菱形负刚度机构HSLDS隔振器优化设计研究
2021-07-26袁屹杰张卫国
袁屹杰,纪 明,张卫国,王 谭
(西安应用光学研究所,陕西 西安 710065)
1 引言
由正、负刚度效应器件并联构成的隔振器,是HSLDS隔振器的主要形式,其中负刚度效应器件是决定隔振非线性的关键因素,为了获得更好的隔振性能,已发展出种类丰富的负刚度构型[1-5]。相关研究[5-6]表明,合理地增加隔振器非线性调节参数,可以较灵活地改善隔振性能。但在工程应用中,较丰富的调节参数,通常会增加设计难度:各参数间需要进行匹配优化,否则可能导致相反的结果。现有的研究多数仅从理论层面分析隔振器相关参数单独对隔振性能的影响关系,文献[7]将遗传算法引入到准零刚度隔振器优化设计中,以刚度非线性作为优化目标函数,对隔振器的相关参数进行整体优化,取得了较好的效果。但仍存在一定局限性,如:针对非线性参数的单目标优化方法,无法满足非准零刚度状态的HSLDS隔振器优化应用需求;同时,在工程优化设计中,受结构、材料参数限制及弹性器件规格不连续的影响,容易导致种群目标空间分布不均匀,采用经典遗传算法,存在局部目标空间搜索效率低下的问题。
针对提升非线性隔振性能并实现工程优化设计的需求,基于一种非线性调节能力较强且结构相对紧凑的菱形连杆负刚度机构,提出了具体的HSLDS隔振器实现方案,并提出了以隔振性能与负刚度机构质量为目标函数的多参数优化模型,将不连续因素纳入优化分析中。采用目标空间分区域搜索的NSGA-Ⅱ多目标遗传算法,获得隔振器参数Pareto最优解集;利用仿真方法对参数选择进行分析,并采用实物样机对结果进行验证。为菱形HSLDS隔振器工程优化、应用探索一条可行的技术途径。
2 隔振器分析建模
2.1 隔振器模型
菱形HSLDS隔振器方案,如图1所示。包含四个菱形负刚度机构,每个菱形负刚度机构由两组菱形连杆通过四根轴并联组成,各铰接轴处均可以灵活转动,其中,一组呈对角关系的铰接轴分别连接振动基座与隔振平台,另一组铰接轴分别连接拉簧的两端,拉簧处于拉伸状态时,菱形连杆机构具备负刚度特性。

图1 菱形HSLDS隔振器模型Fig.1 Rhombus HSLDS-VI Model
菱形HSLDS隔振器原理图,如图2所示。以振动基座与隔振平台间负刚度机构支点的水平距离L为基准尺寸,令:----AB=ɑL、----BC=bL、H=hL;H=0时,隔振器处于平衡位置,此时拉簧拉伸量为C=cL。为简化分析,令ɑ≥b。主隔振器的刚度为Kp=K,阻尼系数为Cp;拉簧的刚度为Kn=eK。

图2 隔振器原理图Fig.2 Illustrative Diagram of Isolator
令拉簧对B点的力为f,则沿----AC方向产生的合力F为:

式中:f0—拉簧的初始拉力。
F在振动方向的作用力为:

联立式(1)、式(3)、式(4),得到菱形负刚度机构沿平台振动方向的弹性力,结合主隔振器弹性力因素,隔振装置的等效弹性力为:

2.2 优化评价参数
忽略拉簧阻尼影响,菱形HSLDS隔振器的等效刚度与主隔振器阻尼是影响隔振性能的主要因素,其中,等效刚度包含两个影响参数。
其一是零位刚度,零位刚度为隔振器等效无量纲刚度的最小值,隔振器主要工作于平衡位置、即零位刚度附近区域,零位刚度很大程度上决定着隔振器的隔振性能。一般情况下,零位刚度越小,隔振性能越好。
依据几何关系,平衡位置处负刚度机构拉簧的变形量C0满足式(7)。

式中:sprcon—拉簧有效段两端与铰接轴间连接段的长度;n—拉簧有效段的圈数;d—拉簧的线径。
由式(6)与式(7)可得:

此外,还需要考虑刚度非线性因素对隔振的影响,如图3所示。虽然刚度曲线1与曲线2的零位刚度一致,当振动相对位移h超过一定范围时,曲线1对应的刚度数值将超过曲线2所对应的刚度。因此,需将刚度的非线性也作为隔振性能评价参数。
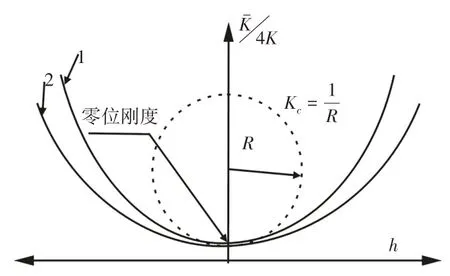
图3 隔振性能评价参数示意图Fig.3 Diagram of Vibration Isolation Performance Evaluation Parameters
目前,还没有广泛采用的刚度非线性量化评价方法,文献[7]将刚度小于某一数值所对应的相对位移区间宽度作为非线性评价参数,但在实际应用中,非线性的变化通常难以预估,导致参考数值的选取存在一定随意性。由于隔振平台的相对位移主要是在平衡位置附近区域,而刚度曲线在平衡位置处的曲率可以较好地反映平衡位置附近区域的刚度非线性变化趋势。因此,可采用刚度曲线在平衡位置点处的曲率Kc,即零位曲率,作为刚度非线性的量化评价参数。一般情况下,零位曲率Kc值越小,刚度曲线在平衡位置附近越平直,隔振性能越好。根据定义有:

除隔振性能外,HSLDS隔振器引入负刚度机构所产生的额外质量也需要纳入评估范畴,特别是在一些对质量较敏感的应用中。菱形HSLDS隔振器的负刚度机构由连杆、轴及拉簧构成,在参数选择阶段,可将连杆、拉簧参数作为优化分析变量。令质量评价参数为Sf:

式中:η—连杆质量因子;d、D、n、ρ—拉簧的线径、直径、有效圈数及材料密度。
3 优化分析算法
菱形HSLDS隔振器优化模型涉及三个优化量,需采用多目标遗传算法(MOGA)进行优化。NSGA-Ⅱ算法[8]采用快速非支配排序与拥挤度排序算法,将父代与子代合并处理,保留了所有精英个体,具备较高的优化效率,是目前广泛应用的MOGA算法。
在优化分析中,为使分析贴近工程应用,设定负刚度机构拉簧的线径d与直径D参数符合标准[9]。由于拉簧参数不连续,同时受几何参数以及材料极限应力限制,有效参数的分布并不是连续、均匀的。经典NSGA-Ⅱ算法的下一代个体选择机制,并未考虑级别靠前的非支配层中精英个体分布的均匀性,若直接应用于本分析,将导致Pareto前沿搜索效率存在显著的区域性差异。针对此问题,采用文献[10]提出的目标空间分区域优化、搜索策略,即将目标区域分为若干个子区域,每个子区域单独地进行遗传运算,确保目标空间各区域获得相似的搜索效率。
3.1 区间划分方法
菱形HSLDS隔振器Pareto最优解在目标空间中分布并不具备对称属性,文献[10]中所介绍的超球面分区方法,难以较均匀地分割解的分布空间。考虑到三个目标函数的关重差异性,可以采用降维的分区方法:以表征隔振性能的两维数据进行目标空间划分,如图4所示。在一个空间象限中,依据角度,i等分归一化数据所构成的平面象限,并以平面角度将空间象限等分为i个子空间:Q1~Qi。子空间数目可根据数据分布情况确定,本应用中选用6子空间划分。
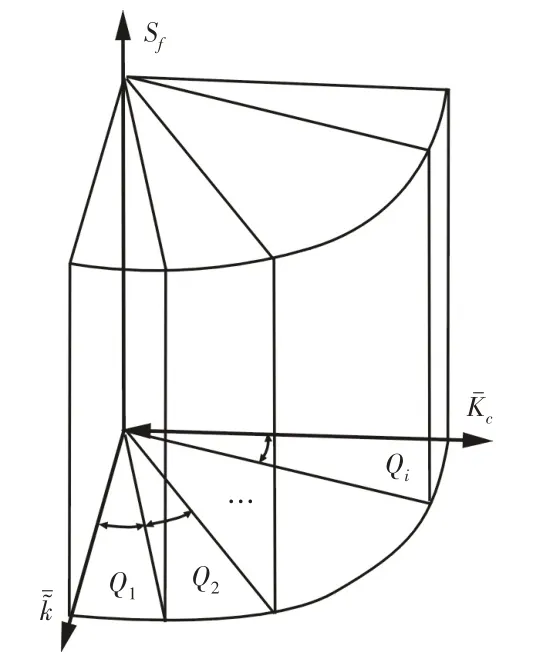
图4 目标空间分区示意图Fig.4 Diagram of Object Space Partition
3.2 分区遗传算法
第一步,数据初始化,设定总初始种群数N,并根据子区域数进行等分,使每个子区域内的种群个体数目一致。
第二步,每个子区域种群内部进行交叉、变异;对每个子区域i,随机产生数量为当前子种群数ni的20%的全局新个体,并随机挑选子区域i内的个体,与新产生的全局个体进行交叉处理。
第三步,对所有新产生的个体进行分区,与各子区域原有的个体合并,组成新的子区域种群。
第四步,对各子区域种群分别进行非支配排序,挑选优秀个体作为下一代种群个体。挑选一下代个体过程中,存在三种情况:
(1)子区域中的非支配个体数小于子区域初始个体数。
(2)子区域中的非支配个体数不小于子区域初始个体数,且第一级非支配层个体数不大于子区域初始个体数。
(3)子区域中第一级非支配层个体数大于子区域初始个体数。
①第1种情况,多出现于初始阶段计算中,处理方法是:随机产生新个体,保证该子区域内的有效个体数不少于初始个体数。
②第2种情况,处理方法与经典NSGA-Ⅱ算法一致。
③第3种情况,当该子区域内第一级非支配层个体数不大于2N时,保留第一级非支配层的所有个体;当第一级非支配层个体数大于2N时,则对个体进行拥挤度排序,挑选间距较大的2N个第一级非支配层个体进入下一代,避免计算规模过大。
第五步,遗传代数如未达到指定代数,转入第二步,否则输出当前代数据。
算法采用实数编码方式,交叉处理采用正态交叉算子[11],交叉概率为0.9;变异处理采用多项式变异算子[12],变异概率为0.1。
4 优化分析算例
某应用,隔振负载为12kg,在该负载作用下,主隔振器的谐振频率13Hz,隔振平台最大相对位移≥12mm。拉簧参数选用标准[9]附例中的公式计算,设定拉簧为碳素弹簧钢材质,材料的切变模量G=7.9×104MPa,初始拉力f0=0。
初始方案参数,如表1所示。

表1 初始方案参数Tab.1 Initial Parameters
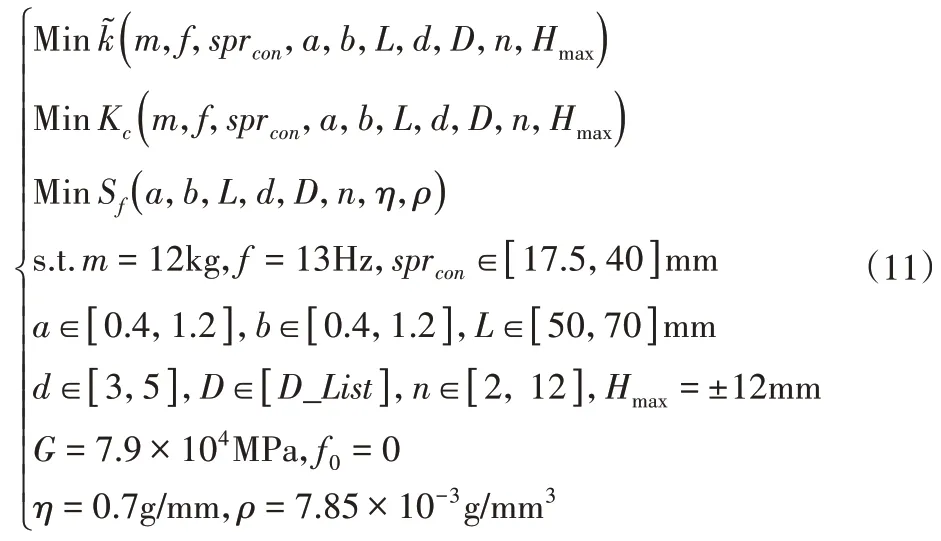
对上述应用进行参数优化分析,优化数学模型,如式(11)所示。拉簧选择标准[9]中线径为(3~5)mm对应的所有型号,拉簧有效段圈数n的步进调节量为0.5圈;连杆采用铝合金材料,根据形状设定质量因子η=0.7g/mm。
设定总初始种群数N=300,经过300 代计算后得到Pareto最优解集,如图5所示。
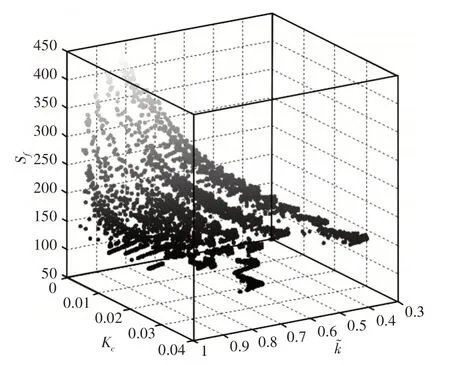
图5 Pareto最优解图示Fig.5 Diagram of Pareto Optimal Solutions
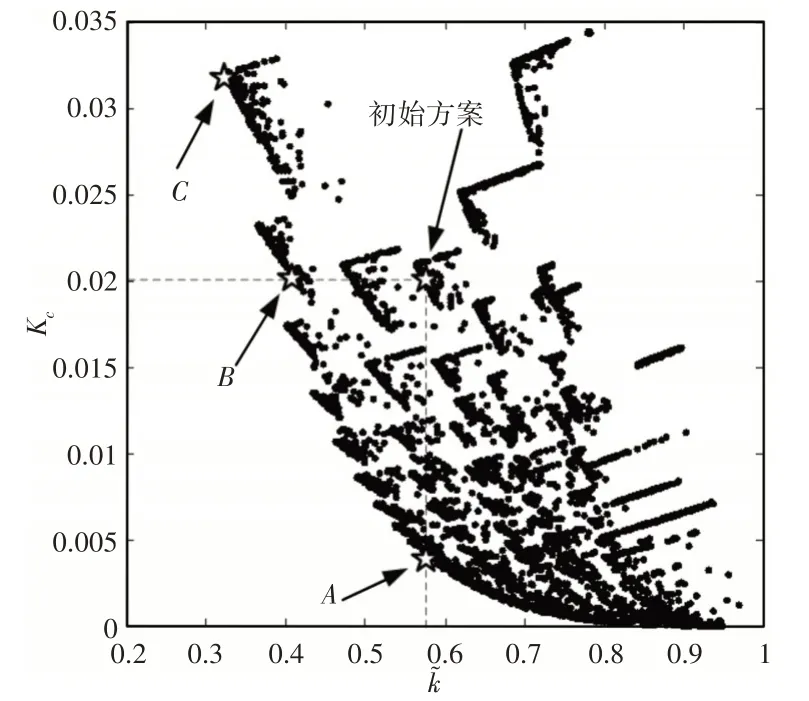
图6 Par eto最优解-Kc平面投影图Fig.6 Pareto Optimal Solutions Projection on -Kc Plan e
5 参数选择分析
获得Pareto最优解集后,需要从中选择一个可以应用于工程设计的参数。为确定参数选择策略,在Pareto最优解中选取三个有代表性的参数点,如图6、表2所示。其中,A点的及B点的Kc分别与初始方案对应的数据相等,C点为Pareto最优解中最小的数据点。

表2 Pareto最优解数据Tab.2 Pareto Optimal Solutions Data
采用MSC.ADAMS 软件对上述参数的隔振性能进行分析。鉴于HSLDS隔振器的非线性特征,分析方法是:将谐波振动施加于振动基座,采集振幅稳定后、一段时间内的隔振平台位移量值,对数据进行均方根处理,得到隔振输出,并以绝对位移传递率作为隔振性能评价参数。
设定主隔振器阻尼为0.19N.s/mm,输入扰动加速度幅值为1.4g,对多频点进行采样,得到隔振器位移传递率图谱,如图7所示。谐振点参数,如表3所示。从中不难看出,Pareto最优解集中A、B、C三组方案对应的隔振性能均优于初始方案,其中方案C,零位刚度最小,隔振优化效果最佳,说明零位刚度在两种隔振性能评价参数中起主导作用;在相同零位刚度条件下,较小的零位曲率可以获得更好的隔振性能,方案A与初始方案参数曲线,如图7所示。

图7 隔振器位移传递率图Fig.7 Isolator Displacement Transfer Rate Diagram
6 实验验证
实验采用等效方式进行:隔振载荷为6kg,主隔振器与有效负刚度机构数量均缩减为2个且对称分布,另一对不含拉簧的菱形连杆机构,起约束运动、实现无角位移垂向隔振的作用。实验平台,如图8所示。加速度幅值为1.4g的扫频曲线,如图9所示。其中ɑ、b、c、d、e分别对应主隔振器、初始方案、方案A、方案B以及方案C的扫频数据,谐振点参数,如表3所示。
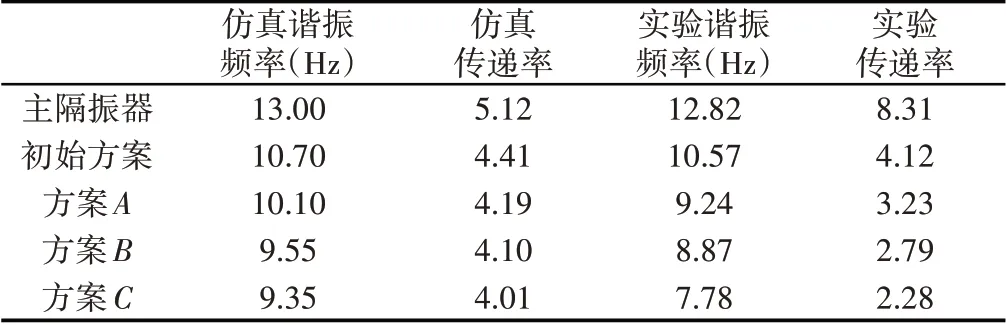
表3 谐振点参数Tab.3 Resonance Point Parameters

图8 隔振实验平台Fig.8 Vibration Isolation Experimental Platform

图9 扫频位移传递率曲线Fig.9 Displacement Transfer Rate Curves of Sweep Frequency Vibration
谐振频率的实验与仿真数据吻合得较好。谐振频率实验数据小于仿真数据是由两部分因素导致的:(1)拉簧存在一定初始应力,使实际零位刚度小于计算数据;(2)负刚度机构质量对隔振存在影响。初始方案至方案A、B、C的传递率实验数据对比仿真数据依次降低,说明随着负刚度拉簧力的增加,负刚度机构的内部摩擦力对隔振影响逐渐显著,相关内容将在后续论文中进行讨论。
7 结论
分区搜索的NSGA-Ⅱ算法,可以有效应用于参数不连续、分布不均的多参数优化问题,较好地获得菱形HSLDS隔振器参数的Pareto最优解集;采用动力学仿真方法对最优隔振参数的选择进行分析,并以实物样机验证了所提方法的有效性。得出以下结论:在表征隔振性能的两参数中,零位刚度起主导作用,零位刚度越小,或零位刚度一致情况时,零位曲率越小,隔振器低频段隔振性能越好;同时,选择较小零位刚度,可兼顾降低负刚度机构所产生的附加质量。
所提出的分析方法,不仅可应用于菱形HSLDS隔振器设计优化,对其他类似非线性隔振器的工程设计及优化也较好的参考价值。