一种基于惯性辅助的卫星信息容错技术
2021-07-02陈善秋夏宇强
何 婕,陈善秋,夏宇强
(1.空军装备部驻北京地区第五军事代表室,北京101300;2.北京航天时代激光导航技术有限责任公司,北京100094)
0 引言
惯性导航系统(Inertial Navigation System,INS)可以输出全面的导航信息,频率高且完全自主,是武器系统必不可少的导航设备,但其存在误差随时间积累的缺点。而全球卫星导航系统(Global Navigation Satellite System,GNSS)可以利用载体被动接收来自导航卫星提供的伪距、载波观测值,能够为载体提供全天候、连续、实时的位置、速度导航信息,其优点是精度高且不随时间发散,缺点是容易受到干扰、依赖于连续稳定的卫星信号,且输出频率低(典型数据率为1Hz)、短期定位噪声大、导航信息不全面(无姿态航向等信息)。
虽然卫星导航无法单独使用来满足载机飞控系统对导航设备的要求,但其与惯性导航系统的特点形成鲜明互补,通过Kalman滤波的方式有效地将GNSS信息与INS信息融合起来形成的GNSS/INS组合导航系统可以发挥两种系统的互补特性,GNSS可以为惯性导航提供周期性的修正信息用来修正INS误差,从而保证INS长时间的高精度定位。在载体经历高动态GNSS信号缺失或GNSS信号载噪比较小时,INS可以继续自主进行高精度导航,在很大程度上弥补了卫星导航易受到干扰的缺点,所以GNSS/INS组合导航系统己经被广泛应用于军用、民用航空飞行器及其他领域[1]。
GNSS/INS组合导航系统采用Kalman滤波的方式来估计系统误差,能够进行误差估计的前提是卫星导航系统输出的载体速度、位置信息精度高。在实际使用中,卫星输出的速度信息会出现因载机处于高动态或者卫星信号被遮挡而发生跳变,若不处理,可能会出现滤波估计不稳定甚至估值错误的现象,严重影响GNSS/INS组合导航系统的导航精度[2-5]。为了提高滤波的精度和抑制发散,很多论文从不同角度考虑提出了很多抑制噪声和提高滤波精度的方法,比如Sage-Husa自适应Kalman滤波等,可以利用观测数据的信息在进行状态估计的同时进行在线噪声统计,从而达到降低模型误差、提高滤波精度的目的[6-10],但其在自适应系统噪声时常常具有不稳定性,在实际应用中常常会由于不能同时自适应系统噪声和量测噪声的变化而出现发散。
本文针对卫星信息不可避免出现的跳点问题,研究了一种基于惯性辅助的卫星信息容错技术,通过对量测数据中新息特性的分析,来衡量测量值是否发生跳变。若确定存在野值,不是简单的将此次观测值剔除,而是对本次速度相关新息置零。本次量测更新仅采用位置信息,既保证了新息(或量测向量)原有的统计特性,同时将野值带来的影响去除,能明显提升滤波器的估计稳定性及组合导航系统的精度。
1 GNSS/INS组合导航系统误差模型
1.1 坐标系定义
地心惯性坐标系(i系):地心惯性坐标系不随地球自转,其坐标原点为地心,Xi轴、Yi轴在地球赤道平面内,Xi轴指向春分点,Zi轴指向地球极轴,由右手定则决定Yi轴方向。
地球坐标系(e系):地球坐标系是固连在地球上的坐标系,随地球旋转,其原点为地球中心,Ze轴指向地球极轴,Xe轴通过零子午线,Ye轴指向东经90°方向。
导航坐标系(n系):导航时根据导航系统工作的需要而选取的作为导航基准的坐标系,本文选地理坐标系为导航坐标系,即东北天坐标系,Xn轴指向东,Yn轴指向北,Zn轴指向天顶。
惯导测量坐标系(b系):其原点为载体重心,Xb轴沿载体横轴指向右,Yb轴沿载体纵轴指向前,Zb轴沿载体竖轴指向上。
各坐标系之间的关系如图1所示[1]。
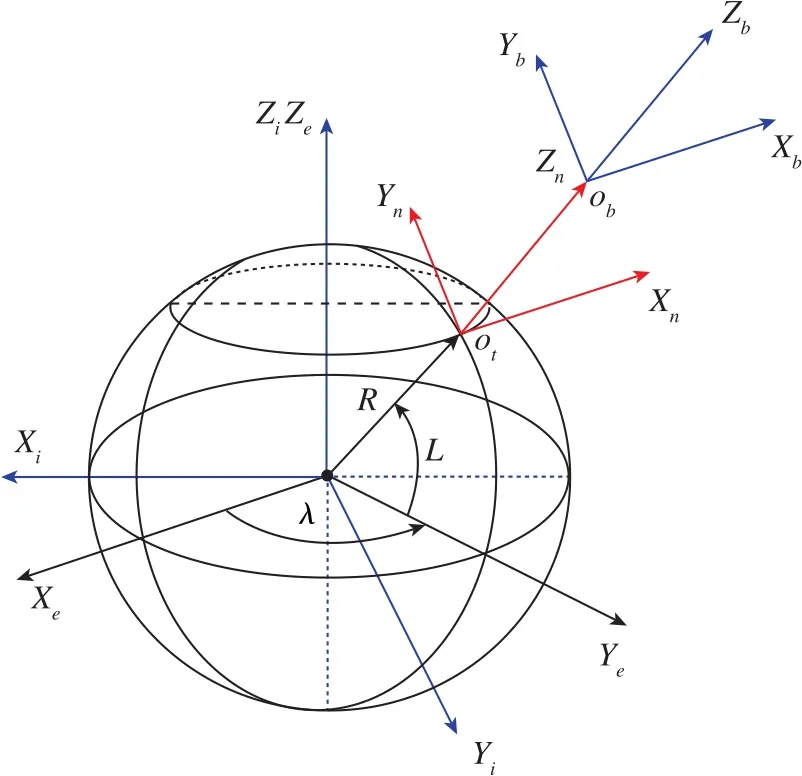
图1 坐标系示意图Fig.1 Schematic diagram of coordinate system
1.2 系统状态方程的建立
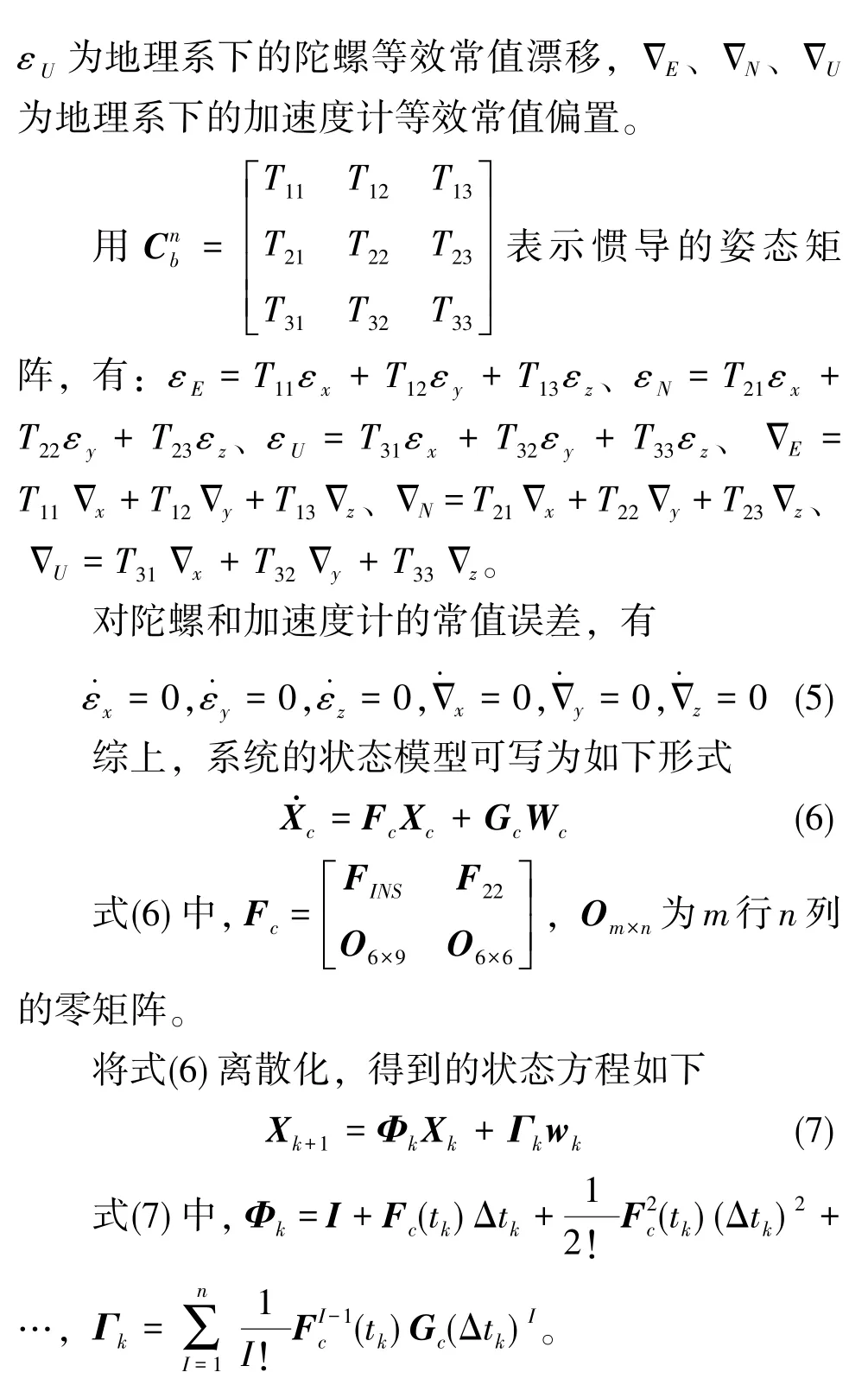
本文采用惯性卫星浅组合模式,仅将惯导的误差量作为组合导航系统的状态量,包括平台误差角、速度误差和位置误差。此外,可观测性分析及大量的仿真实验表明,在有航向变化的情况下,水平陀螺和加速度计的常值误差是可观测的,故将陀螺和加速度计的常值误差也建模为状态量。状态向量Xc如下

式(1)中,φE、φN、φU为东向、北向、天向的平台误差角,δvE、δvN、δvU为东向、北向、天向的速度偏差,δλ、δL、δh为经度、Δ纬度Δ、高Δ度偏差,εx、εy、εz为陀螺常值误差,x、y、z为加速度计常值误差。
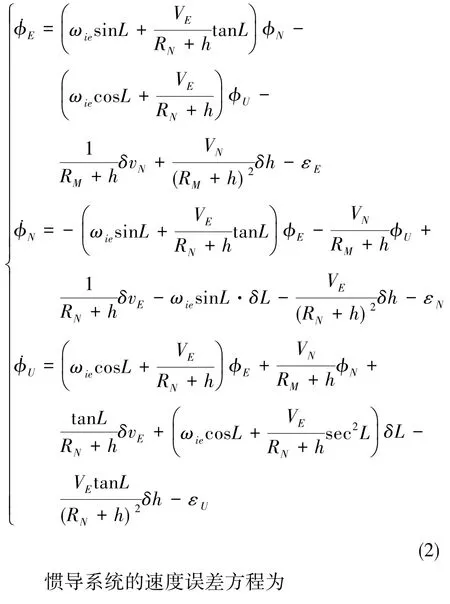
惯导系统的姿态误差方程为

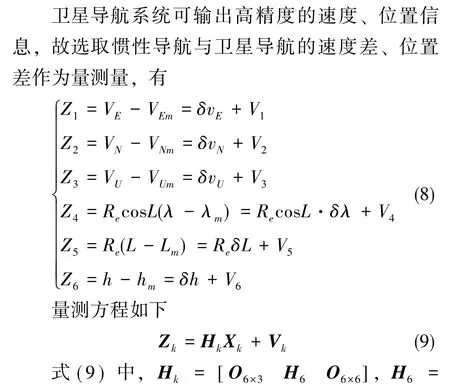
1.3 量测方程的建立
2 Kalman滤波算法
2.1 Kalman滤波新息的概念

2.2 基于新息的野值判定方法
对于GNSS/INS组合导航系统,若速度发生跳变,滤波新息会产生较大的误差。而由于速度是直接观测量,速度误差估值首先会跟随其变化,进而影响误差角估值。在滤波稳定后,新息ek的大小可以在一定程度上反映观测量的稳定程度。惯导的位置误差和速度误差变化是连续的,且在很短时间内变化较小,而且新息Kalman滤波过程中新息信号具有正交性,一旦量测值中出现野值,就会改变新息信号原有的性质,利用这一点可以引入判断函数来判定测量值是否是野值。根据新息ek的正交定理,可知

这里的ε是考虑系统滤波稳定后存在的计算和其他误差因素,通过设定一定的阈值范围,可以有效剔除不可靠的测量值。当判定出现野值时,以往采取的该时刻的量测信息如何处理等都是不确定的,如果用估计值替代,其结果是无法从观测之中得到新的信息,也就无法对估计状态进行修正,从而降低了滤波精度。本文采用的卫星导航系统的速度精度(RMS)为0.2m/s,通过多次实验将阈值设定为0.3m/s,所实现的滤波效果最好。
另外,由于仅仅简单将含有野值的测量值忽略不用,使得测量值中的有用信息没有得到有效、合理地应用。在实验中发现,一般卫星速度跳变时,其位置输出较为稳定,若因为速度跳变直接舍弃本次量测更新,又会造成辅助信息的浪费。因此,在监测到卫星速度发生跳变时,仅将本次速度相关新息置零,本次量测更新仅采用位置信息,这样既解决了速度跳变引起的误差,又可避免信息的浪费。
3 半实物仿真分析
为了验证上述野值判定及滤波改进方法的有效性,本文设计了半实物仿真实验,这里使用的惯性仪表的精度分别为:1)陀螺零偏:0.005(°)/h;2)加速度计零偏:5×10-5g。
为了更清晰地看到仿真效果,在以上精度的陀螺和加速度计上再人为添加1×10-4g的加速度计零偏误差,利用前面建立的惯导位置、速度及姿态误差、陀螺误差和加速度计误差模型,利用卫星的位置和速度作为测量信息,对状态误差进行Kalman滤波,然后利用误差估计结果修正惯导的导航结果及惯导的器件误差。
这里由于陀螺零位估值达到稳定需要的时间较长,故只分析了两个水平加速度计零位误差的估计效果和两个水平速度的误差。实验过程中,为了加速误差收敛速度,在对准完成进入导航时将惯导航向转180°。
所有实验过程均在已进行过校准的大理石平台上进行,实验过程中惯导的转动均由手动进行。
3.1 常规GNSS/INS组合导航系统半实物仿真分析
测量值稳定情况下,两个水平加速度计零位误差的估计效果和两个水平速度的误差如图2、图3所示。
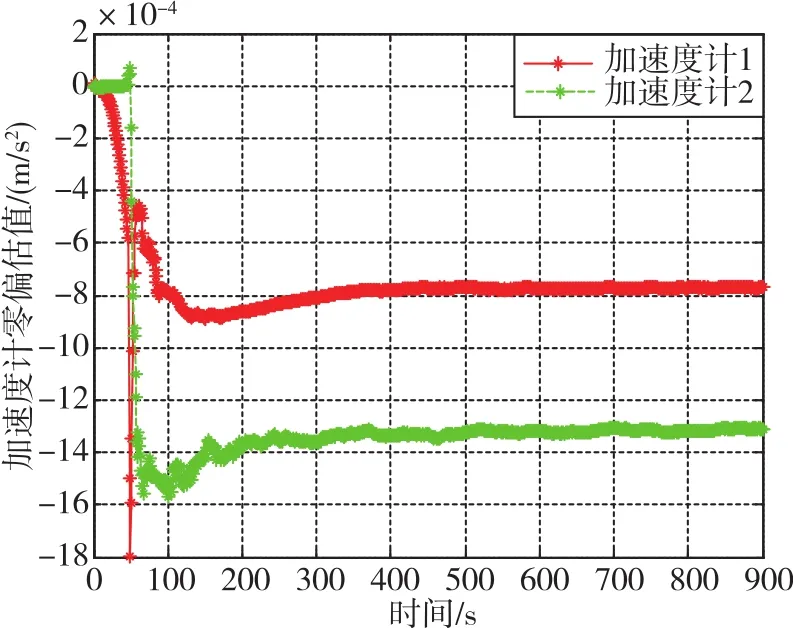
图2 测量值稳定时的两个水平加速度计的估值Fig.2 Estimation of two horizontal accelerometers when the measured value is stable

图3 测量值稳定时的两个水平速度误差Fig.3 Two horizontal velocity errors when the measured value is stable
在300s~310s期间人为添加0.3m/s的卫星速度误差模拟跳点,加完之后两个水平加速度计零位误差的估计效果和两个水平速度的误差如图4、图5所示。
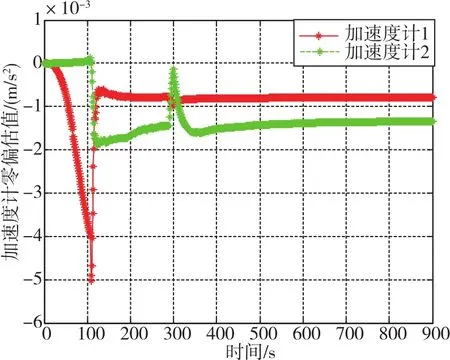
图4 测量值出现跳点时的两个水平加速度计的估值Fig.4 Estimation of two horizontal accelerometers when a hop point occurs in the measured value
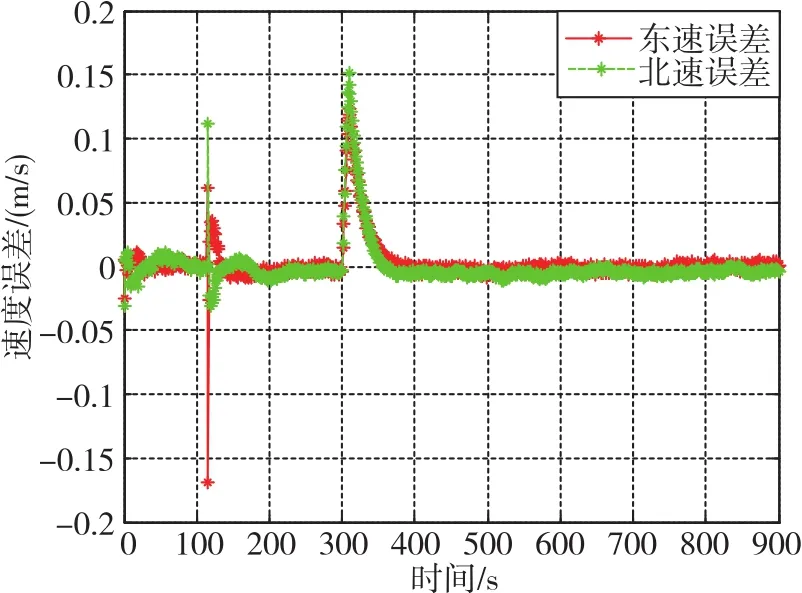
图5 测量值出现跳点时的两个水平速度误差Fig.5 Two horizontal velocity errors when a hop point occurs in the measured value
比较图2和图4的估计结果,可以得出:当测量值出现野值时,GNSS/INS组合导航系统的误差估计出现不稳定的现象,严重影响了误差估计的稳定性和准确度。因此,需要对野值进行判定并进行滤波改进。
3.2 改进后的GNSS/INS组合导航系统半实物仿真分析
根据反复的实验,本文选取速度测量值的新息阈值ε不大于0.3m/s。当速度误差估计值与新的测量值差值超过0.3m/s时,则认为本次测量值超限,即为野值。
在导航进行到300s~310s期间同样人为添加0.3m/s的卫星速度误差模拟跳点,采用前文中提出的新的判定野值和滤波改进的方法进行半实物仿真分析,得到的两个水平加速度计零位误差的估计效果和两个水平速度的误差如图6、图7所示。
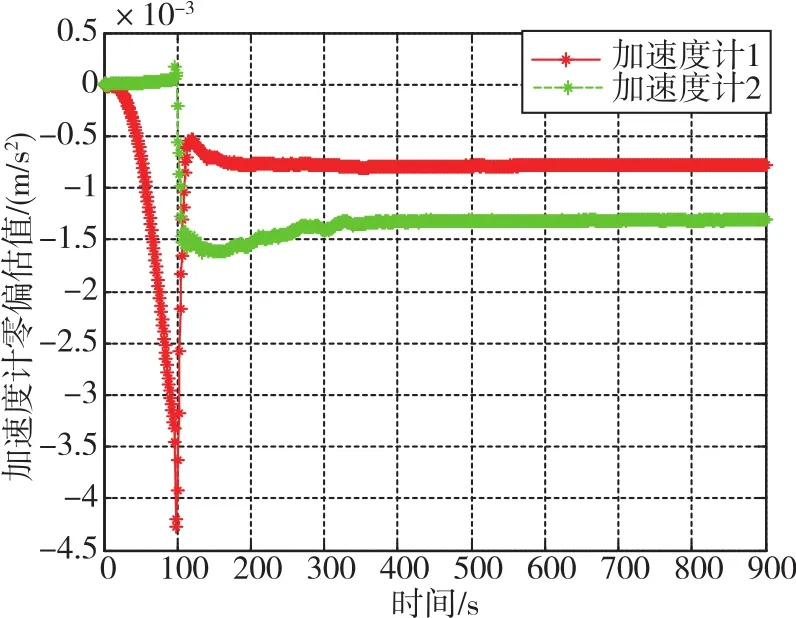
图6 改进后测量值出现跳点时的两个水平加速度计的估值Fig.6 Estimation of two horizontal accelerometers when a hop point occurs in the measured value after improvement

图7 改进后测量值出现跳点时的两个水平速度误差Fig.7 Two horizontal velocity errors when a hop point occurs in the measured value after improvement
另外,对GNSS/INS组合导航系统的位置和速度误差进行统计,结果如表1所示。
比较图4和图6的估计结果,可以得出:采用新的野值判定和滤波改进方法,两个水平加速度计零位误差的估计效果基本不受影响,两个水平速度的误差未再出现明显的波动,明显提升了滤波器的稳定性。再结合表1中的误差统计,组合导航系统的导航精度也得到了提高。
4 结论
惯性卫星组合导航系统能够准确、快速地进行误差估计的前提是卫星导航系统输出的载体速度、位置信息精度高,若卫星信号的输出发生跳变即出现野值,滤波器的稳定性和误差估值的准确性都会受到影响。在实际飞行中,卫星导航系统的速度会出现野值,若不采取野值剔除和滤波改进的方法,可能会影响组合导航系统的性能。半实物仿真结果表明,新方法既保证了量测向量原有的统计特性,同时也将野值带来的影响去除,滤波器的估计稳定性得到了明显提升,组合导航系统的速度和位置精度分别提升了30%和35%。
