基于Ackermann转向原理的循迹控制研究
2021-07-16陈永发池茂儒郭兆团赵昀陇
陈永发,池茂儒,郭兆团,赵昀陇
基于Ackermann转向原理的循迹控制研究
陈永发,池茂儒,郭兆团,赵昀陇
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
为了对虚拟轨道车辆的控制方法进行研究,本文针对三编组虚拟轨道列车,建立了车辆多体动力学模型,并从车辆动力学角度出发提出了基于Ackermann转向原理的多编组列车循迹控制方法,结合模糊控制理论与PID控制理论利用Simulink构建了车辆模糊循迹控制模型。通过联合仿真证明基于Ackermann的单轴协调控制虽然从运动学角度上不能实现完美的各车轮“纯滚”过弯,但可以对首尾车进行较好的约束,从而达到较好的一个控制精度,且各轴的转向控制设计时考虑到整车动力学性能,前后轴转角采用同一基线(动车的车铰侧垂线),保证了车铰处瞬时速度与动车各轴耦合,一定程度上改善了整车动力学性能;控制模型符合虚拟轨道车的循迹控制要求。
虚拟轨道列车;Ackermann转向原理;循迹控制;模糊控制
交通是城市的命脉,道路规划、交通改善也在反映着一个城市的变迁和发展[1]。随着国民GDP水平的提高,我国机动车保有量持续增长[2],极大地方便了居民出行,但交通拥挤、环境污染、噪声污染等问题也凸显了出来,公共交通的需求量大大增加。
城市轨道交通以其运量大、速度快、乘坐环境舒适等优点受到大众欢迎,但其相对于公交车对道路和运行环境比较低的要求,城市轨道交通的缺点也被放大。轨道交通需要专用的基础设施和配套设施,线路规划、桥梁隧道建设、轨道铺设以及后期维护都需要投入大量的人力物力,运行初期往往无法盈利,因此一些中小型城市根本无法承受。而公交车虽然其灵活性好且基础设施及运行维护成本低,但是面对日益加快的城市化进程和居民出行量的飞速增长,其运量远远不能满足人们日常出行需要。因此目前城市急需一种运量大、速度快、舒适性好、成本较低的公共交通运输系统,在这样的大环境下虚拟轨道列车应运而生。虚拟轨道列车作为一种新型的公共交通运输系统,是轨道车辆与传统汽车的一次融合创新,它将轨道列车运量大、乘坐环境舒适的优点与传统汽车运行灵活、运营成本低的优点结合起来,既能保证大运量,又能减少基础设施建设的投入。
作为一种新型轨道交通工具,其循迹控制效果决定着车辆的安全性和舒适性[3-4],因此对循迹控制进行改进优化具有十分重要的意义。考虑虚拟轨道车的小曲线通过性要求[5-7],基于列车动力学的控制要协调车辆之间的关系使车辆摆动、摇头运动次数尽可能少,幅度尽可能小[8];各车轮之间的耦合也要考虑在内,避免车轮发生侧滑引起加速轮胎磨耗、降低车辆行驶稳定性等问题。基于以上控制要求,本文以Ackermann转向理论为基础,设计Ackermann单轴协调控制方法并进行优化。
1 车辆编组模型
本文通过Simpack多体动力学软件建立起虚拟轨道车辆的动力学模型[9-10],如图1,车辆为三编组形式,其中首尾车为动车,采用双横臂独立悬架,中间车为浮车,通过车间铰与前后动车连接。其优点在于:中间浮车下方无悬架结构,降低车体地板面的同时使地板更加平整、宽敞,客室座椅布置更加方便,选择性更多;浮车相当于二力杆位于首尾车之间,相较于三编组铰接形式,该布置方式使得车辆之间的运动干涉较小,车辆转向性能更好;曲线上各车车轮更易趋于纯滚,车辆与轮胎横向动力学性能更好,轮胎磨耗较小。
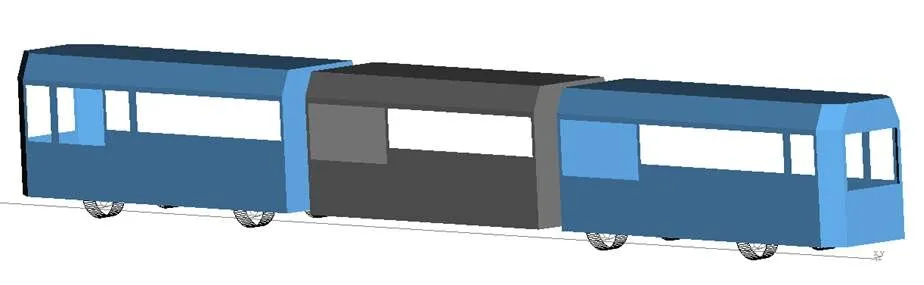
图1 三编组浮车虚拟轨道车示意图
2 Ackermann 转向原理
Ackermann转向原理的基本思想为车辆在转弯时,每个车轮的运动轨迹均符合自然运动轨迹,也即各车轮处于纯滚动状态,避免轮胎侧滑、胎地侧向力大、车辆操稳性变差、轮胎磨耗加剧等动力学问题。在这种状态下,同轴内外车轮转角不同,且所有车轮路径的圆心相交于同一圆心,其转向原理示意图如图2所示。
图2 Ackermann转向原理示意图
因此,在车辆设计之初就要根据车辆的车轮横向跨距、车轴跨距、转向中心设计等因素对车辆转向结构进行设计,使之符合Ackermann转向原理,本文的循迹控制策略正是结合该原理同多编组列车协调模式进行研究。
3 Ackermann单轴协调控制
Ackermann双轴单轴协调控制为单轴自耦合模型,每个车轴各一个转向中心并由其确定左右车轮转角。为了使动力学性能更优,对单车转向中心基线进行限制,使首尾车车铰减少横向运动,提高车辆横向动力学性能。因此将车铰横轴线设置为基准线,控制其转向中心始终在基准线上,这样可以使动车的车铰始终中沿车辆纵向方向运动。在此控制方法下,各车轮转角关系如图3所示。
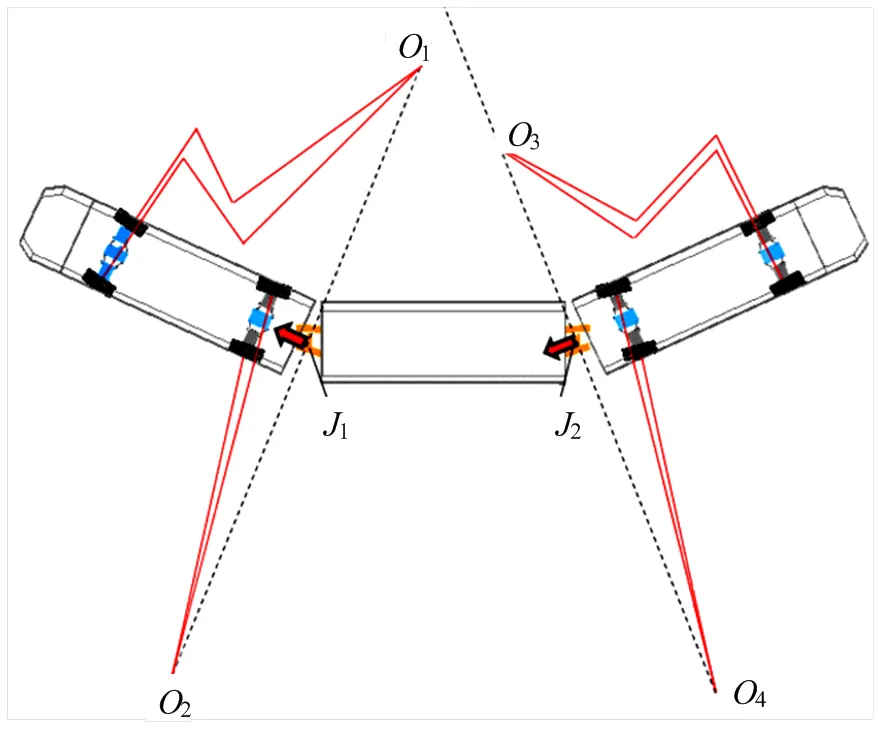
O1、O2、O3、O4为各轴车轮转向中心;J1和J2为头车与尾车的车铰。
由于车辆各轴耦合,只需要通过Ackermann转向原理将各轴左右车轮转角关系建立便可,其转向几何原理与Ackermann双轴同向协调控制类似,如图4所示。
通过图4可以得出各车轮之间的转角关系如下[11]:
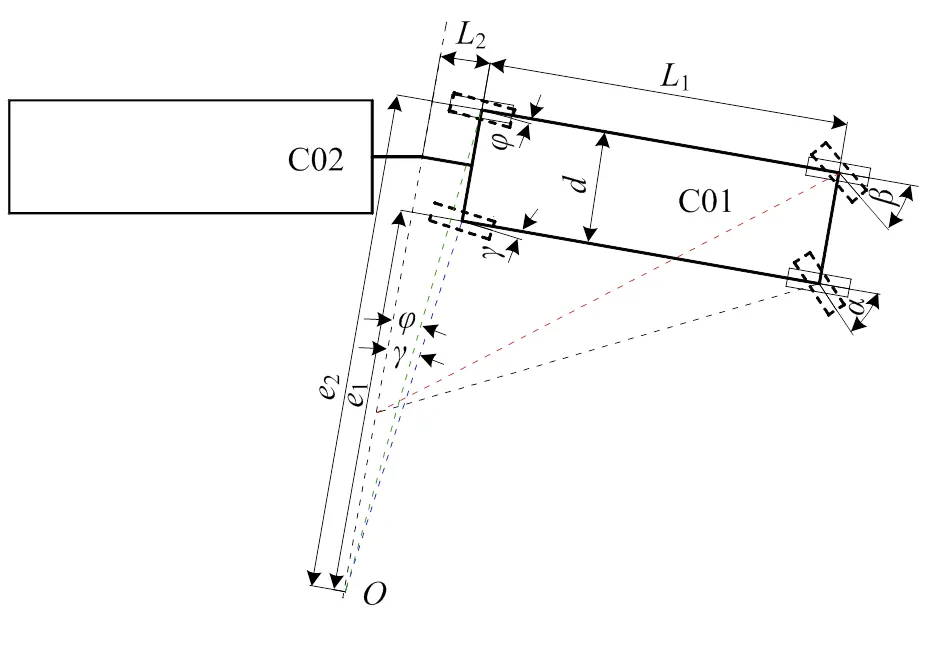
L1为头车轴距,m;L2为后轴到车铰的距离,m;d为轮距,m;α为前轴内轮转角,m;β为前轴外轮转角,(°);γ为后轴内轮转角,(°);φ为后轴外轮转角,(°);e1为二轴内轮到其转心的距离,m;e2为二轴外轮到其转心的距离,m。
一二轴采用相同基线,这样做可以使头车的车铰速度方向沿车辆纵向线向前,避免了将车辆的横摆运动向后面车辆传递,且前后轴均有其独立的转角控制的前提下保留了一定耦合关系,保证车辆与车轮以一种较优的姿态通过曲线。在此控制理论下,各车轮转角以各轴横向偏差为参考确定,能够更好地保证车辆循迹精度,实现较好的车辆循迹控制。
4 控制模型
4.1 控制器选取
虚拟轨道车作为一种新型轨道交通工具,与多铰接公交车相比最大的区别在于其独特的自导向技术,在公路上按预设的既有线路进行循迹前进,由于车辆编组较长,考虑到虚拟轨道车的小曲线通过性要求,避免列车在狭窄路段发生刮擦,若采用人工驾驶对车辆进行控制,不仅精度偏低且容易失误引发交通事故,因此采用全轮电控转向对车辆进行控制。基于列车动力学的控制要求车辆不仅需要沿预设轨道进行自动循迹,而且要在曲线通过时协调车辆之间的关系使车辆摆动、摇头运动次数尽可能少,幅度尽可能小;各车轮之间的耦合也要考虑在内,避免车轮发生侧滑引起加速轮胎磨耗、降低车辆行驶稳定性等问题。
PD控制器控制简单、控制精度高、参数少易于调整等优点,在工业生产中被广泛应用[12-14]。控制系统动态模式的精确程度是影响控制效果的主要因素,但对于复杂的系统,难以对系统动态进行精确描述,传统控制效果也不理想,而模糊控制作为一种非线性智能控制,通过模糊逻辑对系统进行描述,建立模糊规则库,可以很好地反映系统动态模式并对系统进行控制。考虑到虚拟轨道列车是一个复杂的非线性系统,对其动力学模型进行控制除了要考虑系统参数,还要着重关系其复杂多变的运行环境,因此本文通过PD控制器并结合模糊控制方法对虚拟轨道列车的循迹进行控制。
4.2 模糊控制器建立
(1)输入输出量及其隶属度函数的确定
输入语言选择车辆循迹横向偏差和车速,输出语言变量为控制器比例系数和微分系数。首先对输入参数进行模糊化处理,理论上循迹偏差论域范围取[-∞,∞],但实际上循迹偏差在控制器作用下会进行修正,偏差范围不会无穷大,根据经验循迹偏差论域范围取[-0.05,0.05],单位为m,循迹偏差模糊集语言定义为{NB,NS,ZE,PS,PB}五个等级。车辆最大运行速度为80 km/h,因此速度论域范围取[0,80],单位km/h,车速模糊集语言定义为{低速,中速,高速}三个等级。输出模糊语言定义为{NB,NM,MS,ZE,PS,PM,PB}七个等级,的量化论域范围为[-1500,1500],的量化论域范围为[-800,800],隶属度函数及其论域范围如图5所示。
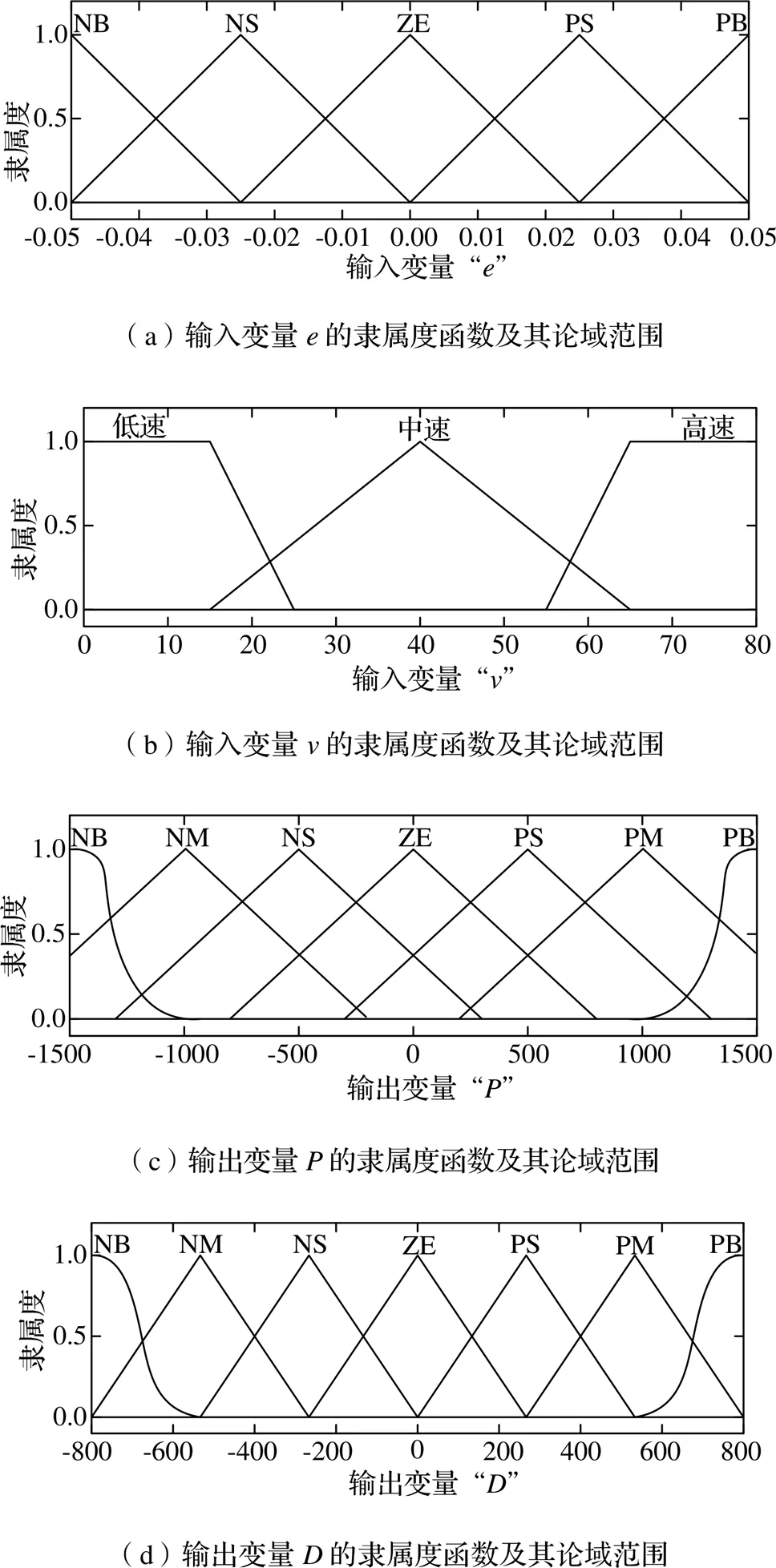
图5 变量隶属度函数及其论域范围
(2)模糊控制规则的确定
模糊规则的建立主要基于驾驶员的驾驶经验,当车辆循迹无偏差时,保持方向盘状态,当车辆出现较大偏差时,若车速低,迅速打方向盘进行校正;若车速快则降低打方向盘的速度。对应到PID控制器上,其模糊控制原则如下[15]:
①当偏差量较大时,取小避免偏差瞬间变大导致微分溢出,若车辆速度较低,取大以提高系统响应速度;若车辆速度较高,取小以降低系统响应速度。
②当偏差量中等大小时,取适中即可,而应适当减小,保证系统响应速度,减少系统的超调量。
③当偏差量较小时,与取小以维持系统稳定。
根据以上原则结合驾驶员经验得到模糊控制规则表,如表1、表2所示。
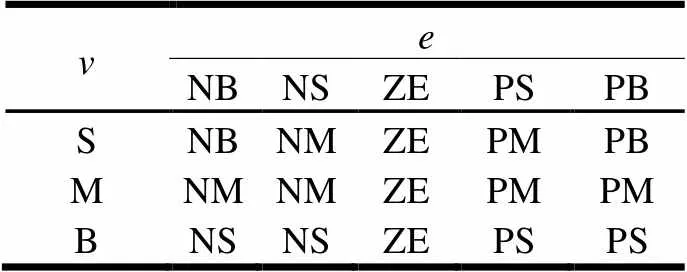
表1 比例系数P控制规则矩阵
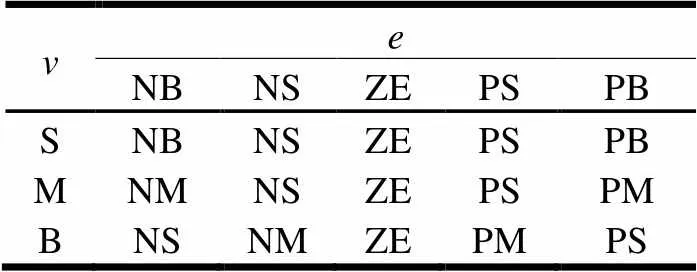
表2 微分系数D控制规则矩阵
(3)控制量解模糊化
解模糊化后便可通过基于模糊控制的PD控制器对车辆进行循迹控制,运用Simulink软件搭建模糊控制器并定义模糊控制规则,得到模糊控制表面如图6所示。
4.3 控制模型建立
控制器控制流程如图7所示,车辆将实时车速和车辆横向位移输入到控制器,在控制器中处理得到车辆横向偏差以及直接测得的实时车速导入到模糊控制器,通过模糊控制器完成模糊化、模糊规则计算以及解模糊等过程得到PD控制器需要的与,将得到的和以及循迹偏差导入PID模块,运用其中的PD控制模块根据控制参数与横向偏差得到车轮转角信息,最后通过单轴协调控制理论得到各车轮转角并输入到虚拟轨道列车模型实现循迹控制仿真。
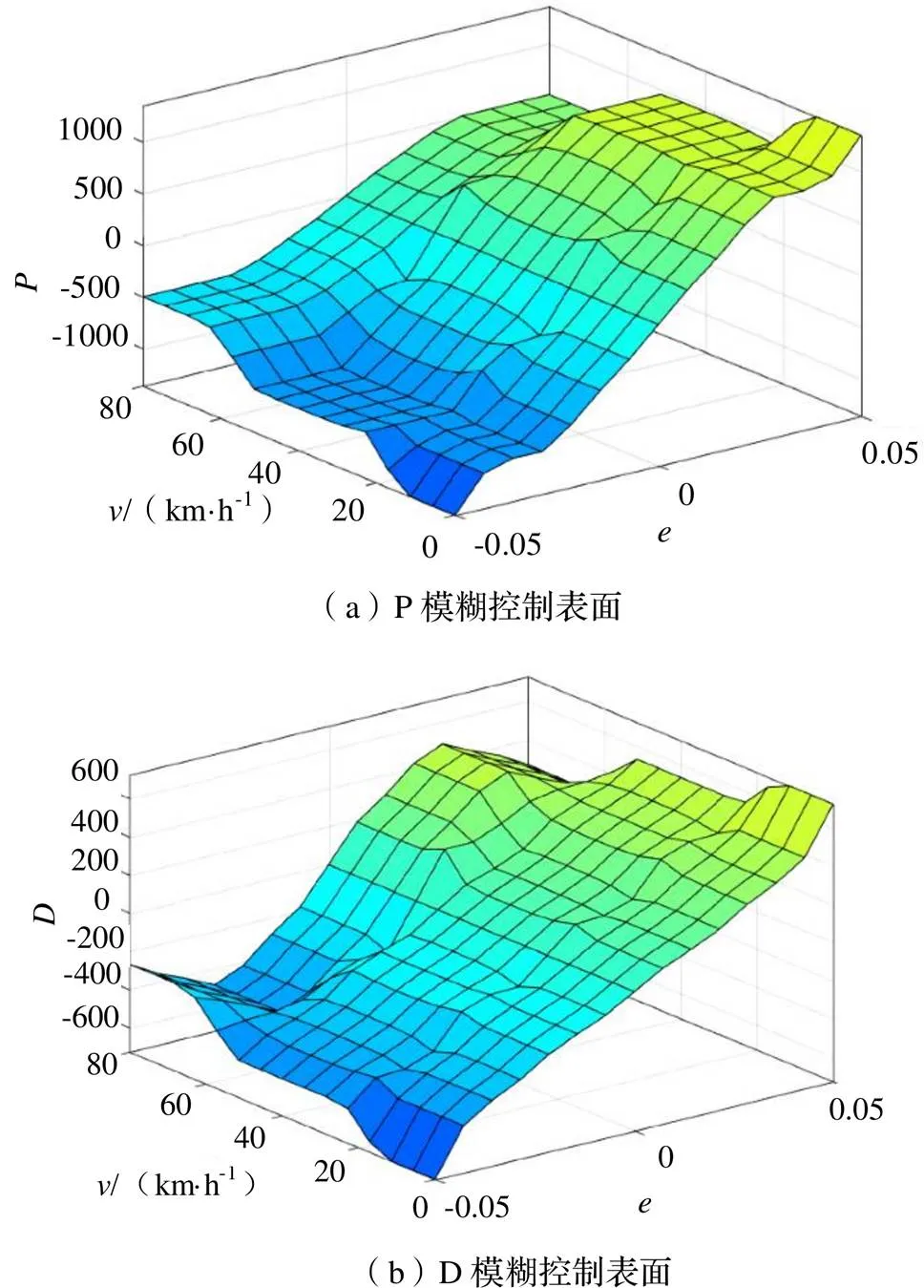
图6 双输入单输出表面
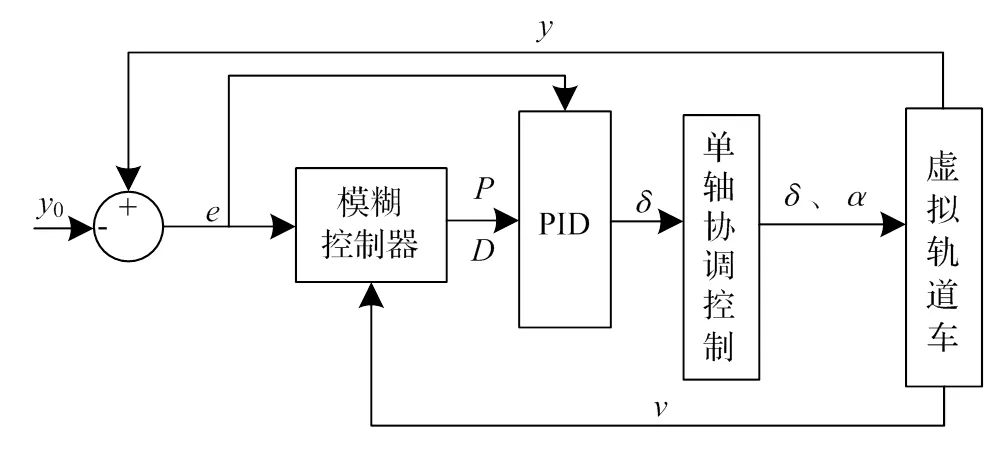
图7 系统仿真流程图
5 控制结果及优化
Ackermann单轴协调控制下,通过对动车前后车轴附近循迹点的横向偏差进行反馈循迹控制,可以对动车整体姿态进行约束控制,避免动车后轴横向偏差较大的问题,而且单车两轴并不是完全解耦状态,通过对转向基线进行控制,最大程度保证车辆曲线通过性能以及中间浮车的动力学性能。通过该控制理论对车辆进行循迹控制的仿真,图8为车辆以14 km/h速度通过20 m曲线下各轴横向偏移量。
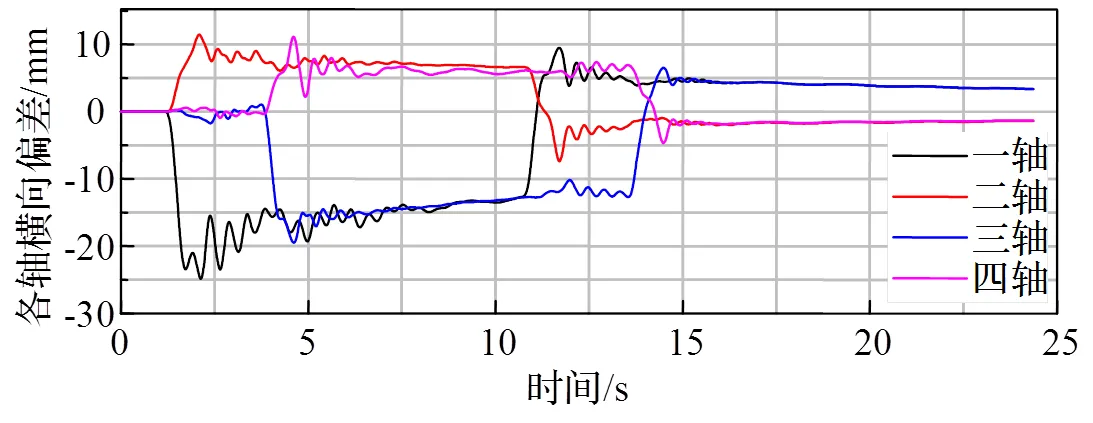
图8 Ackermann单轴协调控制仿真结果
通过仿真结果可以发现,各轴车轮速度与转向角度均符合预期的车辆通过曲线运动状态;通过曲线时稳态车轮转角变化幅度小,车辆横向稳定性好;通过该20 m曲线时,车轴最大横向偏移量在2.5 cm以内,循迹性能优秀。
6 结论
(1)虽然基于Ackermann单轴协调控制从运动学角度上不能实现完美的各车轮“纯滚”过弯,但通过对动车前后两个循迹点的偏移量进行控制,便可以对首尾车进行较好的约束,从而达到较好的一个控制精度;
(2)虽然称之为“单轴协调”,但在各轴的转向控制设计时对基线的选取有考虑到整车动力学性能,在一定程度上改善了整车动力学性能;
(3)基于Ackermann单轴协调控制可以较好的满足虚拟轨道车辆的循迹要求。
[1]夏驰雨. 我国西部大城市公共交通服务质量研究[D]. 成都:电子科技大学,2015.
[2]中国新闻网. 中国机动车驾驶人超4亿2018小汽车保有量首破2亿[J]. 城市交通,2019(2):127-127.
[3]孙超,杨前明,王飞,等. 基于协同模糊控制的四轮驱动AGV稳定性研究[J]. 机床与液压,2020,48(17):162-169.
[4]孙帮成. 虚拟轨道列车及其关键技术研究[D].北京:北京交通大学,2019.
[5] Xiao L , Guo S Y , Yuan X W , et al. Analysis of Vision Based Automatic Steering Control for an Articulated All Wheel Steered Vehicle[C]// 2016 IEEE Vehicle Power and Propulsion Conference (VPPC). IEEE, 2016.
[6]肖超,蒲果,李楠,等. 基于偏差预测模型的车道保持及自动对中研究[C]. 2013中国汽车工程学会年会,2013.
[7]袁希文,冯江华,胡云卿,等. 智轨电车自动循迹感知与控制系统[J]. 控制与信息技术,2020(1):19-26.
[8]曹竞玮. 虚拟轨道有轨电车循迹特性及力矩分配研究[D]. 成都:西南交通大学,2017.
[9]刘永强,戴焕云. 铁道车辆动力学模型设计及优化分析[J]. 机械,2018,45(12):1-3.
[10]贾鹏,池茂儒,李浩天,等. 扭转刚度和扭转阻尼对虚拟轨道车辆性能的影响分析[J]. 机械,2019,46(10):22-30.
[11]刘燕斌,陈晋荣,赵陈闯. 车辆转向梯形建模及优化设计[J].科技风,2016(18):166-167.
[12]何芝强. PID 控制器参数整定方法及其应用研究[D]. 杭州:浙江大学,2005.
[13]王伟,张晶涛,柴天佑. PID参数先进整定方法综述[J]. 自动化学报,2000(3):347-355.
[14]吴宏鑫,沈少萍. PID控制的应用与理论依据[J]. 控制工程,2003(1):37-42.
[15]崔吉,张燕超,段向军,等. 全方位移动机器人模糊PID控制算法研究[J]. 机械,2019,46(8):47-51,80.
Research on Tracking Control Based on Ackermann Steering Geometry
CHEN Yongfa,CHI Maoru,GUO Zhaotuan,ZHAO Yunlong
( State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China )
In order to study the control method of virtual rail vehicles, in this paper, a multi-body dynamics model of the three-carriage virtual rail train is established, and a multi-carriage train tracking control method based on the Ackermann steering geometry from the perspective of vehicle dynamics is proposed, and a vehicle fuzzy tracking control model based on the combination of the fuzzy control geometry and PID control theory is constructed thtough Simulink. The Co-simulation proves that the single-axis coordinated control based on Ackermann cannot achieve a perfect "pure roll" cornering of each wheel from a kinematics point of view, but it can better constrain the front and rear cars to achieve a better control accuracy. In addition, since the dynamics of the whole vehicle is taken into consideration during the steering control design of each axle, the baseline (the vertical line of the hinge side of the motor car) adopted to the front and rear axle angles are the same, which ensures that the instantaneous speed at the hinge is coupled with each axis of the motor car and thus improves the overall vehicle dynamics performance. Also, the control model meets the tracking control requirements of the virtual rail car.
virtual rail train;Ackermann steering geometry;traction control;fuzzy controll
U270.1+1
A
10.3969/j.issn.1006-0316.2021.06.006
1006-0316 (2021) 06-0035-06
2021-01-14
国家重点研发计划(2018YFB1201600、2018YFB1201603-05);牵引动力国家重点实验室自主课题(2018TPL_T04)
陈永发(1996-),男,山东潍坊人,硕士研究生,主要研究方向为车辆系统动力学,E-mail:321041911@qq.com。
