基于数值虚拟飞行的自旋尾翼鸭式布局弹箭动态气动特性研究
2021-06-26庞川博蒋胜矩
庞川博,蒋胜矩,赵 超
(1 西安现代控制技术研究所,西安 710065;2 中国航空工业集团公司西安飞行自动控制研究所,西安 710065)
0 引言
鸭式布局是战术导弹以及小型制导火箭弹最常用的气动布局形式之一,由于舵面面积小、控制力臂长,因此具有响应快、操控效率高、铰链力矩小等优点;舵机常布置于弹体头部附近,有利于舱内组件的排布。当鸭舵舵面作滚转控制时,其产生的不对称洗流作用于尾翼上将诱导出反向滚转力矩,使得舵面产生的滚转控制力矩显著降低,在工程应用上通常被认为不能有效进行滚转控制。为了探索鸭舵控制时洗流的作用规律,国内外学者采用风洞试验或数值模拟的方法开展了大量的工作,提出了一系列有效的措施来改善鸭式布局的滚转控制效率[1-3],其中自旋尾翼是一种有效的途径,通过将尾翼套筒用轴承连接于弹身上,使得尾翼上诱导产生的滚转力矩与弹身解耦,从而达到滚转可控的目的。国外学者早在20世纪70年代起就开展了一系列针对自旋尾翼的风洞试验,对其控制效率和超声速气动特性进行了研究[4-5];国内雷娟棉[6]、张晓旻[7]等也通过风洞试验证实了自旋尾翼作为滚转控制改善措施的有效性。在数值计算方面,Blades[8]采用非结构网格对自旋尾翼流场进行了模拟;余奇华[9]等采用滑移网格研究了自旋尾翼在固定转速下对导弹气动特性的影响;Chen[10]等人研究了舵片固定偏转条件下自旋尾翼的运动状态以及绕流场分布;Liu[11]等人给出了自旋尾翼鸭式弹箭滚转操控力矩的估算方法,并通过风洞试验进行验证。目前围绕当鸭舵作实时滚转控制时,含自旋尾翼的鸭式布局弹箭的动态气动特性与控制特性所开展的研究还较少。
考虑到鸭式布局弹箭作滚转机动时具有舵片偏转频率高、弹体姿态响应快的特点,同时弹身与自旋尾翼还具有双旋运动的特征,采用数值虚拟飞行技术实现上述复杂运动的流场模拟是一种相对较好的手段。有别于静态常规测力风洞试验或定常气动数值计算仅能获取某固定状态下局部线化的气动力系数和导数,数值虚拟飞行技术通过实时耦合求解弹体气动载荷/运动状态/操纵面指令,能够最大化还原机动飞行过程中非定常、非线性的流动现象。经过近20年CFD理论与计算机硬件的快速发展,西方先进国家在虚拟飞行动态数值模拟技术上已取得了较大的进展[12-14],国内相关单位和学者也开展了大量的研究[15-19],但更多是针对无控运动或开环控制过程。近年陶洋[20]等对方形截面导弹纵向运动进行了研究,在双时间步内采用配平算法进行反馈控制,实现了导弹纵向姿态保持与变攻角机动过程的模拟;席柯、黄宇[21-22]等人在非定常求解器基础上加入了六自由度运动模块与PID闭环控制率模块,使机动过程的模拟更接近于真实飞行过程;常兴华、Zhang[23-24]等人对导弹姿态角控制过程、过载控制过程以及变马赫数条件下的控制过程进行了数值模拟,得到的结果与试验一致性较好,并在此基础上开展了高机动导弹的控制率设计研究。文中基于动态嵌套网格流场求解器,发展了耦合求解动力、运动、闭环舵偏控制的一体化数值模拟手段,对鸭式布局弹箭尾翼自旋/固定时滚转机动特性进行数值模拟,并对其弹体动态气动特性与控制特性展开讨论。
1 一体化数值模拟方法
1.1 流动控制方程
将三维非定常可压缩NS方程写为如下形式:
(1)
式中:Ω为控制体;∂Ω为单位控制体边界表面积;n为积分面的单位法向矢量;Q为守恒形式的状态变量;F(Q)与G(Q)分别为对流项通量、粘性项通量。采用适用于非结构网格的二阶有限体积法求解流场,时间推进采用隐式双时间步方法。采用Menterk-ωSST湍流模型,其具体构造与特性见文献[25]。为了提高计算效率,采用基于MPI的分块网格并行技术。
1.2 6DOF运动求解
运动过程中计算模型的姿态、位置的变化通过求解其动力学方程组与运动学方程组得到,在惯性系下,计算模型质心的平动动力学方程组可写成
(2)
式中:m为质量;V为模型质心的速度矢量;Pe为模型受到的合外力,无动力条件下通常为气动力和重力。在跟随模型运动的动坐标系下,其转动动力学方程为:
(3)
式中:模型所受合力矩为M;其惯性矩张量矩阵为L;转动角速度为ω。在已有当前时刻气动载荷的前提下,求解式(2)~式(3)得到当前的加速度与角加速度,再通过以下运动方程组求解得到计算模型的线位移与欧拉角。
(4)
式(4)中线速度与线位移均在惯性坐标系中进行描述,而角速度在当前计算模型运动坐标系中进行描述。欧拉角则用于在惯性系下描述当前时刻计算模型的姿态,满足x-y-z顺规。在进行无控自由飞模拟时,随时间推进依次交替求解式(1)与式(2)、式(3)、式(4)即可得到当前时刻计算模型的气动载荷、绕流场分布以及运动状态。当计算模型同时包含弹身与可动操纵面时,操纵面与弹身还具有相对角运动,需当作相互独立的部件进行运动学计算,不同的部件保留各自的运动中心以及各自当地的随体动坐标系,在跟随弹身运动时,还需要依次单独求解操纵面的运动。以鸭舵舵面为例,为便于描述其偏转状态,其转动中心被设置在舵根部转轴处,舵随体坐标系原点与转动中心重合,在初始时刻3个坐标轴方向与惯性系一致,首先在舵坐标系下写出弹体当前时刻的角速度,可得到:
(5)
式中:Rx,Ry,Rz为基于当前时刻弹体欧拉角的旋转矩阵;Rx′,Ry′,Rz′为基于当前时刻舵面欧拉角的旋转矩阵,上标b与f分别表示矢量在弹体动坐标系或舵动坐标系下进行描述。考虑到通过旋转矩阵与欧拉角来描述参考系旋转需要进行多次矩阵运算与三角函数运算,计算效率较低且内存占用较大,此处采用四元数来描述不同坐标系间的相对位置关系,式(5)可重新写为:
(6)
式中:qb与qf分别为描述当前时刻弹体姿态和舵片姿态的四元数,符号*表示四元数的矢量乘法,式(6)可得到在舵坐标系下因弹身转动而牵连产生的角速度,在启控过程中,舵片的合角速度可写作:
(7)
(8)

(9)
同时也可以得到下一时刻描述舵片姿态的四元数:
qf_next=qf*dq
(10)
式(6)~式(10)可用于计算在考虑弹身运动时舵片姿态的变化。由于舵片启控时仅进行转动运动,其位置的变化完全由弹身的牵连运动产生,在惯性系下,时间步推进一步时弹体因角运动产生的角位移为:
(11)
其中ωi表示在惯性系下描述弹体角速度,采用类似式(6)的方式将弹体系下角速度转换至惯性系下即可。同理,将惯性系下角位移增量dAi写成四元数的表达形式qr后,存在如下关系:
(12)
lg与lg_pre分别表示当前时刻与上一时刻弹体质心到舵轴中心的矢径,弹体平动产生的牵连线速度和线位移分别为vi和li,舵片由弹身转动引起的总线位移ltotal和总线速度vtotal可写为:
(13)
1.3 控制系统求解
(14)
令KI=KP/TI,KD=KP·TD,则KP、KI、KD分别为PID控制器中的比例系数、积分系数与微分系数。以单通道姿态控制为例,e(t)为当前姿态角与目标姿态角的偏差量,c(t)为控制器输出的控制量,对于小尺寸制导火箭弹的滚转控制,控制量与目标舵偏角r(t)可以写成如式(15)所示关系。
(15)
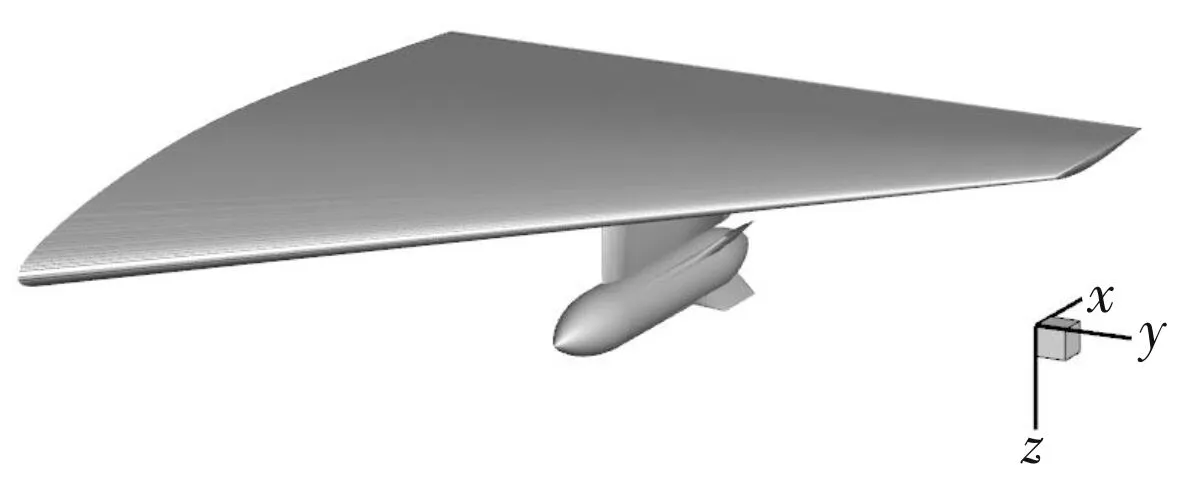
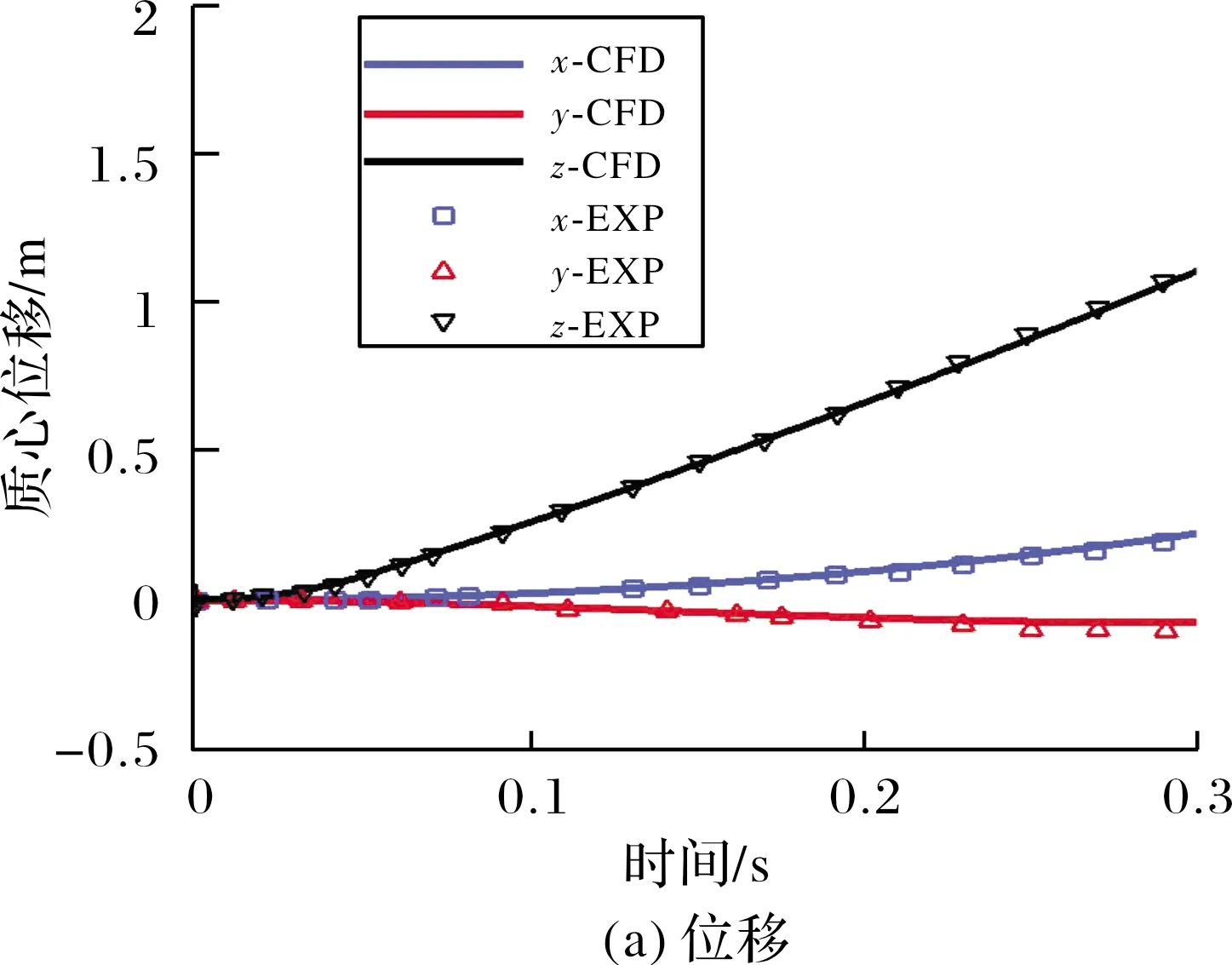
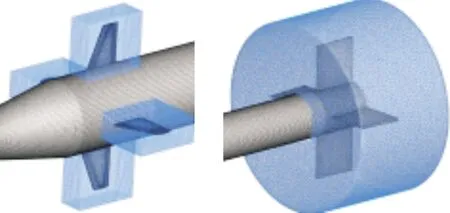
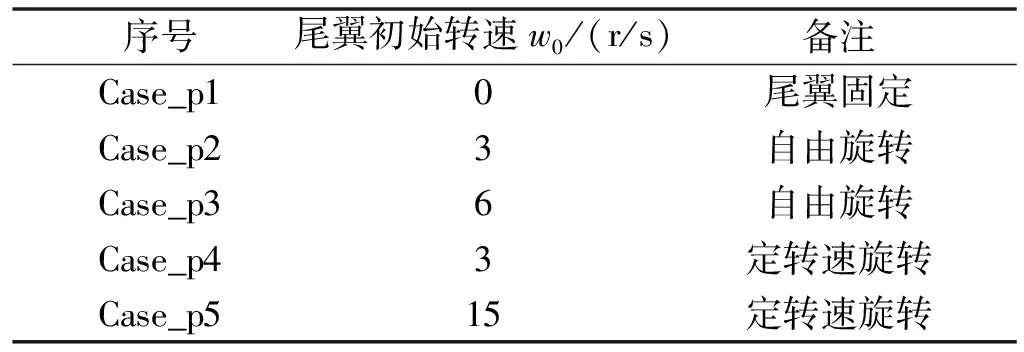
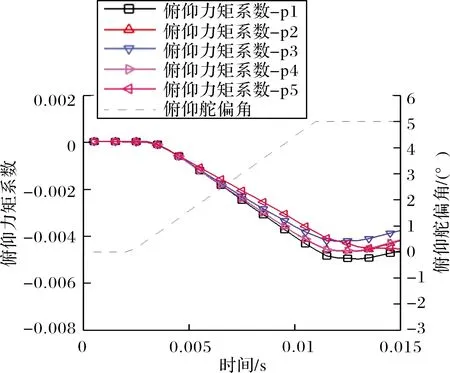
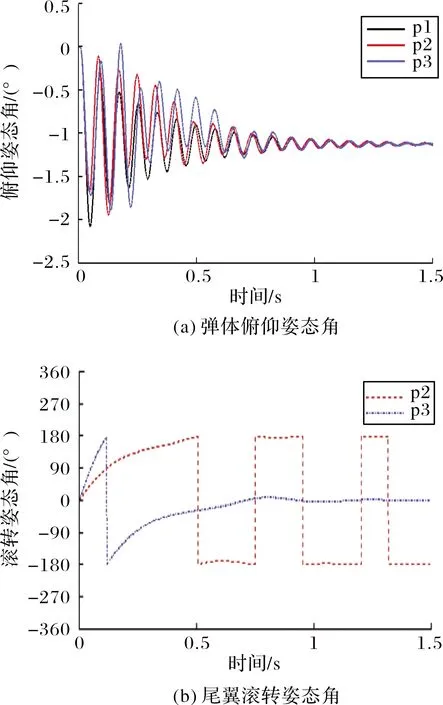
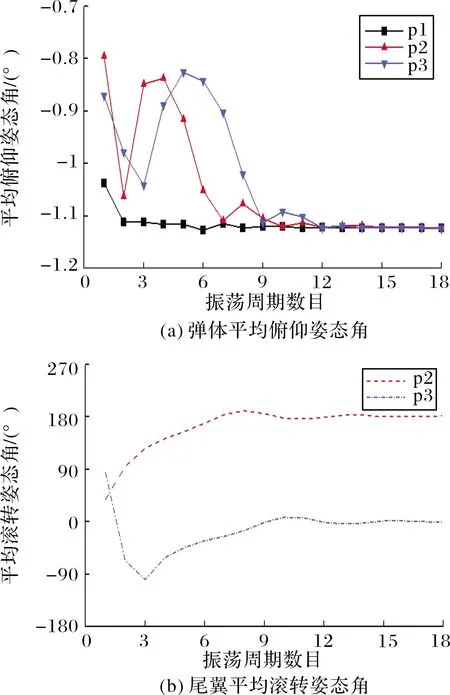
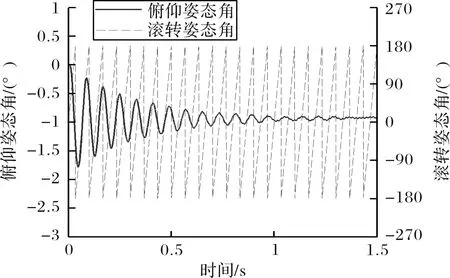
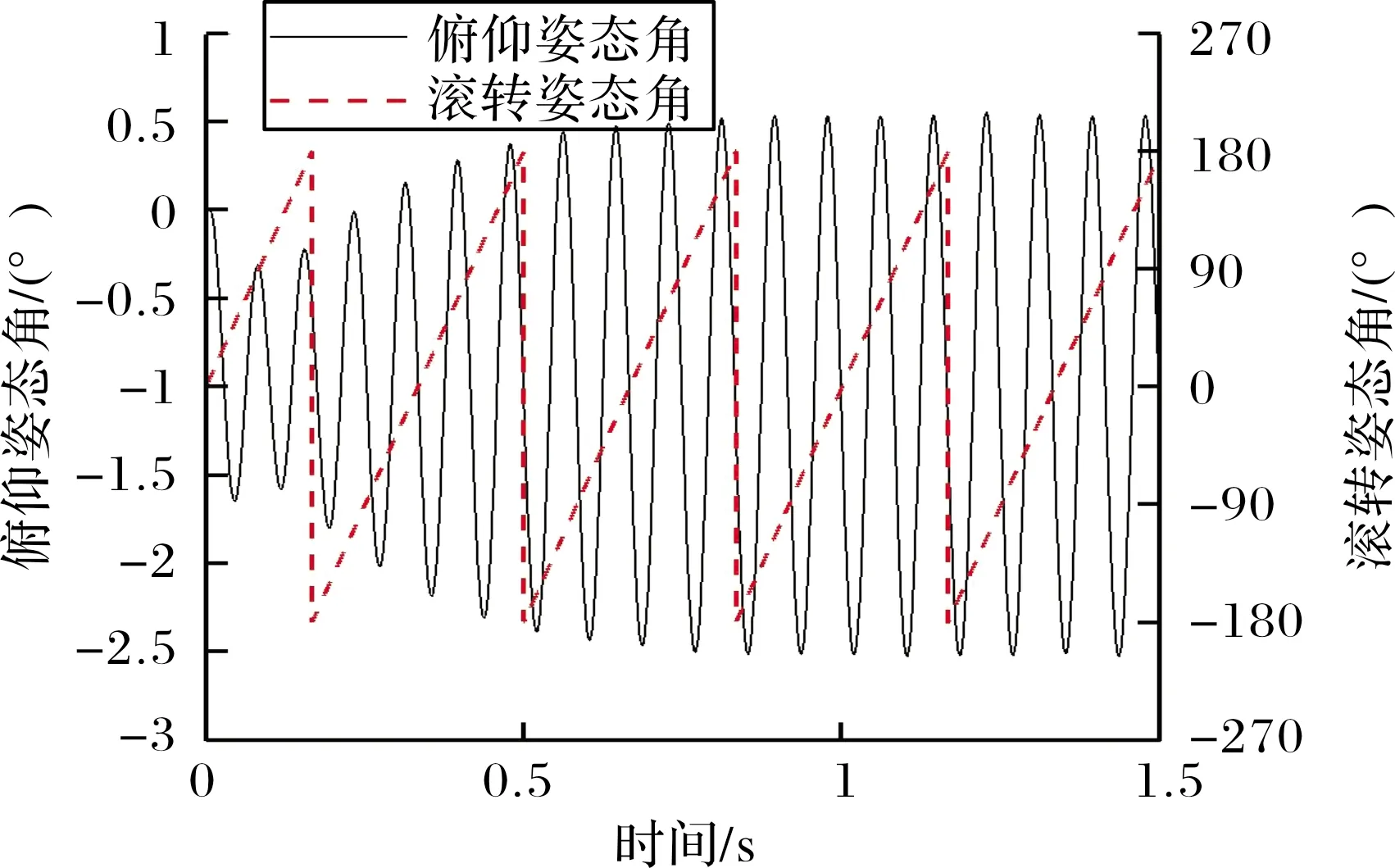
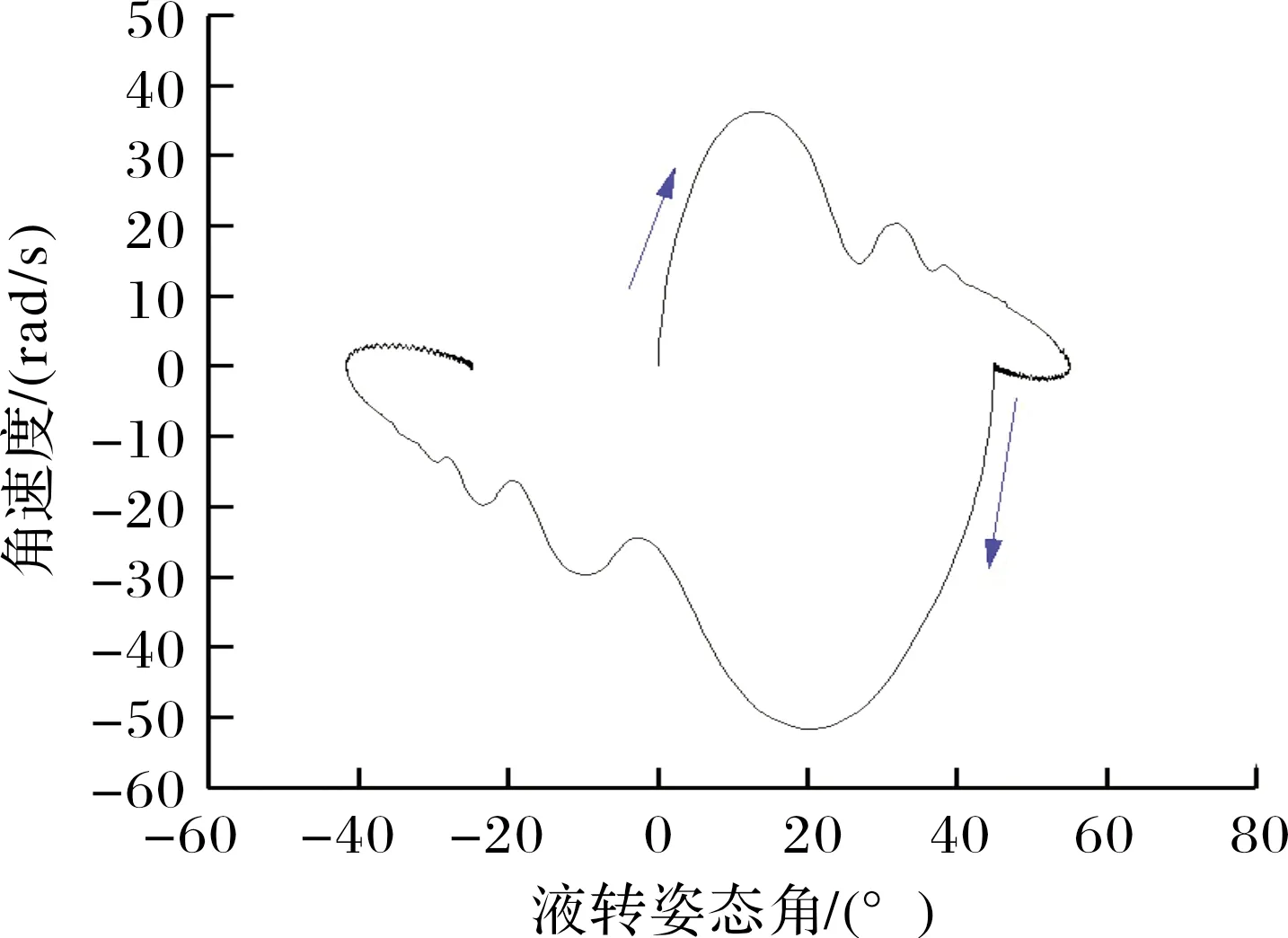
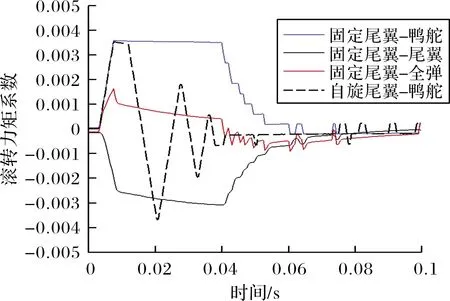
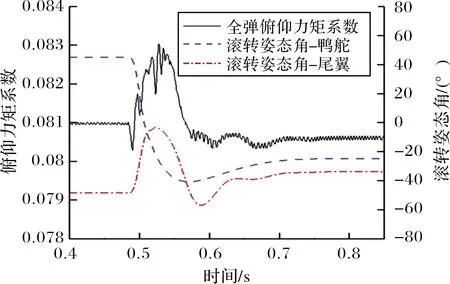
Fmax为通道舵偏角最大限幅。小尺寸制导火箭弹极转动惯量往往很小,弹体滚转响应速度快,加之滚转控制系统属于中立稳定系统,通过限幅可以有效避免滚转角变化率超过舵片的转动速率,有利于增强控制系统稳定性。由于舵片偏转角速度由舵机自身能力决定,且舵机响应时间通常大于流动求解非定常时间步长,舵机在两次接收控制信号之间依然沿用上一次的控制指令,在一次舵机响应时间间隔内,舵片偏转运动角位移始终保持连续且角速率保持一致,更加符合真实运动过程。当计算时刻t满足tst+nT≤t (16) 当目标舵偏角为零或达到设定的限幅时,式(16)右侧为零。耦合闭环控制系统的六自由度运动非定常流场求解过程分为以下步骤:1)通过定常方法求解初始状态下的流场;2)以定常流场为初始条件开展非定常计算,得到时间步推进一步时弹体所受非定常气动载荷;3)控制系统根据当前弹体姿态解算目标舵偏角,得到当前时刻舵片的控制偏转角速度;4)根据当前气动载荷计算得到弹体的线加速度与角加速度;5)根据步骤3~步骤4计算得到当前时刻弹体与舵片的姿态与线位移,更新全弹的姿态和位置,更新计算网格;6)推进时间步,求解更新后网格的非定常流场。重复步骤3~步骤6,直至计算结束。 通过模拟典型外挂物投放的运动过程来验证文中非定常流场计算模块与运动模块耦合求解的正确性。计算模型由机翼、挂架与外挂物组成,其外形如图1所示。 图1 机翼-外挂物模型 该外形多次用于嵌套网格与动态运动过程的验证[18,23],模型尺寸、来流条件参考文献[26]。采用非结构网格对计算域进行空间离散,在外挂物掉落途经区域加密背景体网格,在机翼、外挂物的前后缘同样进行加密,物面边界层网格以棱柱网格为主,底层高度为1×10-5m。通过计算,得到外挂物分离掉落后质心位置改变随时间变化的曲线如图2(a)所示,欧拉角曲线如图2(b)所示,线速度与角速度随时间变化的曲线如图2(c)与图2(d)所示。对比计算结果与试验值可知,文中采用的耦合计算方法在求解物体运动过程中非定常流场时能够取得较好的效果。 图2 CFD结果与试验结果对比 采用的研究模型为典型鸭式布局导弹,外形如图3所示。弹身由头部锥段与圆柱段组成,长径比L/D=11.2,在头锥后布置有4片鸭舵,弹尾处布置有4片尾翼,在初始状态时舵、翼方位呈“++”状态,舵尾间距为7.75D。计算模型忽略舵轴的影响,鸭舵底部与弹身之间缝隙距离为0.059D,旋转尾翼所在的圆柱形套筒的轴向长度为1.2D,为保证计算过程中物面边界间互不干涉,套筒与弹身圆柱段留有微小的缝隙,缝隙距离为0.000 3D。 图3 鸭式布局导弹示意图 流场空间采用非结构嵌套网格进行离散,具体如图4所示,弹身、4片鸭舵以及旋转尾翼独立生成计算网格,同时弹身网格也当作背景网格。不同部件间网格存在重叠或嵌套的关系,流场信息在部件网格重叠区域通过插值进行传递,部件之间存在相对运动时网格不进行变形,具有鲁棒性好、使用方便的优点。计算域呈圆柱形,上游到弹头距离为12L,下游距离弹尾14L,远场边界距弹轴11L,边界层第一层高度为3×10-5L。 图4 鸭式布局导弹嵌套网格示意图 含自旋尾翼的鸭式布局火箭弹在飞行过程中尾翼处于自由旋转状态,当受到不对称来流扰动时,自旋尾翼处于转动状态,此时作俯仰机动控制,旋转尾翼将受到鸭舵洗流的作用。取来流马赫数Ma=3.0,雷诺数Re=6.98×107,温度Tref=288.15 K,将鸭舵呈俯仰5°舵偏角放置,尾翼自旋角速度固定为3 r/s与6 r/s,弹体相对来流呈0°攻角且姿态保持固定,取非定常时间步长Δt=5×10-4s。在[-180°,180°]区间内表示弹体滚转姿态角,给出旋转尾翼的姿态与受力变化,如图5所示,在洗流的作用下,尾翼受到向下的法向力且随尾翼自旋呈周期性变化,初始时刻法向力的值最大,洗流作用最显著,此时尾翼姿态为“十”型;当其转过45°后变为“X”型后,法向力值达到最小,说明此时洗流强度最小。尾翼以较低的角速度旋转时,自旋一周对应其俯仰方向洗流强弱交替周期变化4次,且法向力的变化仅与当前尾翼所处相位角相关,自旋角速度的大小对其受洗流强度几乎无影响。 图5 旋转尾翼姿态与所受法向力 继续研究在尾翼自由旋转的状态下,弹体作俯仰操控时全弹的俯仰姿态响应变化。舵片偏转速度设为10 rad/s,预设的俯仰舵偏规律如下: 其中首次启控时刻tst=0.002 s,当非定常计算时间大于启控时刻时,舵片开始按预设规律偏转,直至达到目标舵偏角。由于舵片偏转速度很大,舵偏角变化规律近似于阶跃型函数。尾翼运动状态分为固定不旋转、赋初始转速自由旋转与固定转速旋转3类,如表1所示。 表1 计算工况 w0为非定常计算开始时刻尾翼初始转速,旋转尾翼无几何赋旋特征时,其旋转状态受控制引起的洗流影响以及飞行中扰动的作用呈低速微旋状态,3 r/s符合多数小型倾斜稳定火箭弹受到较大扰动时弹体的转速,以此转速为尾翼旋转的角速度具有一定实际意义;当尾翼具有斜切或斜置等赋旋特征时,在一定飞行速度下其以较固定的转速旋转,此处以尾翼定转速旋转来进行模拟。来流状态与上文保持一致,首先求解定常流场直至流动稳定,并以此为初场进行非定常计算,t=0 s时刻尾翼按文中设定条件开始运动。舵翼作俯仰偏转运动时弹体俯仰力矩变化如图6所示,在刚开始启控后2~3 ms内,舵片上立即产生正向的法向力,由于尾翼上的洗流效应不明显,不同工况下全弹俯仰力矩变化也较为一致。随时间推进,鸭舵产生的下洗流动逐渐作用于弹身及尾翼上,弹体与舵翼、尾翼翼面产生的合力矩即为当前时刻操控力矩与恢复力矩之和,在计算初期,弹体俯仰姿态变化极小,可忽略弹体产生的恢复力矩,此时给出的弹体俯仰力矩可认为是该段时间内的操控力矩。t=0.012 s时刻,舵片已达到预设偏转角,由于工况p1尾翼始终固定为“十”型姿态,受洗流影响最大,全弹俯仰操控力矩最大;工况p2和工况p4此时尾翼所处相位接近,所受操控力矩也接近;工况p3尾翼自旋角速度较大,尾翼相位姿态更加接近于“X”型姿态,所受俯仰操控力矩最小;工况p5的尾翼自旋角速度最大,首次操控力矩最大值出现在t=0.0145 s附近,受洗流作用影响的时间明显滞后于其他工况,说明转速越高,旋转尾翼对洗流作用的响应时间越长。 图6 弹体俯仰力矩与舵偏角变化 尾翼固定与自由旋转时全弹姿态角变化曲线如图7所示,在空气阻尼的影响下,尾翼自由旋转最终转过的角度大约为180°与360°(对应初始转速3 r/s与6 r/s)。从工况p1可知,当前马赫数下弹体的俯仰振荡周期约为82.2 ms,当尾翼以低转速旋转时,3种工况俯仰振荡周期差别不大,且随尾翼旋转角速度降低而趋于一致;并且工况p2与p3每次俯仰振荡的中值(平均俯仰姿态角)更小,将工况p1,p2,p3的姿态角按俯仰振荡周期进行平均后得到如图8所示的曲线。 图7 固定尾翼与自旋尾翼条件下弹体姿态角 图8 每个俯仰运动周期的平均姿态角 图8中横轴表示俯仰振荡周期数目,其中工况p1尾翼固定,其滚转姿态角始终为0°,此时洗流影响最大,相应俯仰操控力矩也最大,故其俯仰姿态角的周期均值基本保持一致;工况p2与p3在一个振荡周期内的俯仰姿态角均值与当前周期的平均滚转角相关,当该周期的平均滚转角越接近0°,90°,180°,即尾翼姿态越接近“十”型时,对应操控力矩越大,俯仰姿态角均值也越大。随着时间进一步推进,受阻尼影响俯仰振荡振幅逐步减小,自旋尾翼的角速度也降低至零,此时3种工况的尾翼相位姿态基本一致,俯仰姿态角也逐渐趋于一致。 在工况p5中,尾翼以较高转速定速旋转,其姿态角随时间的曲线如图9所示,全弹俯仰角依然呈振荡收敛趋势,其振荡周期约为80.8 ms,最终收敛的俯仰平衡状态约为-0.93°,与工况p1对比可知,尾翼以较高角速度定速自旋对俯仰振荡周期或频率影响很小,但由于尾翼姿态在“十”型、“X”型之间反复变化,受洗流的作用强度降低,综合俯仰控制能力更弱,最终能达到的平衡俯仰角更小。通过分析,尾翼作定速旋转运动时,其俯仰方向受力与力矩随转动呈周期性变化,且在当前来流速度下,尾翼自旋一周,其受到的法向力周期变化4次,当洗流强度变化周期与俯仰振荡周期接近,即尾翼自旋周期为弹体俯仰振荡周期的4倍左右时,会产生类似共振的现象,此时弹体姿态受定速旋转尾翼上的交变气动载荷的影响,全弹俯仰角将在平衡位置附近来回振荡。工况p4下全弹滚转姿态角与俯仰姿态角的变化曲线如图10所示,可知在尾翼自旋经过3个周期后全弹俯仰振荡最大幅值与振荡频率值趋于稳定,此时弹体在俯仰角-1.013°附近、以振幅约1.5°进行俯仰振荡。 图9 工况p5条件下的姿态角 图10 工况p4条件下的姿态角 讨论了自旋尾翼对火箭弹俯仰动态特性的影响,下面对其滚转控制特性以及滚转操控过程中对纵向气动特性的影响进行分析。预先设定的弹体滚转姿态角变化要求为:非定常计算开始后经过2 ms启动控制,要求弹体沿x轴正向转动45°后并保持该姿态角,姿态稳定一段时间后,将弹体滚转姿态角控制至-25°,保持该姿态直至计算结束。 不同于俯仰机动,在作滚转控制时4片鸭舵都将进行偏转,非定常模拟时仅释放弹体滚转方向的自由度,鸭舵与尾翼在计算初始时刻相对攻角平面均处于“++”方位,旋转尾翼初始角速度为零,来流条件保持与第3节中一致。首先模拟零攻角状态下含自旋尾翼的鸭式布局火箭弹滚转控制过程,给出了弹体滚转姿态角的响应曲线以及滚转角速度相对滚转姿态角的相图,如图11(a)所示,2次滚转姿态控制过程均较快速且稳定,控制超调量约为22%,姿态过渡时间约为0.3 s,姿态振荡次数小于1次,计算滚转通道舵偏角限幅Fmax=2.5°。如图11(b)与图12所示,当前限幅条件下弹体响应速度仍相当快,2次姿态控制过程中弹体的转动角速度均远远超过了舵片的偏转角速度,机动过程中控制模块需要反复给出反向舵偏指令来对弹体滚转角速度进行控制,使超调量不至于过大从而避免控制发散,也反映出采用旋转尾翼后鸭舵控制能力较强的特点。达到控制目标后,弹体处于姿态保持阶段,由于弹体在滚转方向为中立稳定系统,为了抵消由空间离散与数值方法引起的扰动对姿态的影响,控制模块依据弹体受力的变化仍不断给出控制指令,舵片按要求进行反复小幅度的偏转来保持所要求的姿态。 图11 自旋尾翼条件下舵偏角及弹体姿态 图12 自旋尾翼条件下角速度随滚转姿态角变化曲线 为了直观对比自由旋转尾翼对提高控制效率的作用,将模型的旋转尾翼改为“十”型布置的固定尾翼,在相同来流条件下,保持控制参数一致,进行从滚转姿态角0°至45°的姿态控制,滚转舵偏限幅仍设为Fmax=2.5°,得到滚转姿态角、舵偏角随时间的变化曲线以及弹体滚转角速度随滚转姿态角变化的曲线。 如图13所示,固定尾翼条件下实现鸭舵滚转控制的姿态过渡时间与旋转尾翼工况接近,但在姿态变化启动过程中所使用到的平均滚转舵偏角显然更大,舵控时间也更长,在t为0~0.05 s时滚转舵偏角始终处于最大限幅状态,超调量约为33%,大于文中旋转尾翼工况的超调量,且在姿态保持阶段(t>0.3 s)用到的滚转舵偏角也更大。以图14可知,在舵控时间增长、平均舵偏角更大的前提下,弹体最大角速度仅约为22 rad/s,小于旋转尾翼工况时的36 rad/s。以上现象均说明在尾翼固定情况下鸭舵的滚转控制能力大幅减弱,给出滚转控制前期鸭舵与尾翼的滚转力矩系数变化曲线如图15所示,图中分别给出尾翼固定和尾翼自由旋转两种条件下弹体各部件的滚转力矩,可知二者在鸭舵上能够产生的最大滚转力矩一致,但尾翼固定时在尾翼上会产生显著的反向诱导力矩,t=0.01 s时自旋尾翼工况的滚转控制能力约为固定尾翼工况的3.5倍,随着弹体转速加快,固定尾翼上的反向诱导力矩逐步增大,在t=0.04 s时诱导力矩大小可达到鸭舵控制力矩的88%,合滚转力矩仅为鸭舵控制力矩的12%,此时滚转控制能力仅是自旋尾翼工况的1/9。 图13 固定尾翼条件下舵偏角及弹体姿态随时间变化曲线 图14 固定尾翼条件下角速度随滚转姿态角变化曲线 图15 不同部件的滚转力矩随时间变化 由此可知,当采用固定尾翼时,尽管在当前来流状态下能够实现鸭舵滚转控制,但实际控制能力已经远小于同样外形自由旋转尾翼的工况,当舵翼尺寸进一步减小、弹体转动惯量增大或降低滚转舵偏限幅时,弹体滚转控制能力进一步减弱,尾翼固定与自旋尾翼所引起的滚转控制效率的差异将会更大。 在小攻角状态下,讨论自旋尾翼弹箭滚转机动过程中俯仰方向气动特性变化。计算来流攻角取α=4°,其余来流状态、计算条件以及姿态控制条件均保持与文中含自旋尾翼工况所描述一致,取非定常计算的前0.06 s(对应第一次滚转姿态控制的舵控时间段),给出来流有/无攻角时弹体的滚转舵偏角曲线与滚转力矩曲线。 如图16所示,小攻角条件下,来流攻角对滚转操控特性影响较小,在采用相同控制参数时,两种工况均先给出限幅条件下最大舵偏指令,持续30 ms后又同时给出了反向舵偏指令来抑制弹体转动速度,由图中力矩曲线可知,在相同舵偏角条件下来流有攻角时将产生略微更大的滚转操控力矩,从而在t=0.02 s附近给出抑制弹体滚转角速度的反向舵偏指令持续时间更长,也使得后续时间里舵片的大幅偏转次数更多。 图16 滚转舵偏角与滚转力矩随时间变化 图17中给出了小攻角下第二次滚转姿态控制阶段(滚转角从45°变化至-25°)全弹的俯仰力矩变化曲线,同时也给出了尾翼和鸭舵的滚转姿态角,此时鸭舵仅进行滚转控制,弹体的俯仰力矩可认为是驱使姿态恢复至平衡状态的恢复力矩。如图17所示,尽管控制过程中尾翼与鸭舵的相位姿态、转动角速度、以及鸭舵舵偏角均出现较大的变化,全弹俯仰力矩改变量仍然较小(不超过3%),且在控制前后的姿态维持阶段(图中t>0.8 s以及t<0.48 s)全弹的俯仰力矩改变量小于1%,说明自旋尾翼在滚转控制过程中,其相位、角速度所发生的变化对全弹纵向气动特性影响十分有限。 图17 全弹俯仰力矩与舵、翼滚转姿态角随时间变化 通过耦合求解流动控制方程、动力学方程与飞行控制率,对含自旋尾翼的鸭式布局弹箭进行了数值模拟,重点关注其俯仰动态特性与滚转姿态操控特性,通过对气动载荷、运动姿态进行分析,得出以下结论: 1)尾翼旋转时,鸭舵诱发的洗流作用效果呈周期性变化,对于中等长细比弹箭在小攻角条件下,洗流作用效果仅与当前尾翼的相位姿态相关,当尾翼姿态呈“十”型时洗流效果最明显,尾翼自旋角速度大小对其受洗流作用强度基本无影响。 2)弹体俯仰机动过程中,自旋尾翼旋转角速度越大,鸭舵产生洗流作用于尾翼的时刻更加滞后;尾翼以不同初始转速自由旋转时,不影响弹体作俯仰机动后俯仰振荡收敛所需的时间与最终达到的平衡角度,仅在振荡过程中因尾翼相位姿态角不同而引起瞬时操纵力矩不同,进而俯仰振荡幅值与均值出现差异。尾翼定速旋转时,较高的转速使得纵向洗流效果减弱,俯仰控制能力降低,当定速旋转周期接近振荡周期的4倍时,会产生类似共振的现象,此时弹体会在平衡位置附近进行俯仰振荡。 3)所采用的数值虚拟飞行技术能够较好模拟弹箭滚转姿态闭环控制过程。通过比较尾翼固定与自由旋转弹体作滚转机动时的力矩变化,尾翼固定时的滚转操控能力大幅降低;在小攻角条件下,攻角变化对自旋尾翼弹箭滚转操控能力影响不明显,在滚转控制过程中,自旋尾翼姿态的变化对全弹纵向气动特性影响较小。
2 数值方法验证
3 纵向气动特性研究


4 滚转控制动态特性研究




5 结论
