一种大数据和即时建模的汽车避障控制方法
2021-07-24黄中友张永棠
黄中友,张永棠,2
(1. 广东东软学院 计算机学院,广东 佛山 528225;2. 南昌工程学院 江西省协同感知与先进计算技术研究所,江西 南昌 330003)
0 引言
汽车自动操作是很多公司和研究小组积极地研究的课题[1-3]。自动操作技术包括自动避障、自动制动、自动停车、自动驾驶、自动跟踪等。另一方面,大数据是各种研究领域的热点,是智能控制的基础[4-6]。文献[7]将大数据技术应用于汽车的自动操作问题。然而,从大数据的角度来看,自动操作技术的研究数量很少。在未来的大数据时代,大数据技术在自动驾驶汽车的实际利用方面是非常需要的。
我们研究了一种基于大数据和即时建模的汽车碰撞障碍控制方法。在即时建模技术中,我们将包含系统的大量输入和输出数据的数据库视为系统的数学模型,并且我们通过使用来自数据库的一些提取数据来计算控制输入[8-9]。也就是说,即时建模是大数据的应用之一。在文献[7][10]提出了一种基于大数据和即时建模的汽车避障控制方法,并表明该方法可以计算出一种可以使汽车避开遇到障碍的控制输入。然而,在某些情况下,汽车随着障碍物的运动而移动,因此控制方法存在改进的空间。
为此,本文在阐述关于汽车避障控制问题的数学模型。在即时建模的基础上开发了一种新的有效的汽车避障控制控制方法,通过数值模拟仿真,验证了该新方法的有效性。
1 问题描述
在本节中,将介绍汽车避障控制问题的问题表述。本研究将二维平面上的下一个非完整汽车模型视[11-12]为汽车的数学模型:

其中(x,y)是汽车的中心点,θ是汽车的航向角。另外,u1,u2是控制输入,如图1所示,其中u1是航向角方向的速度,u2是角速度。

图1 汽车的描述示意图Fig.1 The setting of a car
接下来,我们对障碍物的设置进行描述。假设障碍物的形状是圆形的,并且障碍物的半径Ro> 0 ,障碍物的中心位于x轴的坐标点为(Xo,0),且Xo> 0 。如图2所示。

图2 汽车和障碍物Fig.2 A car and an obstacle
假设控制输入u1,u2,其表现形式为:
其中Vc是汽车的恒定速度,A是增益,Tc是避让时间。必须注意的是,如果将式(2)的控制输入应用到式(1)的汽车数学模型,则汽车的行驶路径如图3所示。也就是说,汽车以避开障碍物的方式行驶,然后返回x轴。
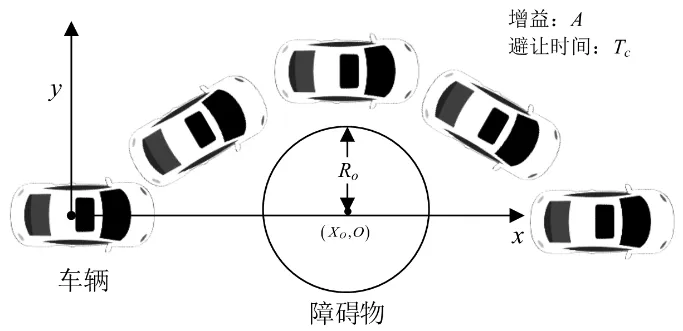
图3 汽车的避障控制Fig.3 Obstacle avoidance control for a car
在本研究中,我们考虑了以下汽车避障控制问题。即:对于一组给定数据,汽车速度和圆形障碍物,,在式(2)中找到控制输入u2的增益A*和避让时间,这可以避免汽车与障碍物的碰撞。如果增益A和避让时间Tc的值不适合,则汽车与障碍物碰撞。为此,我们将研究一种基于即时建模的新方法,作为上述避障问题的解决方案。
2 避障控制的即时建模方法
2.1 建模概述
在本节中,将开发一种基于即时建模(Just-in-Time Modeling)的汽车避障控制的新方法。首先,对即时模型进行简要的概述,具体即时建模算法的实现步骤如下:
Step.1构造一个包含系统输入输出数据的数据库;
Step.2为了计算查询数据的输出,提取查询数据的一些邻域数据;
Step.3从获得的邻域数据导出查询数据的局部线性模型;
Step.1使用局部线性模型,计算查询数据的输出。
图 4展示了即时建模的示意图。即时建模的优点:我们不推导控制系统的数学模型,它不仅适用于线性系统,而且适用于非线性系统;并且可以减少查询数据输出的计算量[13-15]。
2.2 数据库构建
我们首先要构建一个关于汽车避障的数据库,并且确定数据库的范围。

图4 关于即时建模的说明Fig.4 An illustration on just-in-time modeling






其中Nfail是未实现避障控制的数据的数量。数据库中的数据量对即时建模中的控制性能和计算量有较大影响。
2.3 增益和控制时间的计算




算法描述如下:


提出的基于实时建模的方法的优点是:(1)一旦建立了包含车辆输入和输出数据的数据库,就可以用数据库计算出能够实现各种遇到障碍物避障的控制输入,避免了复杂数学模型;(2)算法不需要复杂的计算,只需要简单的算法,如四个基本算术运算符和排序,从而实现实时控制。
将基于即时建模的汽车避障控制过程如图 5所示。
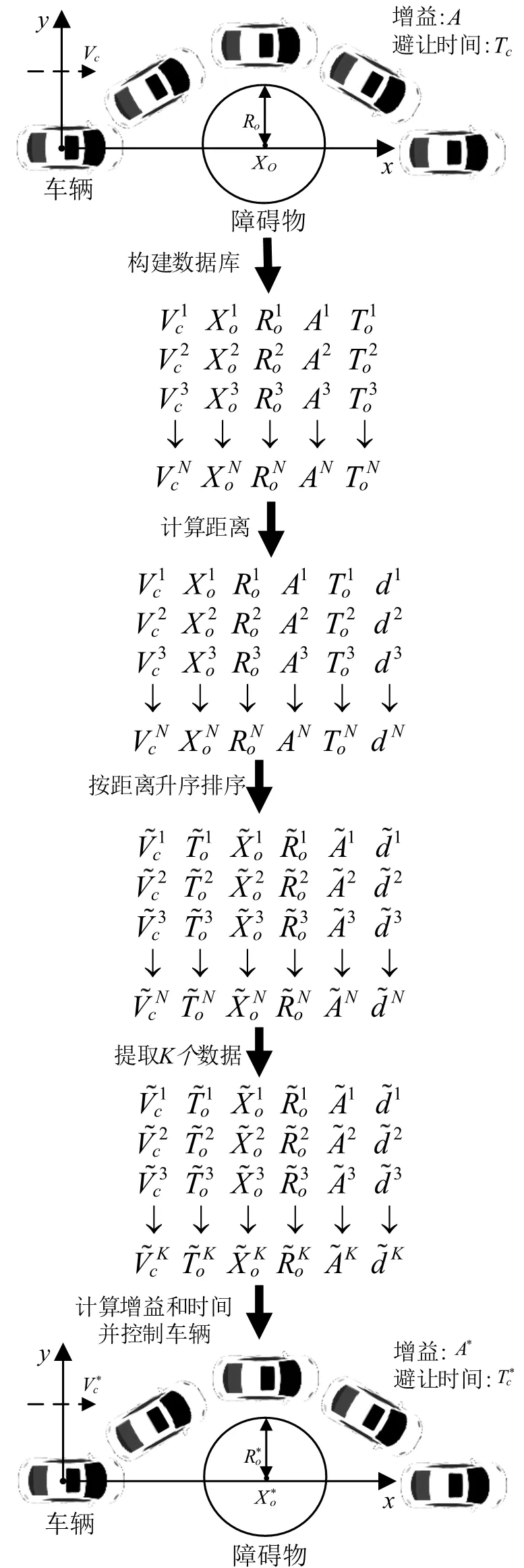
图5 通过即时建模控制汽车的障碍物Fig.5 Obstacle avoidance control of a car via just-in-time modeling
4 数值模拟
通过数值模拟及仿真,证实所提方法的有效性。首先,构建了用于即时建模的汽车避障的数据库。为了构建数据库,将输入数据的范围设置为表1。


表1 用于构造数据库的参数设置Tab.1 The parameter settings for construction of a database

表2 获得的数据库的一部分Tab.2 A part of the obtained database
应用本文构建的数据库及提出的算法,我们按照表3的仿真参数设置,进行了6次数值模拟及仿真实验,结果如图6所示。从图上汽车在xy平面上的轨迹可以看出,汽车可以在各种情况下避开障碍物。同时也证明了所提出的控制方法计算时间短。
为了验证汽车的移动效率,我们将本文所提出的方法与文献[7]的方法进行比较。文献[7]方法中,控制时间Tc作为输入,输出仅为增益A。图7描述了表3中前三个(No.1~No.3)模拟数值的文献[7]的仿真结果。对比图6(a)~(c)与图7(a)~(c)可以看出,本文提出的方法汽车的行驶效率较高,产生的避让损耗较少。因此,本文提出的避障控制方法是有效的。

表3 模拟数值设置Tab.3 The simulation settings

图6 本文方法的数值模拟结果Fig.6 Numerical simulation results by the new control method

图7 文献[7]的数值模拟结果Fig.7 Numerical simulation results of reference [7]
5 结论
在本文中,通过即时建模开发了一种新的汽车避障控制方法。新的控制方法可以计算控制输入的增益和控制时间,以避免遇到障碍,计算时间短。通过一些数值模拟,表明汽车可以避开各种障碍物,因此可以检验所提方法的有效性。此外,与先前文献方法产生的汽车相比,本文所提出的新方法产生的汽车的运动更有效。未来我们将基于大数据和即时建模对移动障碍物的自动停车和自动驾驶的做扩展研究。
