主被动式肠道微型机器人研究进展*
2021-07-14迟明路刘荣升郑华栋周燕飞王元利任沁超钱晓艳任瑞华
迟明路,刘荣升※,郑华栋,周燕飞,王元利,任沁超,钱晓艳,任瑞华
(1.河南工学院,河南新乡 453003;2.郑州轻工业大学,郑州 450002;3.河南轻工职业学院,郑州 450002;4.江苏汇博机器人技术股份有限公司,江苏苏州 215121)
0 引言
消化道疾病历来是人类的高发病症,胃肠道疾病,特别是位于小肠和结肠部分的疾病,对人类健康带来了较大危害。集机器人技术和先进成像技术的无线微型胶囊机器人(以下简称“胶囊”)的出现是消化道疾病诊疗领域的重大突破,完全避免了传统生硬插管检查的痛苦,相比传统内窥镜,胶囊提供了一种全新的无创解决方案[1-3]。医生通过摄像头无线传输图片获得病变组织信息,进行肠道疾病诊断,改变了现有医疗模式,为体内消化道诊察提供了崭新的无创、无痛、诊疗手段,具有广阔的应用前景[4]。
目前,国内外主要有两种胶囊:被动胶囊与主动胶囊。已经商业化使用的被动胶囊主要依靠摄像头传输进行诊断,主要运动形式为依靠人体自身胃肠道的蠕动力[5],配合胶囊的自身重力进行运动,已经广泛应用于国内外医院的胃肠道消化科。虽然相比于主动胶囊,被动胶囊无法主动靠近或离开胃肠道内部病患检查区域,但仍以其原理简单、操作方便和成本较低的特点,备受胃肠医疗消费市场青睐[6]。
另一种主动胶囊正成为现阶段研究人员的热点探索领域,主动胶囊具有行走方向、位置、速度可控的特点,能够与操作医师紧密互动,操作反馈实时性好、定向诊治灵活[7]。能够有效提高诊疗效率,减少非病患区照片拍摄数量,降低漏检率。最重要的是搭载了靶向施药与微型手术的主动胶囊,可以轻松应对消化道内部的病变分析和息肉取样等操作,具有巨大的市场应用潜力。本文分别介绍这两种胶囊的研究进展情况。
1 被动胶囊机器人
被动胶囊最初是由传统的插管式内窥镜发展而来,历经直管内窥镜、半可屈式内窥镜、软式光纤内窥镜、电子内窥镜、胶囊机器人5个阶段。由于传统内窥镜采用从人体口腔或肛门直插人体的方式,令患者苦不堪言、十分畏惧。而通过口服胶囊的方式进入人体,能有效避免直插内脏对人体造成的软组织身体损伤和心理伤害,且操作简单、无痛,因此,各类型的被动胶囊应运而生。国内外常见的被动胶囊利用人体消化道的蠕动推力向下运动[8],依靠无线收发系统传输拍摄图像,如无其他特殊控制操作,可大量节约电能消耗,能够维持长时间工作。
以色列Given Imaging公司在2003年推出了PillCam口服无线胶囊,获得了当年美国食品与药品管理机构(FDA)的许可,该胶囊专为10~18岁年龄段的青少年开发,用于治疗小肠疾病。胶囊随着肠道的蠕动而收缩运动,依靠内部的CMOS相机以每秒2张静止照片的频率拍摄肠内组织照片,电池寿命约为8 h[9-10]。该公司还研制了PillCam ESO和Pill Cam COLON系列胶囊[11]。目前,国内外商业化应用的胶囊公司主要有日本Olympus公司(EndoCapsule)、重庆金山科技公司(OMOM)、韩国Intromedic公司(MiRo capsule)、美国CapsoVision公司(CapsoCam SV1)[12],上述公司的胶囊产品和具体参数对比分别如图1和表1所示。

图1 国内外被动胶囊
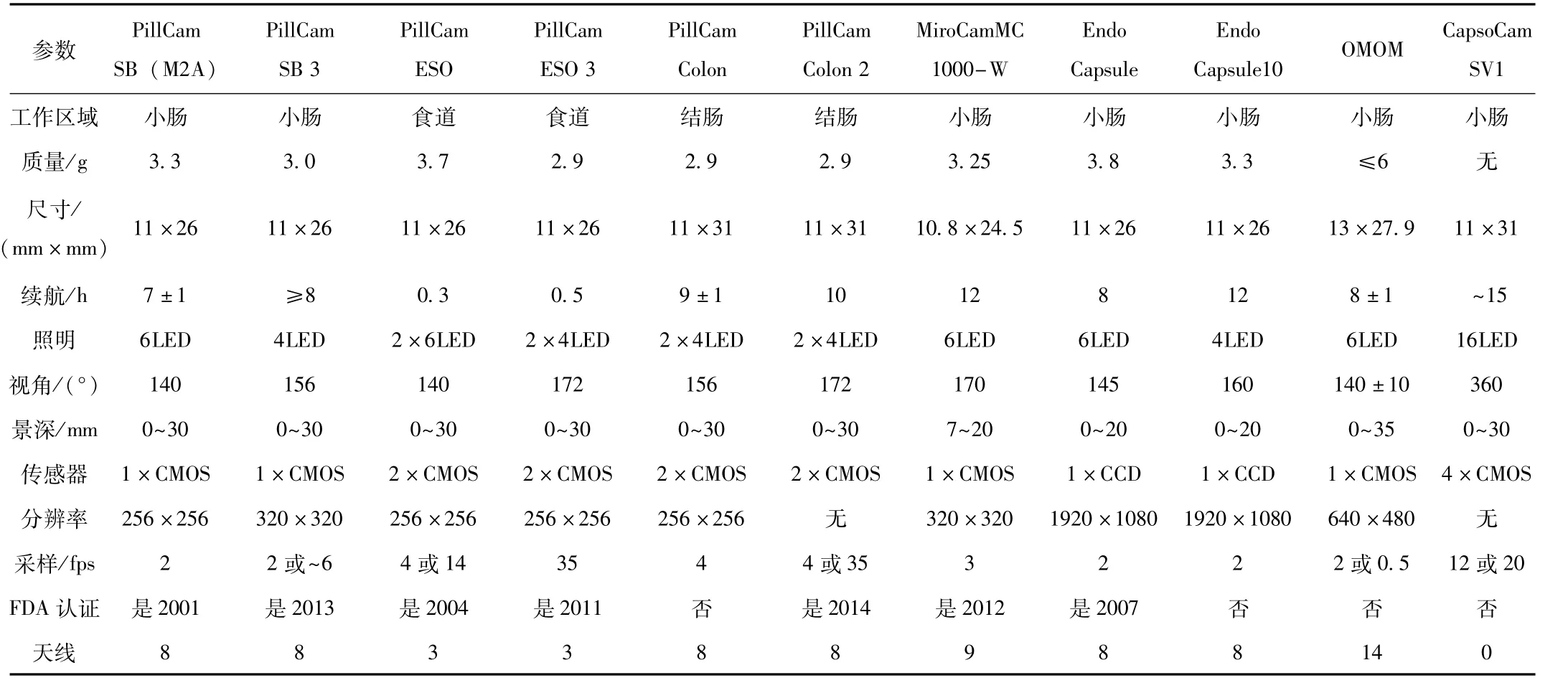
表1 被动式胶囊参数对比
上述胶囊产品均已推向全球医疗市场并成功进行临床应用,能够针对胃肠道疾病产生一定的治疗作用,但仍存在一些问题,例如,拍摄的图像经无线传输时会出现丢失,图像拍摄的随机性较大等问题。目前大部分胶囊的摄像头均在两端,极易受到胶囊姿态和肠道非光滑内壁的影响而无法完整拍摄,会降低病变检出率,导致漏检,图2所示为胶囊摄像头安放位置对比情况。
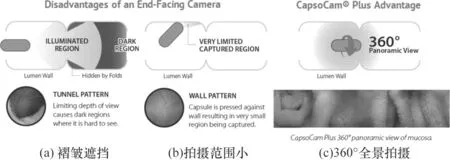
图2 摄像头安放位置对比
因此,美国CapsoVision公司设计了CapsoCam Plus胶囊[13],利用4个CCD镜头安装在胶囊中部形成具有全方位拍摄的功能,拍摄的照片达到212×896像素,拍摄速率20帧/s,电池续航能力长达15 h,胶囊内部集成了闪存盘,拍摄过程中直接存储照片,无需进行无线数据发送,消除了无线信号对内部电路的干扰,并减少了内部体积占用,如图3所示。Jang等[14]研制出一种类似的超轻无线胶囊系统,具有低功耗(<1 mW)、能够高速传输图像(80 Mb/s)的特点,能够连续工作8~12 h。
香港中文大学Leung等[15]研制了一种充气止血胶囊。医学上,常通过填塞效应减少出血量,人体血小板需要(4.5±1.5)min才能有效凝血。对胃肠道的内出血进行止血治疗时,借助酸碱吸热反应产生的气体为气球充气,当气球达到预算值时,停止充气并停留在肠道出血部位处。机器人直径为14 mm,长为60 mm,由酸液注射器、气体发生器、电路模块组成,长度分别为13 mm、35 mm和12 mm,3部分之间由柔性接头连接,密封在硅胶气球中。
Mohammed等[16]提出并设计了一种无线荧光胶囊,用于对人体小肠组织的自体荧光进行成像。该机器人配置468 nm波长的低照明LED,功率为78μW,所有功率消耗由两块1.5 V的纽扣电池维持供电,并在哺乳动物体内进行了荧光成像实验。机器人三维模型分解结构如图4所示,集成了发射器和螺旋天线的14 mm PCB板、FPGA控制器和ASIC成像器等。
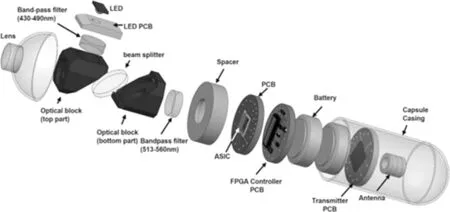
图4 荧光胶囊
Tortora等[17]研发了一种光动力诊疗胶囊,该机器人的治疗原理是:利用蓝光杀菌的有效波长范围375~425 nm,红光杀菌波长范围625~675 nm,对细菌进行30 min的辐照杀菌作业进行灭菌。图5所示为发射红光的胶囊样机(波长625 nm),8个LED为两端布置,外壳由透明聚碳酸酯构成,直径12 mm,长27 mm。由3 V/160 mAh的圆柱形锂电池供电,直径11.6 mm,长10.6 mm,可为8个LED连续供电1 h左右。
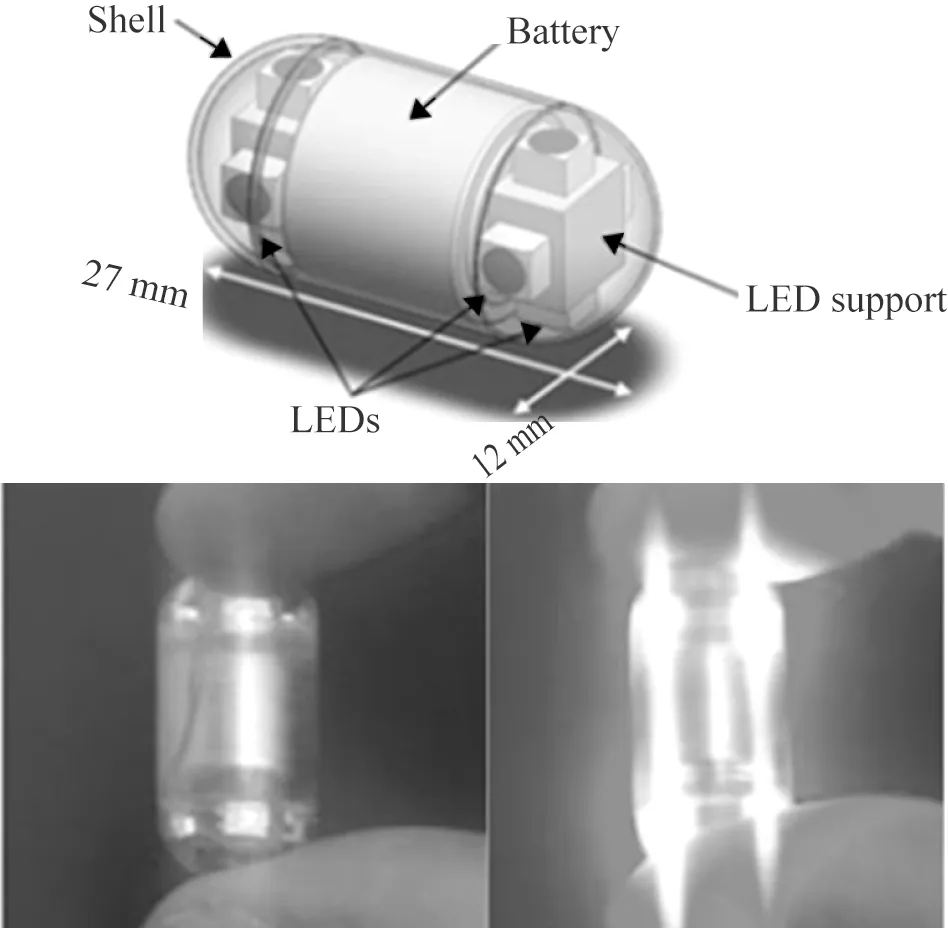
图5 光动力诊疗胶囊样机
综上分析,被动胶囊的主要优点是简单易用,大部分被动胶囊仅由外壳、摄像头、无线收发装置、电池等部分模块构成,甚至还有诊疗模块,例如光学活检。模块化的易用设计使得被动胶囊迅速发展,有效降低了研发及生产成本。
2 主动胶囊机器人
2.1 电力驱动型
De Falco等[18-19]研发了一种电力驱动四螺旋胶囊,主要用于检查胃内较大空间的环境,如图6所示。采用4个电机驱动螺旋桨在尾部推进的方式,选用加拿大Plantraco公司生产的锂电池为螺旋桨供电,电池容量为50 mAh/3.7 V,能量密度200 Wh/kg,尺寸为13 mm×17 mm×5.7 mm,质量为1.5 g,机器人长度为32 mm,最大直径为22 mm,产生的最大推进力为25.5 mN。机器人头部摄像头的图像采样率为30 fps,视频采集系统由一台CMOS微型照相机构成,经过对比聚焦评估测试,能够感知和区分不同颜色。在实验室离体胃组织内进行了试验,机器人电池供电时间可维持13 min。

图6 四螺旋桨胶囊结构
Norton等[20]提出一种带有膨胀收缩臂的轮式微型机器人。通过电缆为机器人传递电力和控制信号,膨胀机构用于调整3个支臂角度,使机器人能够主动适应环境的尺寸和形状,提供足够的牵引力和力矩,每个支臂末端有一个球形轮。行走轮机构用于驱动3个球形轮以获得驱动力,控制机器人在结肠内的位置和方向,每个支臂内都有一个长为6 mm的有刷直流电机和221∶1的减速箱,运动速度为3.85 mm/s。
2.2 磁(电磁)驱动型
张永顺等[21-22]经过多年的探索研究,研发了多种胶囊,图7所示为扭转力矩效应花瓣型胶囊系统[23],该机器人能够以悬浮姿态在肠道内部运动,避免了接触肠道内壁,并提高了转弯游动速度,采用三轴方形正交亥姆霍兹线圈作为电磁驱动系统,可以实现空间内任意姿态的调整和驱动行走。
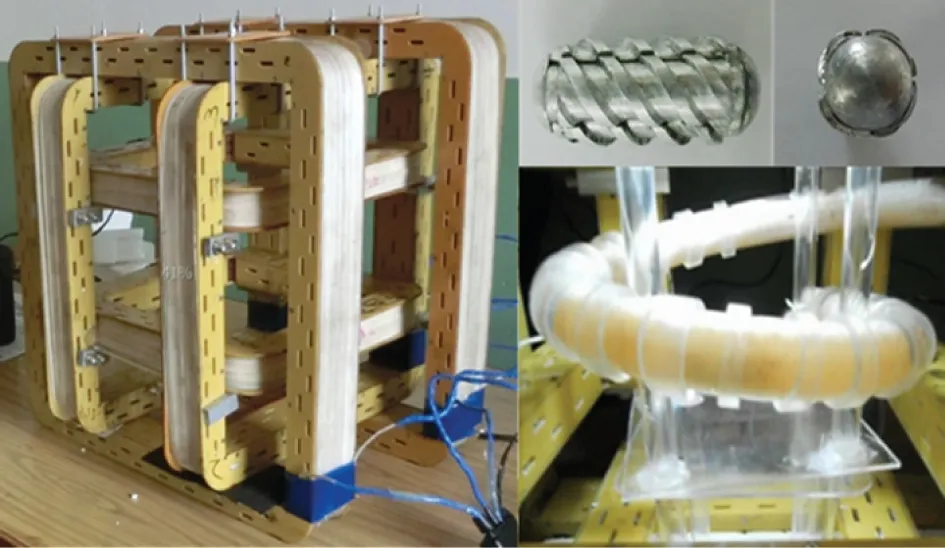
图7 扭转力矩效应花瓣型胶囊系统
Ha Le等[24]研制一款能够释放药物微型液压泵胶囊,由亥姆霍兹线圈和麦克斯韦线圈组成电磁驱动系统。当需要驱动行走时,安装的2个软磁环被系统磁场沿轴线磁化,相互吸合,连同液压泵螺旋桨一同旋转,驱动胶囊行走;当需要释放药物时,软磁环被消磁而相互远离,脱开液压泵螺旋桨,液压泵螺旋桨在电磁驱动系统的作用下继续旋转并转动储药仓释放药物。
天津理工大学Nan Liang等[25]研制出一种对称螺旋胶囊,如图8所示,该胶囊长70 mm,直径12 mm,内部嵌有永磁体,通过外部磁场对内部永磁体作用耦合力矩而驱动机器人,Nan Liang分析了不同液体流速下机器人的游动性能,以及胶囊在液体中的浮力和阻力特性。当液体流速为26 mL/min时,机器人动态游动性能最佳。水平方向游动时,机器人顺流游动最大速度为20.44 mm/s,逆流游动最大速度为6.49 mm/s;垂直向上游动时,机器人顺流和逆流游动最大速度分别为10.1 mm/s和1.34 mm/s;垂直向下游动时,机器人顺流和逆流游动最大速度分别为10.11 mm/s和1.337 mm/s。
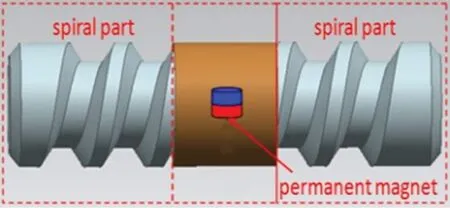
图8 对称螺旋胶囊
意大利圣安娜高等研究学院Fontana等[26-27]提出一种球形胶囊,该机器人直径为26 mm,质量为12.7 g,内置图像与光纤传感器、控制单元、动系统、智能充电电池、智能通电电路和定位模块,该机器人通过电磁控制系统产生的磁吸引力作用于机器人外嵌永磁体,拉动机器人沿所需方向运动。当将机器人放置于充电座上时,可进行无线充电,机器人内部线圈与充电座上的线圈通过电磁感应原理为机器人内置电池充电,充电时间约为26 min。
为精确定位机器人的角度和位置,保证传出图像质量,Son等[28-29]设计了一种5D定位方法,即通过单轴霍尔传感器阵列测量给定位置的垂直磁场强度,定位方法分成两步:首先,从测量的磁场数据中减去电磁铁产生的磁场,目的是为了获得机器人磁场的精确值;然后,对减去的磁场二次微分,以减小电磁场在定位过程中产生的影响。该定位方法的位置误差能达到(2.1±0.8)mm,角度误差为6.7°±4.3°。方柱形胶囊的尺寸为6.4 mm×6.4 mm×12.8 mm,材质为Nd-Fe-B永磁体,磁矩为0.45 A·m2,采用滚动行走方式。
2.3 气压驱动型
Poon等[30]提出一种仿毛虫机器人,如图9所示。机器人全长100 mm,为提高机器人的移动效率和安全性,对气囊充气过程中的压力、体积和与肠内壁的接触力均进行了研究,分别在硬质PVC管道、软质PVC管道、多肌肉猪肠和少肌肉猪肠中进行了实验,结果表明在少肌肉肠道内机器人行走时间最长,在硬质管道中行走时间最短,45 mmHg为肠道内最小锚固压力,双气囊内的最佳压力分别为5.4 kPa和5.6 kPa。与之类似,日本中央大学Adachi等[31]也开发了一种肠道仿蚯微型机器人。
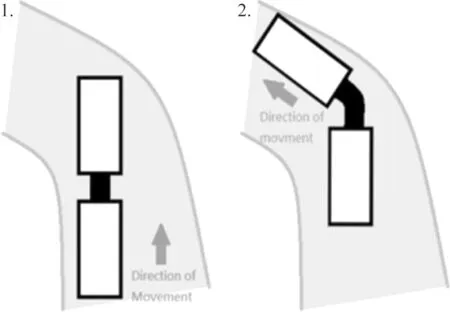
图9 肠道仿毛虫微型机器人转向控制
3 结束语
本文对国内外主被动式肠道微型机器人的特点和研究进展进行了综述。被动胶囊利用消化道自身蠕动力进行全消化道的遍历诊察,运动缓慢而无序,无法实现姿态主动控制,遇到肠道褶皱堆积还会发生长时间滞留人体的危险。主动胶囊能够实现机器人方向和姿态的主动调整,缩短消化道遍历时间,提高诊疗效率,改善诊疗安全性。主动控制对扩展胶囊功能十分重要,如检测胃肠道pH值生理参数,消化道内释放药物、光动力诊察、甚至微手术等。因此,主动控制成为当前研究热点,磁驱动型胶囊以其供能稳定、控制方便、磁场均匀以及方位指向性好等特点,成为主动胶囊的主流方向,该方式可不受机器人内部体积约束,能高度微型化,降低检查过程中的不适感与异物感,便于临床推广应用。目前,许多研究机构已纷纷转向无线磁控胶囊的研究,并认为是最有可能应用的技术途径。随着科技发展,人工智能在医学中逐步应用,尤其在胶囊诊治中,人工智能辅助系统可全面提升检察效率与诊治质量,因此,人工智能、机器学习与胶囊的融合将是未来消化道疾病诊疗发展的趋势,实现胶囊的智能化发展。
