转位机构高温传递故障分析及改进优化
2021-07-02吕江涛刘建雄
邱 东,戴 庆,吕江涛,刘建雄
(1.湖北航天技术研究院总体设计所,武汉430040;2.湖北三江航天红峰控制有限公司,孝感432009)
0 引言
转位机构是用于惯性测量单元(Inertial Measurement Unit,IMU)旋转调制的构件,通过旋转调制可以使得地球重力加速度与自转角加速度等关键参数的测量在惯性器件内实现自标定。根据来自编码器和惯组的数据,转位机构可精确控制IMU进行旋转,从而实现自对准。为实现上述自标定、自对准等功能,转位机构需要能够携带负载旋转在 0°、 90°、 180°、 270°等位置精确定位,并在飞行、运输、贮存时实现可靠锁紧,同时在标定、对准时实现解锁功能。
为实现转位、定位、锁紧、解锁等功能,转位机构常采用多级运动副,由轴、轴承、齿盘、负载支撑平面等部分组成。有的转位机构采用蜗轮蜗杆传动,其优点是兼具传动和自锁功能。文献[1]介绍了一种单轴自标定转位机构结构构型,文献[2]介绍了旋转调制转位机构的控制工作机理,传动轴、齿盘、蜗轮蜗杆等传动件和整机骨架、负载支撑平面等结构件通常采用不同的材质,各级运动副及安装基体材料特性、加工公差、装配误差均是结构应力产生的主要因素,在温度显著变化的环境下,转位机构内部的热应力尤为明显,易因应力问题产生传递故障。文献[3]分析了铝合金材料残余应力情况,文献[4]~文献[7]提出了结构件热-应力耦合的有限元仿真方法,文献[8]通过仿真手段对温度变化情况下热应力的产生机理进行了分析。
基于转位机构相关热传递机理,构建了热力学模型,通过仿真分析结合验证实验发现在高温升环境下的机构部分运动副应力集中是导致高温解锁故障的原因。同时,上述仿真分析方法为快速定位转位机构热环境下的传递故障提供了有效手段。基于该结论,本文提出了转位机构应力控制与故障快速检测的方法,有效提高了转位机构在温度变化环境下的可靠性。
1 转位机构热传递机理分析
转位机构(下文简称:机构)的工作模式主要有:1)锁紧状态;2)解锁、锁紧过程状态;3)转位状态。
锁紧状态下的热量传递方式有:静态空气对流换热、机构的热辐射、机构内部的热传导。如果采用橡胶减振垫外减振方式,因为减振垫的隔热,机构和安装基面的热传导可以忽略;如果不采用外减振或者使用金属减振器,机构则存在与安装基面的热传导。
解锁、锁紧过程状态相较于锁紧状态热交换方式基本相同,区别在于增加了热源。增加的热源包括锁紧、解锁电机产生的热以及传动机构相互摩擦产生的热,此时的传动机构运动速度低,所提升的与周围空气的对流换热不明显。
转位状态相较锁紧状态增加了转位电机热源,转位机构运动时各部件摩擦产生的热量低于解锁、锁紧过程状态,传动机构带动负载旋转会明显提升与周围空气的对流换热。
在上述过程中,转位机构的负载(惯性设备等)如果通电工作,负载内部的传感器件是额外热源。
2 高温传递故障原因初步定位
以某惯性设备旋转调制用转位机构高温解锁故障为例进行分析,该转位机构传动构件的示意图如图1所示。

图1 某转位机构升降传动构件示意图Fig.1 Schematic diagram of a transposition mechanism transmission parts
该转位机构为单轴转位机构,整机与外部通过硅橡胶减振垫进行安装。升降电机是升降运动机构的驱动,升降齿轮、升降蜗轮蜗杆是转位机构的升降传动件,升降蜗轮安装于偏心轴一端,偏心轴另一端的偏心凸轮与主轴的凹槽配合控制主轴的升降,主轴与上齿盘固连,因此主轴的升降与上齿盘的升降保持一致。
升降位置的控制依靠升降反馈和光电开关来实现。转位机构解锁时,升降机构驱动上齿盘升起到指定位置,升降反馈遮挡升光电开关,开关触发,转位机构升起到位;转位机构锁紧时,升降机构驱动上齿盘下降到指定位置,升降反馈遮挡降光电开关,开关触发,进入减速敲击状态。在减速状态过程中,先控制升降电机在100ms内无电压输入,再在300ms时间内以50%最大转矩驱动电机旋转,此过程一共循环5次,而后降落锁紧结束。
根据实验大纲,该项目的转位机构需要经历两种不同技术状态的实验。两种技术状态的主要区别为温度循环实验要求不同,具体列表如表1所示。该转位机构在技术状态一条件下未出现温度循环实验中的解锁故障,在技术状态二条件下出现多起高温解锁故障现象,可见热环境是导致该转位机构高温解锁故障的原因。对该转位机构可能产生故障的原因进行梳理,如图2所示。
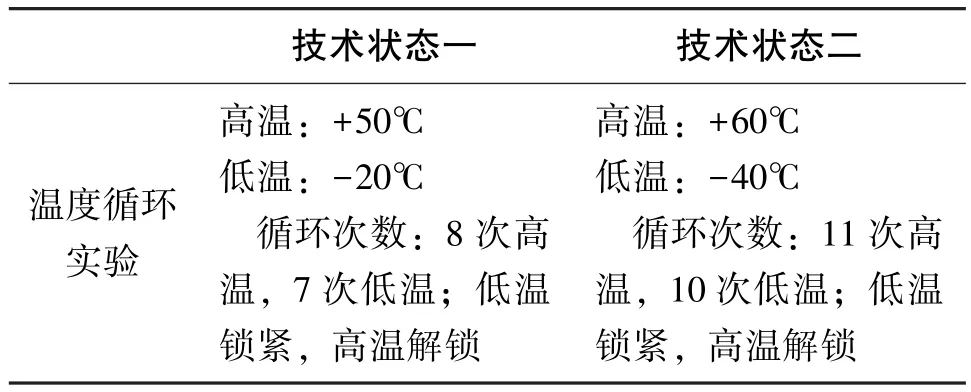
表1 转位机构两种技术状态主要区别Table 1 Main differences between the two technical states of the transposition mechanism

图2 故障树分析Fig.2 Diagram of fault tree analysis
3 热应力分析模型
3.1 转位机构热力学建模
为重点分析上述转位机构传动件的应力分布情况,选取关键部件构成仿真分析简化模型,如图3所示。将转位机构各部件材料主要物理参数[9]列表,如表2所示。
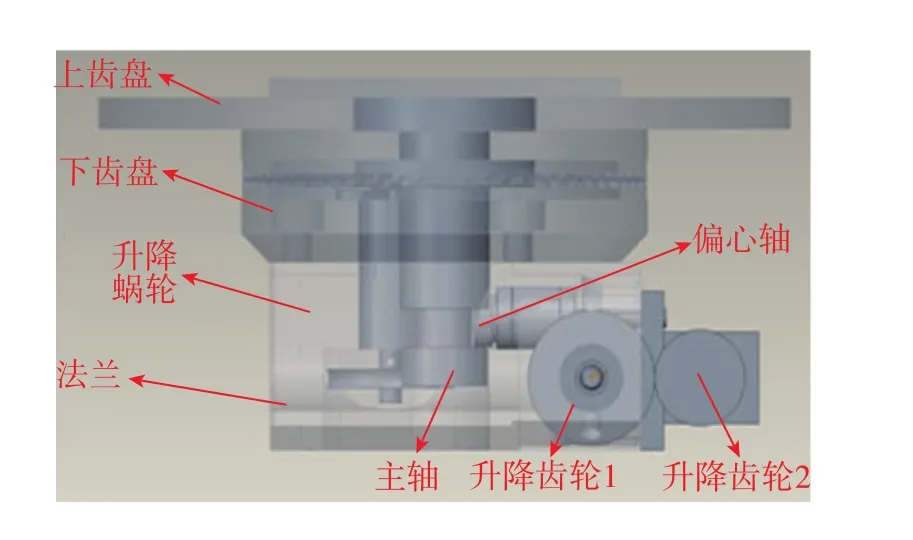
图3 转位机构仿真简化模型Fig.3 Simplified simulation model of transposition mechanism
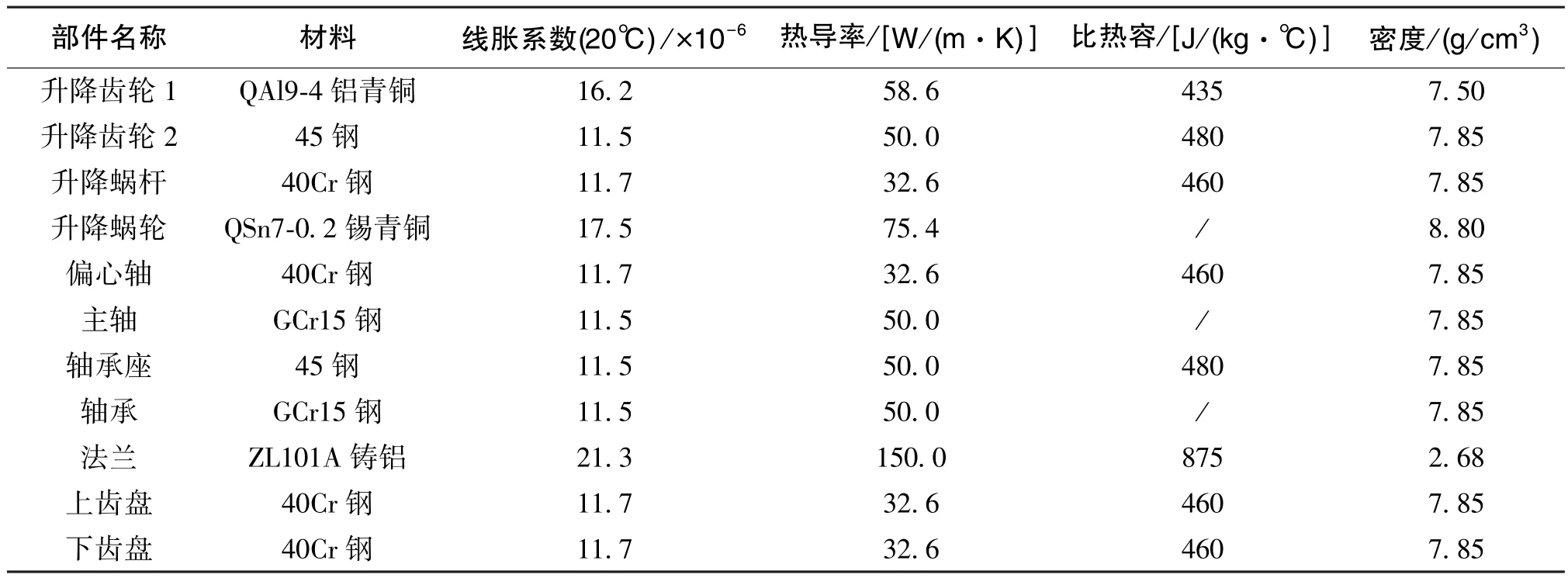
表2 转位机构各部件材料物理特性Table 2 Physical properties of materials for each part of transposition mechanism
该转位机构依靠蜗轮蜗杆结构进行自锁,在锁紧状态各运动副存在预紧力。
根据上文分析,转位机构解锁过程状态的热交换方式主要有:机构与周围空气的静态空气对流换热、机构的热辐射、机构内部器件的热传递。
基于转位机构高低温循环实验的实际情况(低温-40℃保温 2h,1h升温到+60℃,+60℃保温1.5h),使用有限元分析软件ANSYS对转位机构进行建模分析,设定如下加载条件:
1)整机对外安装接口使用的橡胶减振器为柔性约束,该处的应力远小于机构内部应力,将整机对外接口处设定为无固定约束;
2)仿真模型转位机构外表面的空气对流换热系数设为 8.3W/(m2·℃);
3)模型机构内部约束根据实际情况进行设置,为了逐个分析各运动副的应力情况,针对性加载运动副的约束。
3.2 转位机构解锁状态热应力分析
首先,设定各传动副内部没有相互约束,针对升降传动机构构建模型,仿真得到的位移云图如图4~图6所示。

图4 传动机构位移云图(放大200倍)Fig.4 Displacement nephogram of transmission mechanism(200 times magnification)
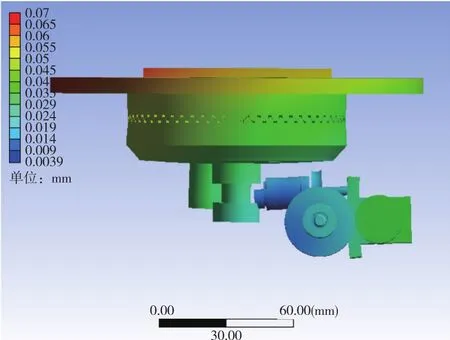
图5 传动机构位移云图(屏蔽法兰,放大200倍)Fig.5 Displacement nephogram of transmission mechanism(shielding flange,200 times magnification)
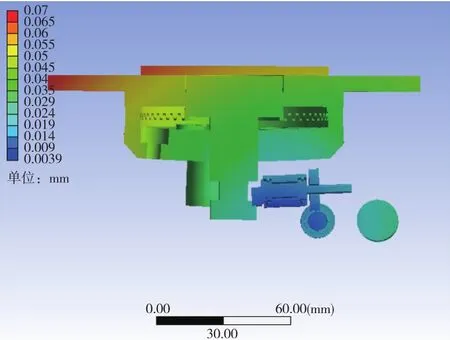
图6 传动机构位移云图(截面,放大200倍)Fig.6 Displacement nephogram of transmission mechanism(section,200 times magnification)
根据仿真结果,主轴/偏心轴、升降蜗轮/升降蜗杆、升降齿轮1/升降齿轮2的接触部位相对位置变化量如表3所示。

表3 传动副接触点相对位置变化量Table 3 Relative position change of transmission pair contact point
根据上述分析,主轴/偏心轴传动副、升降齿轮1/升降齿轮2传动副有干涉趋势,分别添加传动约束,仿真分析两处的压应力,其仿真云图如图7、图8所示。

图7 主轴/偏心轴传动副应力云图Fig.7 Stress nephogram of spindle/eccentric shaft driving pair

图8 升降齿轮1/升降齿轮2传动副应力云图Fig.8 Stress nephogram of lifting gear 1/lifting gear 2 driving pair
经过分析,主轴/偏心轴的接触应力达到171MPa,升降齿轮1/升降齿轮2的接触应力最大值为18.9MPa,可见主轴/偏心轴的接触应力更为集中。热应力导致传动副的接触压力,引发摩擦阻力,进而产生阻碍传动的阻力矩,这是产生机构传递故障的主要因素。
4 分析结果验证与机构优化改进
4.1 分析结果验证
为验证上述转位机构主轴/偏心轴传动副和升降齿轮1/升降齿轮2传动副的应力集中对于机构解锁功能的影响,在故障产品上进行验证实验。经过调整,对产品进行高低温循环实验,以检测高温解锁情况,验证实验的方法及结果如表4所示。
根据实验结果,主轴/偏心轴传动副和升降齿轮1/升降齿轮2传动副的应力集中均是可导致机构高温解锁故障的因素,主轴/偏心轴传动副的影响为主导因素。
4.2 机构优化改进
基于上述分析,从锁紧应力控制、解锁应力释放、应力状态快速判断三个方面进行优化改进,提出了三条对应的措施。
(1)锁紧应力控制
上文已述,转位机构锁紧时,升降机构驱动上齿盘下降到指定位置,升降反馈遮挡降光电开关,开关触发,进入一定时间内的数次减速敲击状态直至锁紧结束。光电开关与反馈板在装配时的相对位置关系决定了减速敲击时上下齿盘的位置关系,如果光电开关触发时上下齿盘距离过大,可能会导致锁紧结束时上下齿盘并没有啮合到位,影响到位精度;如果光电开关触发时上下齿盘已经啮合,则敲击过程电机输出力矩会大部分作用于传动件,导致传动件之间的应力过大。
调节升降反馈的位置,通过观察升降齿轮在敲击时是否转动角度,使得5次敲击至少有3次敲击加载在齿盘上,将该方法作为装配工艺规范要求能够有效控制锁紧到位时传动机构内部的应力。
(2)解锁应力释放
通过软件升级更改解锁时的控制流程,以实现锁紧故障时的应力释放。设定升降电机升起转动时的加载电压为正向电压,降落时的加载电压为反向电压,更改前后的措施如下:
原解锁故障时的控制流程为:控制电路给升降电机加载正向电压,使升降电机向升起方向旋转。若第一次加载后转位机构没有成功解锁,后续会再次加载正向电压,若第二次还是没有成功,则会进行第三次加载,若第三次依然没有成功,则系统报解锁故障。
升级后解锁故障时的控制流程为:控制电路给升降电机加载正向电压,使升降电机向升起方向旋转。若第一次加载后转位机构没有成功解锁,后续会加载反向电压,使电机向锁紧方向旋转。若此时没有实现成功解锁,后续进行第二次加载,过程为先加载反向电压,再加载正向电压,若第二次还是没有成功,则进行第三次加载,若第三次还是没有成功,则系统报解锁故障。
(3)应力状态快速判断
观察存在高温解锁故障的转位机构和正常的转位机构,发现常温下升降电机的启动电压存在区别。将数十件转位机构常温下的启动电压列表,如表5所示。

表5 转位机构升降电机在常温下的启动电压Table 5 Starting voltage of transposition mechanism lifting motor at room temperature
将正常转位机构与故障转位机构的启动电压汇总,如图9所示。

图9 转位机构启动电压汇总图示Fig.9 Summary diagram of transposition mechanism starting voltage
由图9可知,正常转位机构电机的启动电压在6V~9V范围内,故障转位机构电机的启动电压高于11V。根据此规律制订工艺规范,在转位机构锁紧、解锁部分装配完成后,测量升降电机的启动电压,如果超出6V~9V范围,则需要对锁紧、解锁部分进行重新装调。
通过以上三条措施进行机构优化改进,该转位机构高温解锁故障问题得到了有效解决。
5 结论
针对转位机构在温度升高情况下出现的传递故障问题,基于热力学原理对转位机构热应力的产生机理进行分析。结合某转位机构高温故障的例子,通过有限元分析软件ANSYS进行零件实体建模和热力学仿真,通过数组模型重建对转位机构运动副的应力应变状况进行逐条排查,实现对故障区域的定位。同时,仿真结果表明:温升状况下,因各部件的热膨胀在部分运动副产生的应力集中是导致转位机构传动故障的主要原因。
基于仿真结果对目标运动副进行调整,验证实验证实了缓解该运动副的应力集中能够有效避免传动故障。从锁紧应力控制、解锁应力释放、应力状态快速判断三方面提出了软件升级、装配工艺控制等措施,经过优化改进,转位机构温度升高情况下传递故障的问题得到了有效解决,所述的故障快速定位方法和改进优化措施为类似机构产品的设计与故障分析提供了借鉴。
