行器(UUV)作为网络的移动节点,并与重发节点、网管节点完成水下网络的通信及导航任务。2004年美海军发布的UUV主计划,重点关注UUV组网技术的研究,2006年于“Submarine Roads Ahead”论坛上发布了近海连续监视网络PLUSNet计划,系统由携带半自主传感器的UUV组成,这些UUV可在无人指导的情况下进行通信并作出最基本的判定[1]。我国在“863”计划的牵引下,各科研院所纷纷对水下探测及通信领域展开研究,并已通过湖上试验、研制样机等手段取得了一定的科研成果。目前,中科院声学所研制的ACN系列产品,在AUV的控制方面得到有效应用,厦门大学AMLink系列的水下Modem将水声通信与定位合二为一,能更好的完成水下网络通信和定位任务。
2 UUV组网的总体部署方案设计
总体部署方案:水下UUV组网过程中,岸基指挥中心统过有线传输方式(海底光缆),将命令传递至水下基站,水下基站接收信息后转发至UUV中继节点,这些中继节点通过水声通信方式,将特定信息传递至相应的UUV任务单元,以完成指令信息的发送过程,若将信息传递至岸基则与上述过程相反。图1所示为UUV的通信部署方案图[2]。

图1 UUV通信组网部署方案Fig.1 UUV communication network deployment scheme
3 Ad Hoc的组网模式
针对UUV具有移动性强,高度智能化的特点,水下组网选用移动自组网(Mobile Ad Hocnetwork)模式。MANET(移动Ad Hoc网络)不依赖于水下有线通信设备,各节点由移动终端(UUV)组成,通过信号覆盖区进行通信,如果两通信节点距离超出覆盖范围时,需通过相邻UUV充当中继节点,形成多跳无线网络对信息进行转发。该系统具有抗毁能力强,无需架设基础网络设施,可快速部署的特点,已成为战术组网的核心技术。
3.1 Ad Hoc 的网络体系结构
在建立水下网络时,需根据水下组网的任务需求,综合考虑网络建设规模,信息传输速率等因素,对网络拓扑结构进行选择。
Ad Hoc有两种结构,分别为平面结构和层次结构,图2、图3为Ad Hoc的两种拓扑结构。
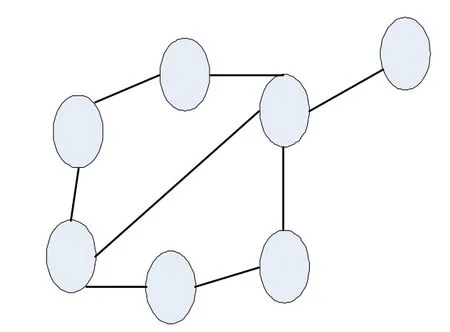
图2 平面结构Fig.2 Planar structure
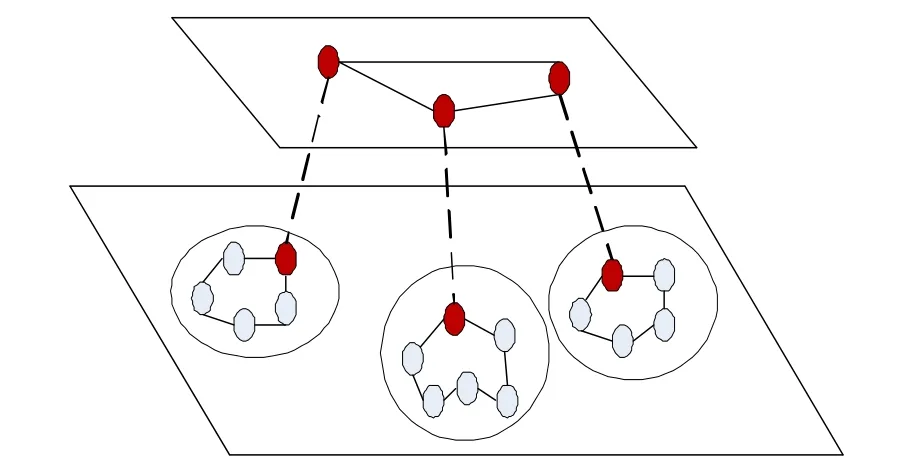
图3 层次结构Fig.3 Hierarchical structure
平面结构上的各节点能力相同,仅需存在多条路径便可用于通信,但其存在路由开销较大,可扩展性较差的缺点。
层次结构,将网络分成多个簇(cluster),每个簇相互独立,低级簇的簇头形成高级簇并对路由信息进行转发[3]。采用此类结构,可将拓扑变化对路由的影响控制在单个簇中,旨在减少节点移动对整个网络的影响,此外根据配置不同该结构可分为单级分层和多级分层结构。从使用上分析,分级结构路由开销较小、节点定位简单,且抗毁性、扩展性较好,因此在实际运用中更有价值。
由于Ad Hoc在网络中采用多跳传输方式,在此过程中为保证信息的有效传输,需满足能量守恒和干涉两个约束条件。
(1)流量守恒条件:即节点发送的流量与接收的流量差是恒定的,等于自身产生流量的速率。其公式如下:

(2)干涉条件:即任意一节点的接收与发送流量之和不能超过一固定值:

3.2 网络路由设计
根据UUV网络拓扑结构的特点,结合水声环境因素,综合考虑水下节点传输带宽及能耗的限制,在Ad Hoc网络路由协议选择中需减小开销、优化算法结构且应具备较强的自适能力,因此无法将传统的有线及无线路由协议运用于Ad Hoc网络中。现有三种适用于Ad Hoc的路由协议分别为:动态源路由(Dynamic Source Routing,DSR)、临时按需距离矢量路由(Ad Hoc On-demand Distance Vector Routing,AODV)、优化的链路状态路由(Optimized Link State Routing,OLSR),对比以上三种网络路由协议,如表1所示:
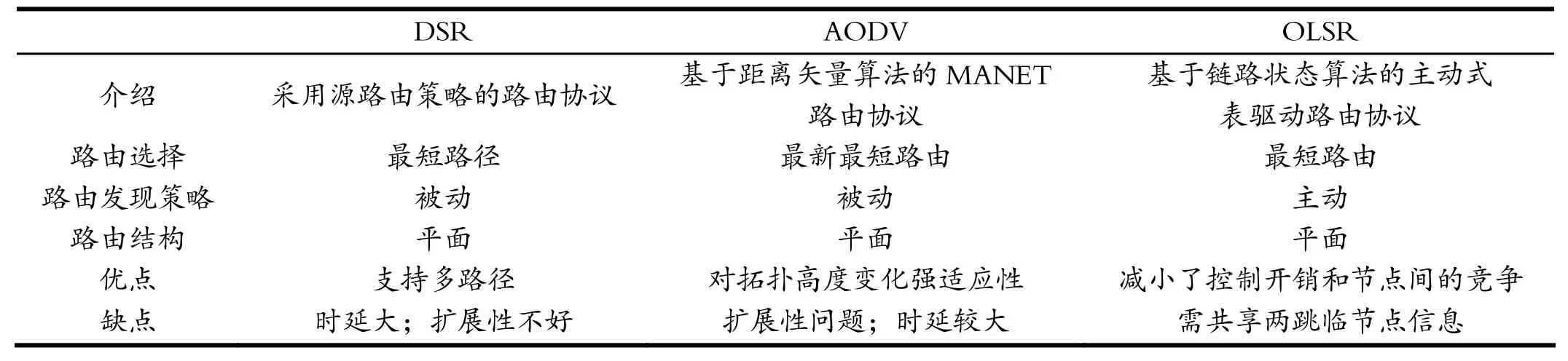
表1 网络路由协议比较Tab.1 Comparison of network routing protocol
通过比较可知AODV作为一种按需路由协议,不需要对路由表进行实时更新,可有效减小路由开销,缩短数据传输时延,提高通信效率,对节点变化的网络有较好的适应性,因此在Ad Hoc网络中需采用AOCD路由协议。
3.3 水下组网分层协议
网络中的UUV通信协议采用层级结构划分,以开放系统互联模型OSl(Open System Interconnection model)和TCPIP模型的协议结构为基础,结合海洋环境的特点,水声通信网络被分为4层结构如图4所示。
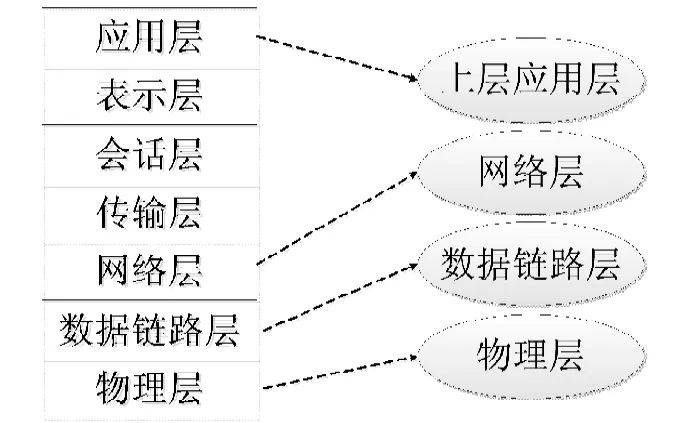
图4 水声网络协议栈演化图Fig.4 Evolution of underwater acoustic network protocol stack
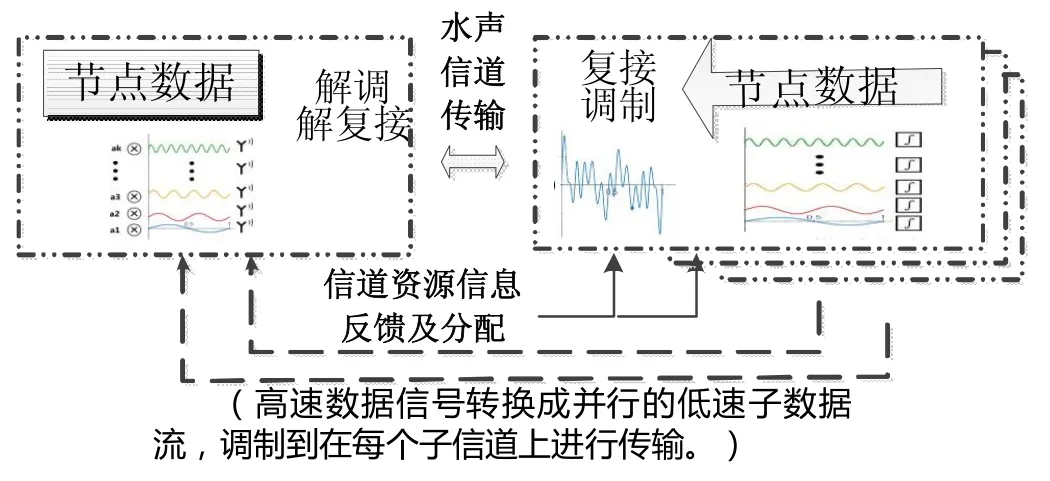
图5 水声自适应OFDMA方案Fig.5 Acoustic adaptive OFDMA scheme
物理层:主要实现对接收信号调制及传送的功能,通常采用OFDMA(Orthogonal Frequency Division Multiple Access,正交频分多址)方式进行信息传输,OFDMA是正交复用技术(OFDM)的优化,是利用OFDM对信道进行子载波化后,是在部分子载波上加载传输数据的技术[4]。
数据链路层:主要负责对来自网络层信息的传输,为实现这一功能需将数据组合成数据块(帧),并借助循环冗余检验CRC(Cyclic Redundancy Check)的检测技术进行差错检测。当多个终端同时访问同一资源(如共享的通信信道)时,就可能会产生信息碰撞[5],导致通信失败,在网络中,采用媒体访问控制(M e di a A c c e ss Control,MAC)进行寻址,以保证帧的准确递送及资源的合理分配。
4 UUV节点运动
在通信网络中,伴随着探测任务的变化,UUV节点将随机移动至新海域,通常情况下采用累计分布函数(Cumulative Distribution Function,CDF)计算UUV的自由分布概率,同时构建随机游走模型以表示这一变化过程。具体如公式(3)所示:

其中R为新圆形区域的半径,d为节点的变化距离
同时为保证UUV的合理布局,在确保UUV组网的顺利进行的同时降低节点间的重叠覆盖率,在UUV 水下运动过程中需引入间距阈值ijK,根据截八面体覆盖区域探测方式,其中R为节点感知半径。
当UUV节点间距小于ijK时,两节点做相斥运动,以降低节点间的重复覆盖率,反之则需做相向运动,图6、图7分别表示为受相邻节点作用下的排斥运动图[6]。

图6 两节点排斥运动Fig.6 Two-node exclusion motion
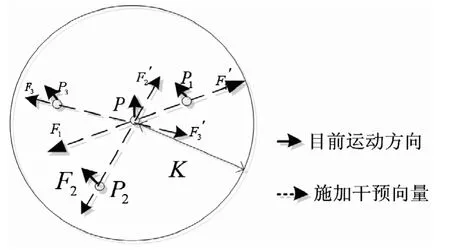
图7 多干预方向排斥运动Fig.7 Multiple intervention directional exclusion movement
UUV节点移动方向研究:设一节点P在ijK内受另一节点P1的影响,为避免碰撞,其干预量F的大小与间距r成反比。公式表示为:

对节点p有多个干预节点的公式表示为:

由上述公式可根据U U V的相对距离判断其运动的趋势。
5 结语
随着电子战向多维作战空间扩展,使用UUV作为水下信息通信的中继,具有极大的可达性,可实现信息的远程递送。为优化水声通信的网络结构,实现信息的快速传输,本文对组网过程中关键环节进行比较,得出适用于水下移动组网的相关技术,即采取MAC协议可降低能量损耗,构建层次拓扑结构可降低路由开销,同时路由层采用AODV协议,可减少路由发现过程的延时,进而提高UUV的组网通信能力。
