Y波导波形斜度误差对光纤陀螺小角速率性能的影响
2021-07-02范梓涵于海成石海洋
范梓涵, 于海成, 石海洋
(1.北京航天时代光电科技有限公司,北京100094;2.北京航天控制仪器研究所,北京100039)
0 引言
作为基于Sagnac效应的一种全固态惯性角速率传 感 器[1-2], 光 纤 陀 螺 (Fiber Optic Gyroscope,FOG)以其特有的可靠性高、动态范围广等优点成为航空、航天、航海、兵器、能源等领域的主流惯性器件。中高精度的光纤陀螺普遍采用全数字闭环检测方案,这提高了光纤陀螺在整个测试范围内的灵敏度、稳定性、动态范围和标度因数线性度。Y波导作为闭环光纤陀螺的关键器件,实际应用中Y波导存在高阶非线性的电光效应,产生的波形斜度误差附加在调制波形上,解调出的附加相位误差作用在闭环光纤陀螺反馈回路上。而且当大角速率时,该附加相位远小于旋转引起的Sagnac相位差,对光纤陀螺不会造成影响。因此,波形斜度误差会导致光纤陀螺在小角速率下产生死区[3]和标度因数误差。
目前,光纤陀螺小角速率下误差的研究主要是针对Y波导相位调制器信号与探测器输出信号之间存在电子串扰误差的抑制[4]以及复位相位误差的抑制[5-7]。 文献[8]、 文献[9]针对Y波导相位调制器信号与探测器输出信号之间存在电子串扰误差提出了随机调制和前放电路时域去尖的抑制措施;文献[10]从电路板出发,通过对电子元器件和布局布线的优化来降低串扰的影响;文献[11]~文献[13]则采用施加外部激励优化算法等方式对2π复位相位误差进行抑制;文献[14]说明了反馈回路非线性误差会导致光纤陀螺出现死区和标度因数误差,并通过调制信号和后续信号处理消除了反馈回路线性误差的影响;文献[15]分析了Y波导产生波形斜度的机理以及对光纤陀螺的影响机理,提出了三种抑制Y波导波形斜度的方法以减小死区,但未提及波形斜度中存在的波形斜度误差,而该误差是导致解调后产生附加相位差的主要原因,最终影响到光纤陀螺小角速率下的性能。
本文主要针对Y波导器件非线性产生波形斜度误差机理以及波形斜度误差对光纤陀螺死区及小角速率下标度因数性能的影响进行深入研究。LiNbO3晶体存在会引起闭环光纤陀螺相位调制误差的高阶非线性电光效应,这在以前的研究中常被忽略。因此,通过抑制LiNbO3晶体的高阶非线性电光效应,即Y波导电极间产生的非线性电场误差,减小了作用在调制波形上的波形斜度误差,有效提升了光纤陀螺小角速率下的性能,对光纤陀螺的工程应用具有重要意义。
1 波形斜度误差的产生以及影响机理
1.1 波形斜度误差产生机理
Y波导利用LiNbO3晶体的电光效应实现高带宽的相位调制,通过施加调制信号,可实现闭环光纤陀螺所需的偏置相位调制和反馈相位调制。光波经过相位调制后的相位变化可表示为

式(1)中,Δβ为电压引起的波导传播常数变化量,ne为LiNbO3晶体的折射率,γ33为泡克尔电光系数,λ为真空中的波长,L为调制器的电极长度,Γ为电场和光场的重叠积分因子,V为外加偏置电压,G为平面电极的间距,Δne为LiNbO3晶体在外加电场作用下引起的折射率变化。Δne可表示为

式(2)中,E为调制电场强度,κ为克尔电光系数。式(2)中的第一项为一阶项,第二项为二次高阶项,也就是非线性误差项。一般情况下,由于二阶及二阶以上的高次项比较小,分析时常忽略其对晶体折射率变化的影响。但在实际应用中,LiNbO3晶体的电光效应存在高阶非线性电光效应,会引起闭环光纤陀螺相位调制误差。在Y波导的LiNbO3芯片表面会存在可移动的杂质电荷(通常为Na+、Li+等碱金属离子),当给电极施加偏置电压时,电极间的移动电荷将在电场作用下定向漂移,聚集在调制电极两极上产生附加电场Ee。质子交换Y波导电极的结构图如图1所示,绿色实线和蓝色实线分别表示Ez和Ee的方向,蓝色虚线和红色虚线分别表示正、负可移动杂质电荷的运动方向。给电极施加电压V=+Vπ/2, 杂质电荷产生的附加电场Ee与外加电场Ez反向,如图1(a)所示。外加电场反向,即V=-Vπ/2, 杂质电荷产生的附加电场Ee与外加电场Ez同向,如图1(b)所示。


图1 施加偏置电压时的Y波导电场分布Fig.1 Electric field distribution of Y-waveguide under bias voltage
高阶项导致折射率的变化为


由式(3)和式(4)可知, 当附加电场Ee不可忽略时,LiNbO3晶体折射率发生变化,该变化会产生波形斜度作用到反馈回路中。对闭环光纤陀螺施加方波调制,达到探测器的光强I为

式(5)中,ICW、ICCW分别为顺时针和逆时针传播的光波光强,Vπ为半波电压。Vπ可表示为

当调制方波的幅值为Vπ/4、周期为2τ时,V=±Vπ/2,理想情况下探测器的输出应当为一条直线。但是,附加电场Ee使得V是随时间变化的,其变化过程与杂质电荷在电场下的漂移运动有关,叠加波形斜度误差的方波调制示意图如图2所示。

图2 叠加波形斜度误差的方波调制示意图Fig.2 Square wave modulation diagram of superimposed waveform slope error
当在t=0时刻时,探测器输出对应为A点处的光强。随着时间的推移,杂质电荷在电场作用下漂移,产生一个与外加电场方向相反的电场Ee,从而与一部分外加电场相抵消,使得V<Vπ/2,此时输出对应为B点附近的光强。当t=τ时,外加电场反向,此时杂质电荷产生的电场方向与外加电场方向相同,两者相互叠加使得V<-Vπ/2,此时输出对应为C点附近的光强。同样在反向外加电场作用下,杂质电荷又向相反的方向漂移使得其与外加电场由相互叠加逐渐变化为相互抵消,此时逐渐减小,对应的输出由C点附近逐渐变化到D点和E点附近的光强。当t=2τ时,外加电场再次反向,此时杂质电荷产生的电场方向又与外加电场方向相同,两者相互叠加使得V>Vπ/2,此时输出对应为F点附近的光强。然后,杂质电荷又向相反的方向漂移使得其与外加电场由相互叠加逐渐变化为相互抵消,此时V逐渐减小,对应的输出由F点附近逐渐变化到A点和B点附近的光强。如此反复,就导致了波形倾斜现象的出现,即产生波形斜度。波形斜度会进一步产生干扰信号作用在光纤陀螺闭环回路中,波形斜度误差引起的干扰信号波形如图3所示[5]。为便于观察,选用一只波形斜度大于一般值的Y波导,测得的典型波形斜度波形如图4所示。

图3 波形斜度误差引起的干扰信号波形Fig.3 Diagram of interference signal waveform caused by waveform slope error
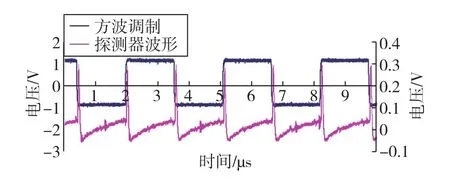
图4 示波器实际测得含有波形斜度的探测器波形Fig.4 Diagram of detector waveform with waveform slope measured by the oscilloscope
但是,如果每个τ内由附加电场Ee产生的波形斜度ΔV(t)相同,解调后不会产生附加相位差。实际上每一个渡越时间内由Ee产生的ΔV(t)不尽相同,即存在波形斜度误差ΔVε(t), 解调后产生附加相位差,导致光纤陀螺出现误差。
1.2 波形斜度误差对光纤陀螺的影响



由式(15)可得到光纤陀螺标度因数误差与波形斜度误差引起的相位差ΔφY的函数关系。由于Y波导调制电极间的杂质离子改变加载在波导上的电场特性,附加电场作用到调制波形上产生波形斜度,波形斜度存在误差,导致闭环光纤陀螺相位调制产生附加相位差ΔφY, 该附加相位将作用到光纤陀螺反馈回路调制相位上,影响光纤陀螺信号的解调,最终导致光纤陀螺产生死区以及标度因数误差。采用L=500m、D=47mm的光纤陀螺对上述波形斜度误差标度因数相对误差关系进行仿真,仿真结果如图5所示。可以看出,标度因数相对误差与波形斜度误差成正比关系。

图5 波形斜度误差与标度因数相对误差关系曲线Fig.5 Relationship curve of waveform slope error and scale factor relative error
2 改进与实验
在Y波导芯片小型化进程中,由于芯片长度有限,调制电极处于磨抛陪片下方,由于陪片粘胶的影响,有部分杂质残留在电极上,杂质电荷会在外加电场Ez的作用下产生附加电场Ee,导致Y波导产生波形斜度。因此,本文改进了Y波导芯片的磨抛陪片,使磨抛陪片不压到调制电极上,以减小Y波导波形斜度及其误差。为验证改进的Y波导波形斜度对光纤陀螺死区以及小角速率标度因数性能的影响,实验选用一只波形斜度为0.532%的Y波导,对Y波导进行工艺改进,改进后的Y波导波形斜度减小到0.215%,分别对改进前后的光纤陀螺死区以及小角速率标度因数进行测试验证。
2.1 死区实验验证
闭环光纤陀螺系统与地球南北轴垂直时,闭环光纤陀螺系统的输入角速率为零。在使闭环光纤陀螺系统的输出值为零的输入角速度点附近的一段区间内,闭环光纤陀螺无法敏感的角速度区间即为死区。为验证改进前后Y波导的光纤陀螺输入-输出关系, 根据国军标 GJB 2426A-2004[17],将光纤陀螺安装在转台上,转台以0.005(°)/s的速率旋转。根据速率法光纤陀螺死区计算公式,可得到

式(16)中,DV为测量得到的光纤陀螺死区,ωEr为地球转速,θL为测试当地纬度,ω为转台转速,t为符合死区定义区域的对应时间(其中,改进前t前=3510s, 改进后t后=1160s)。 经过计算, 改进前的死区范围约为0.3(°)/h,改进后的死区范围优于0.1(°)/h。根据测试数据得到改进前后的Y波导波形斜度光纤陀螺输入-输出关系,如图6所示。
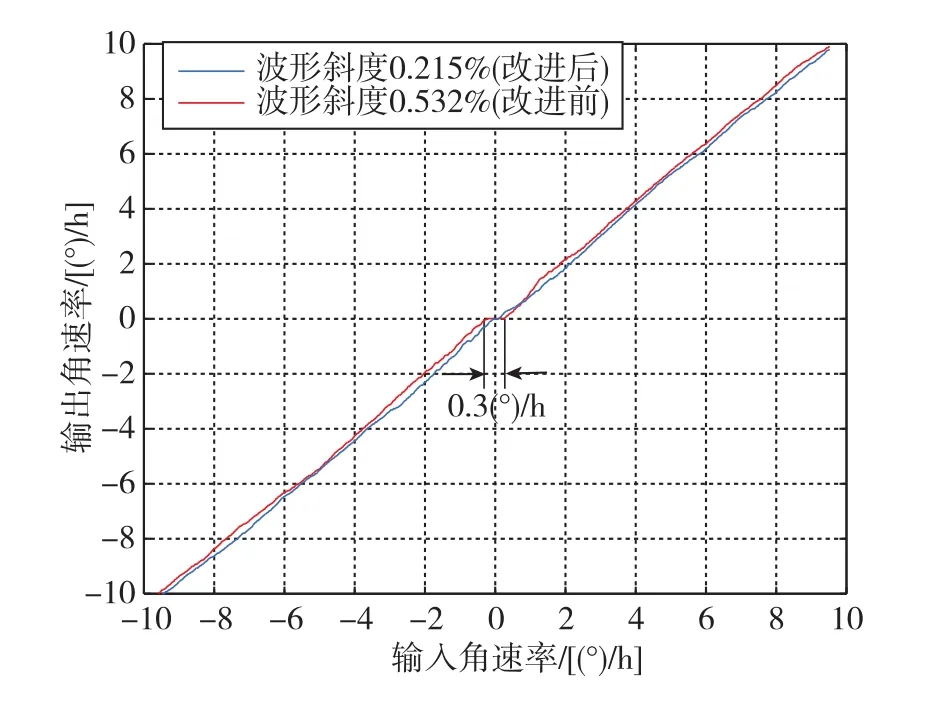
图6 改进前后的Y波导光纤陀螺输入-输出关系Fig.6 Input-output relationship of Y-waveguide FOG before and after improvement
2.2 标度因数实验验证
对改进前后的Y波导光纤陀螺分别在与东向夹角为 0°、 ±15°、 ±30°、 ±45°的位置进行地速标定[17],得到改进前后的标度因数曲线,并与这只光纤陀螺常温标定拟合的标度因数曲线进行比对,结果如图7所示,具体参数如表1所示。

图7 改进前后标度因数曲线与大角速率标度因数曲线对比Fig.7 Comparison of scale factor curve before and after improvement and large angular rate scale factor curve

表1 改进前后Y波导标度因数参数对比Table 1 Comparison of Y-waveguide scale factor parameters before and after improvement
由图7和表1可知,改进后的标度因数拟合曲线(蓝线)相对于改进前的标度因数拟合曲线(红线)更靠近大角速率的标度因数拟合曲线(绿线),改进前后小角速率标度因数与大角速率标度因数差异由 9.86×10-4减小到 6.30×10-5。 因此, 减小Y波导波形斜度可以有效消除部分小角速率下的标度因数误差,使光纤陀螺大小角速率标度因数一致性更好。
3 结论
本文主要分析了由于Y波导杂质电荷受外加电场的影响产生附加电场,引起Y波导的高阶非线性电光效应,改变了LiNbO3晶体的折射率,从而产生波形斜度误差影响闭环光纤陀螺小角速率下性能。通过对Y波导进行工艺改进,抑制了Y波导高阶非线性电光效应,使改进前后的波形斜度由0.532%减小到0.215%,从而减小波形斜度误差。实验验证结果表明,改进前后的Y波导使光纤陀螺小角速率下的死区范围由0.3(°)/h减小到了0.1(°)/h以下,小角速率与大角速率标度因数差异由 9.86×10-4减小到 6.30×10-5, 减小波形斜度误差明显改善了光纤陀螺小角速率下的性能。
