高分多模卫星高分相机优化设计
2021-07-02赵占平黄巧林赵野姜伟蔺宇辉
赵占平 黄巧林 赵野 姜伟 蔺宇辉
(北京空间机电研究所 先进光学遥感技术北京市重点实验室,北京 100094)
随着遥感技术的发展和卫星用户需求的不断提高,航天光学遥感器开始倾向于采用敏捷卫星平台和多模式成像,以实现灵活机动随时获取图像。敏捷卫星能够在短时间内实现大角度快速机动,利用其快速姿态机动能力,迅速改变星载相机光轴对地指向,实现对地面目标的高效、灵活的观测;但敏捷卫星在轨运行期间,星上动量轮或控制力矩陀螺(CMG)转动、驱动机构运动、低温制冷机以及太阳翼等工作时都会产生微振动,形成一种幅值较低的颤振响应,这种颤振响应作用于高分辨率相机上,会引起相机整体发生刚性偏移从而导致相机光轴发生偏转抖动,也会引起相机光学件偏离安装位置或光学元件自身变形导致相机光轴发生偏转,影响相机成像质量[1-6]。因此,卫星的微振动对相机成像质量的影响不可忽略,需要采取有效的隔震、减震措施,文献[1]建模分析了不同频率谐波激励下相机光轴偏角导致相机调制传递函数(MTF)下降的影响,得出需要重点隔离振动信号中的50 Hz和100 Hz的谐波成分才能达到良好的隔振效果。卫星敏捷成像时姿态实时变化,观测斜距、像面扫描速度的连续变化导致积分时间在成像过程中实时变化。当卫星观测机动角度较大时,焦面中心视场和边缘视场积分时间之间的差异也较大,这些因素都会导致图像质量下降[7-11],为保证敏捷卫星在各种复杂姿态机动下相机的成像质量,需要根据预期的卫星姿态实时调整相机的积分时间[12],文献[13]提出可采取基于时间同步的积分时间实时调整方法。为消除微振动对相机成像质量的影响,适应敏捷卫星的多模式成像,保证时间延迟积分电荷耦合器件(TDICCD)高分相机成像质量,本文提出通过相机与星敏感器一体化设计和柔性适配装置设计技术,以及积分时间同速/异速设置及插值/不插值设置策略,从而实现在微振动传播路径上减少或消除微振动对相机的影响,并提高了积分时间设置精度。
1 敏捷遥感卫星的成像模式
敏捷遥感卫星的成像模式主要包括被动式推扫成像和主动式推扫成像两大类[14-15],详见表1。

表1 敏捷遥感卫星主要成像模式Table 1 Main imaging modes of agile satellites
被动式推扫成像时星体滚动角、俯仰角相对轨道系保持固定,偏航角根据需求实时调整,使投影到相机焦面的地速方向与法线平行,被动式推扫成像获得的条带方向与星下点轨迹平行,卫星在姿态机动过程中相机不开机成像,卫星姿态稳定后相机开机成像,被动成像模式示意见图1所示。
主动式推扫成像时卫星在姿态机动过程中相机一直开机成像,卫星姿态在成像过程中实时变化,观测斜距、像面扫描速度实时变化。主动式推扫成像根据摄影点在地面的运动形式的差异,可分为主动同轨多条带拼幅成像模式、主动同轨多角度成像模式、沿迹主动推扫成像模式和非沿迹主动推扫成像模式,成像原理示意见图2所示。

注:MS为卫星开始执行本段任务时对应的星下点,ME为卫星结束执行本段任务时对应的星下点。图1 被动成像模式示意图Fig.1 Passive imaging mode diagram

图2 主动成像模式示意图Fig.2 Active imaging mode diagram
2 高分相机的优化设计
2.1 相机与星敏感器一体化设计
在高精度对地遥感卫星敏捷成像模式下,对卫星姿态指向精度有严格的要求。星敏感器是卫星姿态测量的主要部件,在敏捷卫星高分辨率相机成像过程中,星敏感器支架的热变形对图像定位与配准有较大影响[16-18]。在敏捷成像模式下,为了提高卫星定姿精度及相机光轴指向精度,采用相机与星敏感器一体化设计;多台星敏感器组合工作,按照特定的角度通过星敏感器支架直接安装在相机的主承力框上。相机的主承力框是相机、卫星平台及星敏感器一体化设计的集中体现,主承力框既是相机的主要支撑零件,也是相机与卫星平台载荷适配结构的机械接口;主承力框采用钛合金整体铸造成型,直接铸造出星敏感器支架的接口,它具有较高的强度、刚度及高的温度稳定性,主承力框结构示意如图3所示。

图3 主承力框结构示意图Fig.3 Schematic diagram of main bearing frame structure
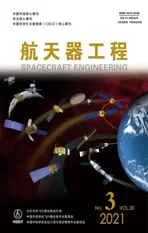
为保证星敏感器在相机主承力框上的安装精度及与相机光轴的几何定位,在相机主承力框上安装精测镜(精测镜的定位点在镜子中心十字刻线)作为光轴引出基准。星敏感器支架安装接口及精测镜位置如图4所示。此方案下,在温度稳定性优于±0.1 ℃的相机主承力框上安装星敏感器,既保证了星敏感器支架与相机的连接刚度,也减小了星敏感器支架受周边温度波动的影响;星敏感器支架自身的控制精度保证星敏感器支架受在轨温度变化引起的热变形可能性降低,星敏感器支架安装面指向变化优于0.3″、相机光轴指向变化优于0.3″,达到提高星敏感器指向精度的目的。
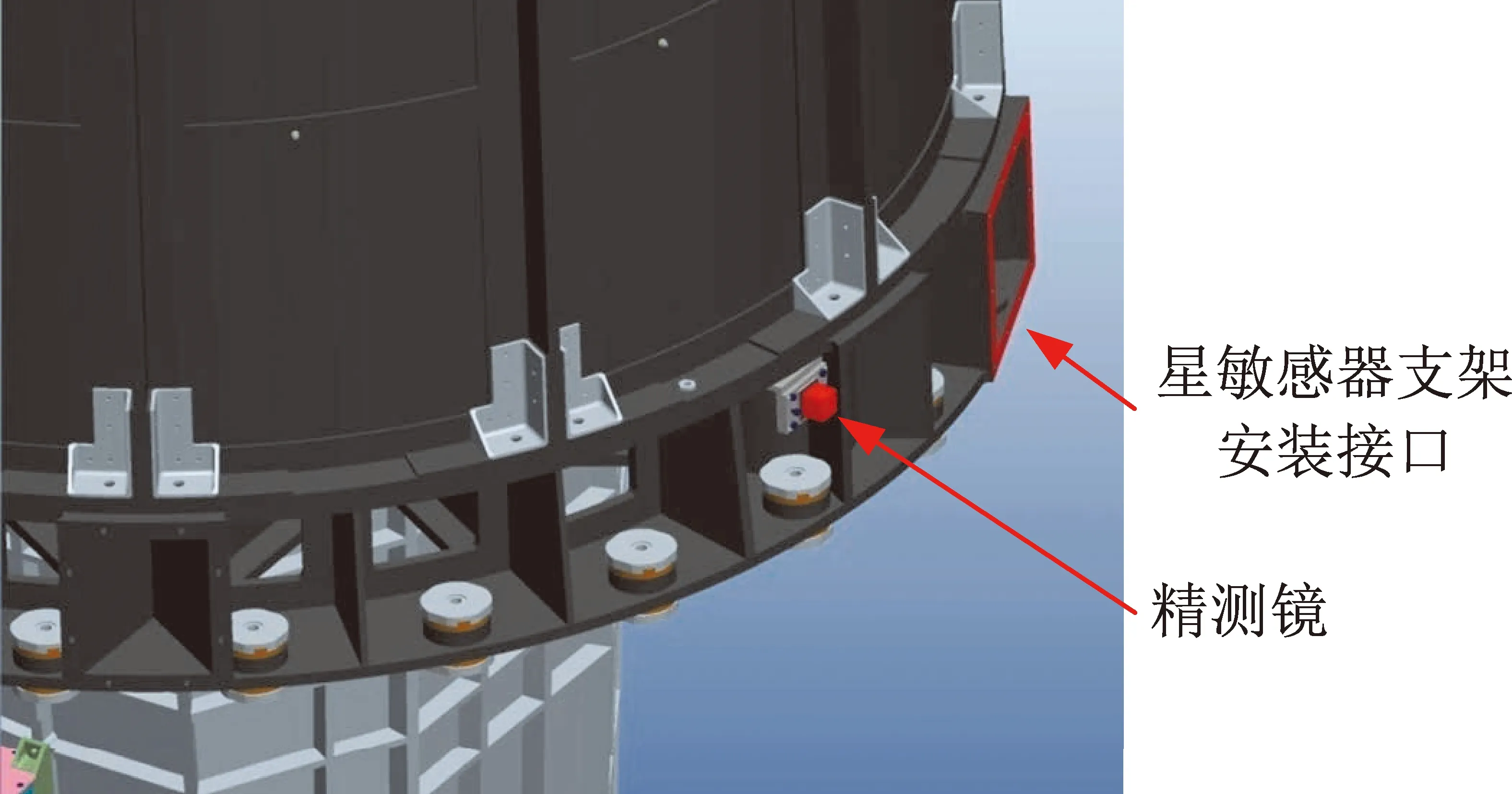
图4 星敏感器支架及精测镜安装位置示意图Fig.4 Position diagram of the star-sensitive bracket and the precision mirror
2.2 相机柔性适配装置设计
在相机与卫星平台载荷适配结构之间安装柔性适配装置,抑制卫星本体振动对相机的影响,同时起到释放热变形的作用。相机柔性适配装置由解锁组件、柔性组件、支撑环框组成,如图5所示,其中柔性组件是承担释放卫星平台载荷适配结构热变形及对卫星平台的太阳翼驱动机构、天线驱动机构、控制力矩陀螺等扰动源进行微振动抑制的主要元件。
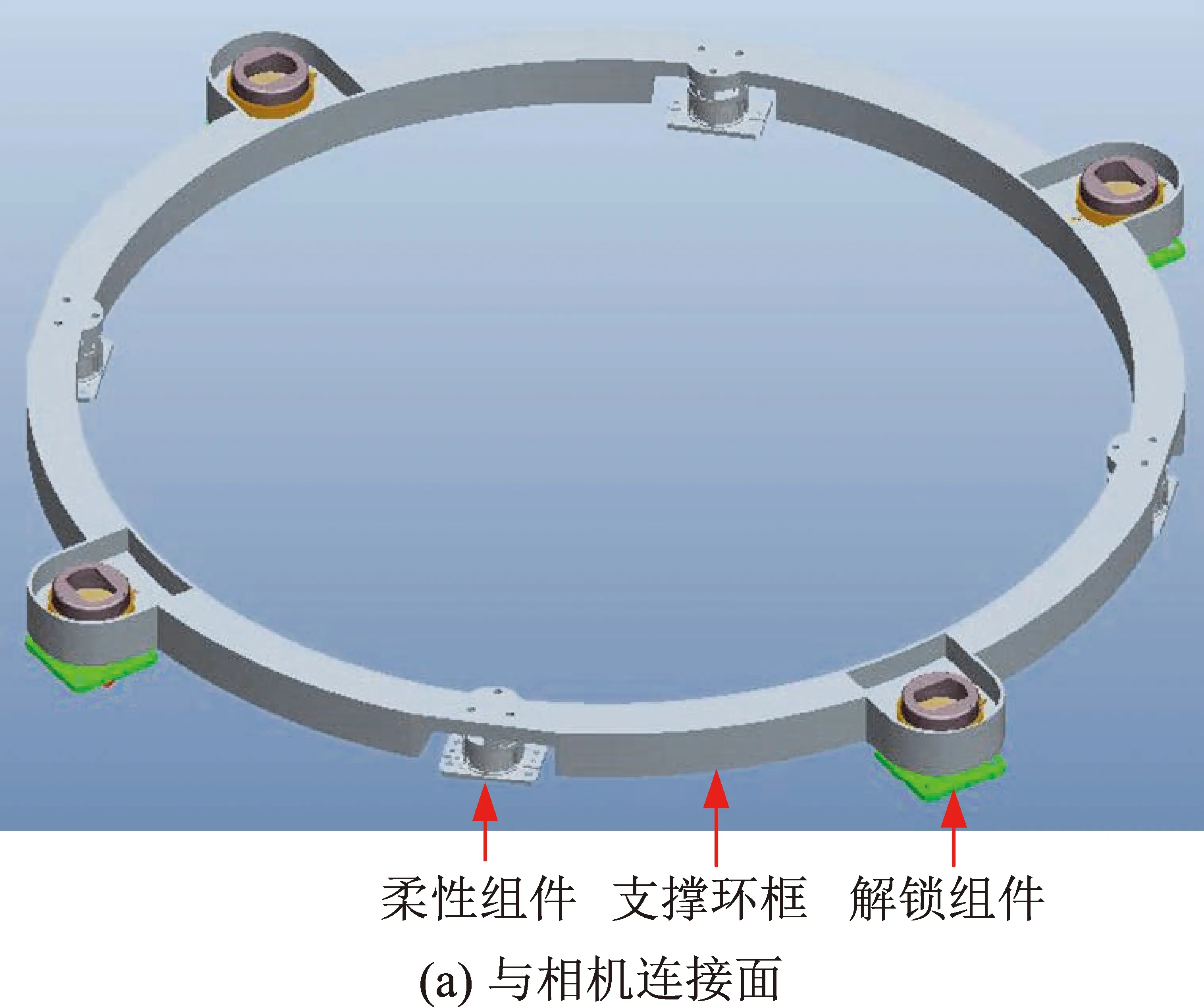
图5 相机柔性适配装置示意图Fig.5 Diagram of camera flexible adapter device
解锁组件底面与卫星载荷适配结构连接,选用火工分离装置,发射主动段锁紧,入轨后解锁释放,并形成分离面间隙。解锁组件与相机之间通过支撑环框连接。
柔性组件的功能是降低星上微振动到相机的传递,并降低卫星平台热变形对相机的影响。柔性组件主要由隔振弹簧和特定频率阻尼增强的磁阻尼器组成,弹簧参数由柔性组件的隔振频率决定,阻尼器主要由导体、永磁体及支撑结构构成,导体与相机连接,永磁体与星上结构固定;当相机与星体结构发生相对运动时,导体在永磁体产生的磁场中运动,导体内形成电涡流产生阻尼力,实现振动能量到电能量的转换,最终将振动能量消耗。柔性组件示意如图6所示。
图6 柔性组件示意图Fig.6 Flexible component diagram
解锁组件和柔性组件与相机之间通过支撑环框结构连接。柔性组件安装在支撑环框的凹槽内,上端面与柔性环框连接,下端面与卫星平台的设备舱连接,入轨解锁后,相机通过橡胶垫连接至支撑环框,支撑环框再通过柔性组件连接至卫星平台的设备舱。
1)热变形释放效果
柔性适配装置能够将平台结构的在轨热变形全部或大部分释放,当柔性组件与支撑环框安装面的面内、面外变形均为100 μm~500 μm时,可实现变形释放率优于80%,确保高分辨率相机安装界面的高稳定性。
2)减振效果
多颗卫星的微振动试验测试结果表明:扰振载荷作用下,卫星结构振动加速度在0.001gn量级,为最大限度地降低扰振力(66 Hz、158 Hz)的传递,柔性组件隔振频率尽可能低,在50~500 Hz范围内,由传递曲线可知,传递率均小于0.2,全频段内平均插入损失优于80%,在66 Hz、158 Hz处的插入损失均优于90%(见图7)。

注:RX、RY、RZ为绕X、Y、Z方向旋转量,TX、TY、TZ为X、Y、Z方向平移量。图 7 柔性组件下界面至相机质心传递率Fig.7 Interface from the flexible assembly to the center of the camera centroid transfer rate
因此,相机通过柔性适配装置与卫星平台的载荷适配结构连接,可有效隔离卫星平台在轨工作时热变形大及微振动对相机主镜面型及图像质量的影响。
2.3 积分时间优化设置策略
敏捷成像模式下,积分时间设置不仅与成像模式有关,还与成像时刻关系密切。积分时间设置频率与初始成像时刻的积分时间大小和成像时段的积分时间变化率均有关;在积分时间允许像移量固定不变时,积分时间设置频率取决于成像时刻的级数及积分时间变化率等参数组合[19];因此,在卫星主动成像模式下进行积分时间插值设置时,需要卫星根据成像模式的任务状态,预估出相机拟采用的积分级数,并依据轨道参数实时计算出初始成像时刻的积分时间和成像时段的积分时间变化率。
为保证积分时间设置精度,每个积分时间码必须带时标。利用GPS高精度时间同步进行在轨积分时间发送,该方法能够满足精确时间要求的最优积分时间,有效提高积分时间实时调整精准度。
带时标的积分时间码的具体计算方法如图8所示,根据敏捷卫星的任务规划确定出成像时段,再根据成像时段分别由导航系统和控制系统计算出对应成像时段下的带时标的轨道参数和姿态参数,将这两个带时标的参数同时送入积分时间计算单元,由积分时间计算单元预先计算得到成像时刻的带时标的积分时间码,在成像时刻发送给相机分系统。

图8 带时标的积分时间码计算方法Fig.8 Calculation method of time code with timescale integral
此方法需要整星计算并缓存的积分时间码比较多,需要将几十个甚至上百个带时标的积分时间码准确的发送给相机,数据缓存及处理任务比较大。为缓解整星数据处理量及缓存量,采取由整星的积分时间计算单元计算出成像时段的分段积分时间,按照4 Hz的频率提前2~5 s发送给相机分系统,相机分系统的管理单元接收整星指令后,以250 ms为间隔,计算相邻两次积分时间差值Δ,并将积分时间、差值和发送时刻发送给成像系统的积分时间控制电路;成像系统的积分时间控制电路接收积分时间、差值和发送时刻,对积分时间做差值运算,在相应的发送时刻,以整星要求的插值频率向焦面电路发送积分时间。
敏捷成像模式下积分时间设置方法如图9所示。被动成像模式下,积分时间变化缓慢,积分时间可按定值进行设置;主动推扫成像过程中,积分时间变化比较快,星务根据卫星各参数计算出成像时段积分时间设置频率及带时标的积分时间码,发送给相机分系统,由相机采用基于时间同步的积分时间进行实时插值。
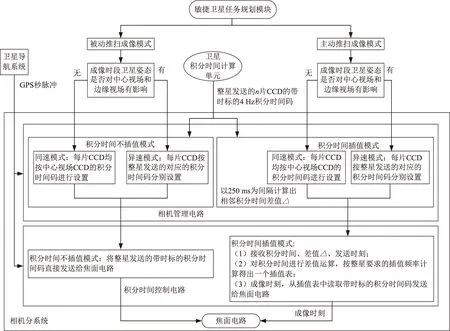
图9 积分时间设置方法Fig.9 Integration time settings methods
3 在轨验证
高分多模卫星的高分辨率相机上采用了上述3项优化设计,2020年7月,高分多模卫星发射入轨。在近10个月的在轨运行过程中,相机在轨工作正常、性能稳定,随卫星完成了点目标成像、多条带拼幅成像、多角度成像、沿迹及非沿迹成像,且各种成像模式下获得的图像非常清晰、细节丰富,图像的地面像元分辨率优于0.5 m,是目前国内最高分辨率的民用相机,图像质量得到了用户的一致好评,达到了国际同类产品水平,在未来的8年内将会在应用上发挥重要作用。
点目标成像模式下的在轨图像如图10所示,图像清晰、细节丰富、色彩真实,拼幅成像模式下的在轨图像如图11所示,5个条带拼接后,增加幅宽的同时保持了地物的连续性,且多条带间辐射和几何性能一致。

图10 点目标成像模式Fig.10 Point target imaging mode

图11 拼幅成像模式Fig.11 Multi-band mosaic imaging mode
4 结束语
针对敏捷遥感卫星在灵活机动过程中产生的微振动和姿态的实时变化,为保证高分辨率相机的成像质量,本文提出了3项优化设计:通过在相机与卫星的安装接口上增加柔性适配装置的方法,在传播路径上阻断或降低了微振动的传播量级;通过将星敏感器安装在相机主承力框上的方法,提高了卫星的姿态定位精度及相机光轴指向精度;通过积分时间优化设置策略,提高了主动成像模式下积分时间设置精度与成像推扫速度的匹配性。高分多模综合卫星的高分相机采用了这3项优化设计,经过在轨多模式成像验证,各成像模式下图像质量清晰、细节丰富,得到了用户的一致认可。本文的优化设计方法和设计思路可为后续相机的优化设计提供参考。