XCTD与CTD的对比测试研究
2021-06-24于宗泽傅晓洲俞欣沁
徐 泽,于宗泽,傅晓洲,俞欣沁
(广州海洋地质调查局,广东 广州 510700)
20世纪70年代出现的多波束测深系统深刻改变了海洋水深调查的方式,极大地提高了水深测量的作业效率[1]。由于多波束测深系统在工作过程中呈扇面状发射和接收声波信号,然后根据声传播旅行时和海水声速确定水深。因此,在多波束水深测量过程中,海水声速剖面的准确获取以及声速的改正对于最终的水深成果质量至关重要,不合理的声速将导致观测到的海底地形呈凹凸状[2-3]。
目前,海水声速测量方式有两种:一种是间接声速测量,另一种是直接声速测量[4]。间接声速测量是根据温度、盐度和压力数据,用特定的计算公式确定海水声速,直接声速测量则是通过测量声速在某一固定距离上传播的时间或相位,从而直接计算海水声速。间接声速剖面测量代表性仪器有美国海鸟公司(SeaBird)生产的CTD,直接声速剖面测量代表性仪器有AML公司生产的不同系列的声速剖面仪。目前,进行声速剖面测量时多采用声速剖面仪直接测量声速剖面,在测量船停船时,通过钢缆绞车投放声速剖面仪。当水深较深时,导致投放回收时间较长,同时,受声速剖面的时空限制,当声速剖面不满足要求时,需要停船并重新做声速剖面的测量,导致海上调查作业效率较为低下。
为了提高海上多波束水深调查作业的效率,在非停船作业模式下快速获取海水声速剖面,利用XCTD以及抛弃式温度剖面测量仪(XBT)间接测量声速剖面已得到广泛应用[4-5]。然而,XCTD与XBT作业效率虽高,但是其探测深度有限。并且,XBT无法观测海水的盐度信息,其对深水海域的海水声速测量影响较重,并进一步影响到水深测量精度。为了解决XBT无盐度信息的问题,有学者提出了联合XBT与WOA13模型盐度信息确定声速剖面的解决办法[6],但是WOA13模型盐度数据是对多年每月的盐度数据取平均值,分辨率较低[7]。
为了解决海上调查作业效率较低的问题,同时保证多波束测深的精度,本文介绍了CTD与XCTD作业原理,对比了同一时间、同一站位的CTD、XCTD及声速剖面仪观测得到的声速剖面数据,探讨了利用CTD与XCTD提高多波束水深调查的作业效率。
1 CTD与XCTD原理
1. 1 CTD原理
CTD广泛应用于海洋调查中,是目前应用最多的海水温度、盐度与深度参数测量设备。利用CTD观测得到的温度、盐度和深度数据,结合声速经验模型,可以间接确定海水声速。其中,最具代表性的是海鸟公司的SBE 917Plus CTD剖面仪。SBE 917Plus CTD剖面仪搭载的传感器采用模块化设计,能够快速准确地获取海水的温度、电导率和深度参数。系统主要包括SBE 9Plus CTD单元、SBE 17Plus SEARAM存储单元和SBE32采水器。
SBE 9Plus CTD单元是温盐深要素测量的主要执行者,其内部安装有电导率、温度和带温度补偿的高精度石英压力传感器,为减小船体升降引起的盐度尖峰效应,采用TC导管将温度和电导率传感器连接在一起,通过水泵迫使海水以恒定速率通过感温原件和电导池,从而可以获取同一水团的温度和电导率数据[8]。
SBE 17Plus SEARAM是整个系统的控制单元,同时为SBE 9PLUS CTD单元和SBE32采水器提供电源。通过系统程序,可以将数据采样间隔预先输入到SEARAM中,因此可实现数据采集、存储的自动化。
图1为SBE 917Plus CTD剖面仪在海上调查中的布放过程示意图,其布放过程可概括为以下7个步骤:安装调试、参数设置、设备布放、下降过程中测量、上升过程中采水、设备回收、数据下载及处理[9]。
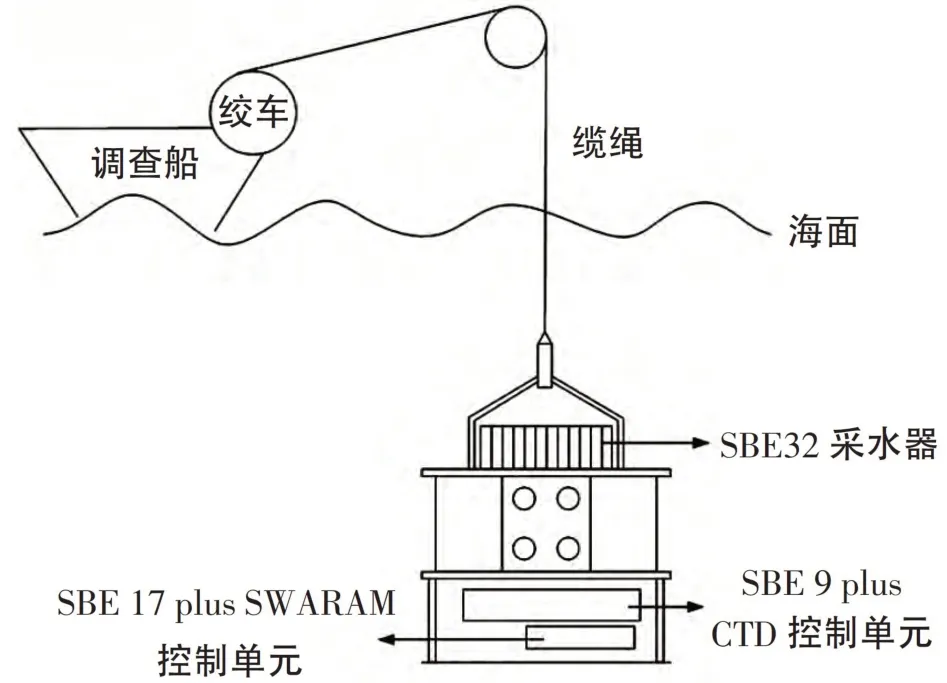
图1 SBE 917Plus CTD剖面仪布放方式
1. 2 XCTD原理
XCTD是一种海水温盐剖面快速测量设备,可在下沉过程中测量海水的电导率和温度,并根据下沉时间和速度计算出深度,其最大测量深度可达2 000 m。
XCTD测量系统一般由发射装置、抛弃式探头、数据接收装置和数据处理系统组成。其中,发射装置和抛弃式探头结构如图2所示。
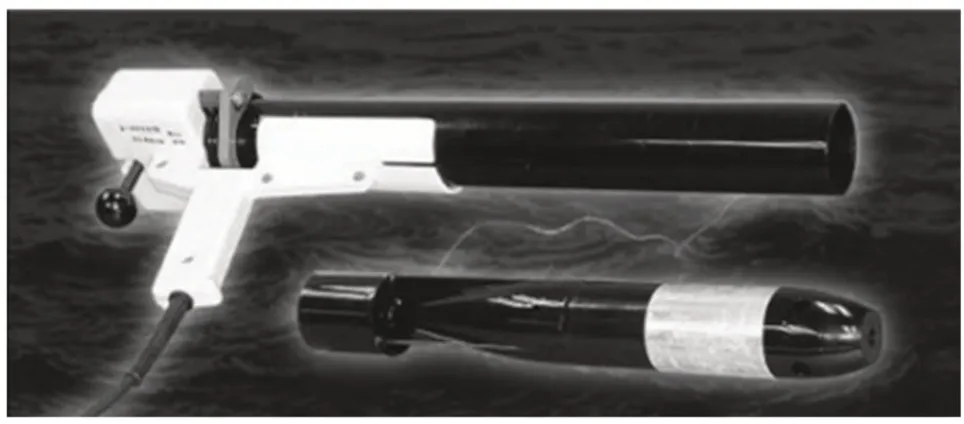
图2 XCTD发射装置与抛弃式探头
抛弃式探头是测量系统的核心,其中搭载的温度和电导率传感器可在探头的下沉过程中测量海水的温度、盐度数据。因为XCTD没有搭载压力传感器,故深度参数需要通过探头的下沉速度计算获得。
发射装置不仅用于发射探头,还要作为水下探头和水上数据接收装置之间完成数据通信的辅助结构。在探头脱离发射装置时,探头和发射装置中的传输导线线轴同时释放高强度细导线,用于实现传感器测量结果的数据传输。
数据接收装置和数据处理系统的主要功能是接收水下探头传回的温度和电导率数据,并计算盐度、声速等相应参数;检测探头入水信号,并根据入水时间和下沉速度计算剖面深度;实时记录并显示温度、电导率和声速剖面数据随深度变化的特性曲线。
XCTD测量系统工作方式如图3所示:抛弃式探头由发射装置发射入水,入水后即开始测量海水的温度和电导率。在下沉过程中,测量数据经探头内的高强度细导线传输至水上数据接收装置,进行数据预处理。数据处理软件检测探头入水时间,计算其入水深度,并对温度和电导率数据进行平滑和修正处理。获得最终的温盐深剖面数据[9-11]。其中,日本TSK公司生产的XCTD在世界处于领先水平,其不同型号的XCTD性能指标见表1。

图3 XCTD工作示意图
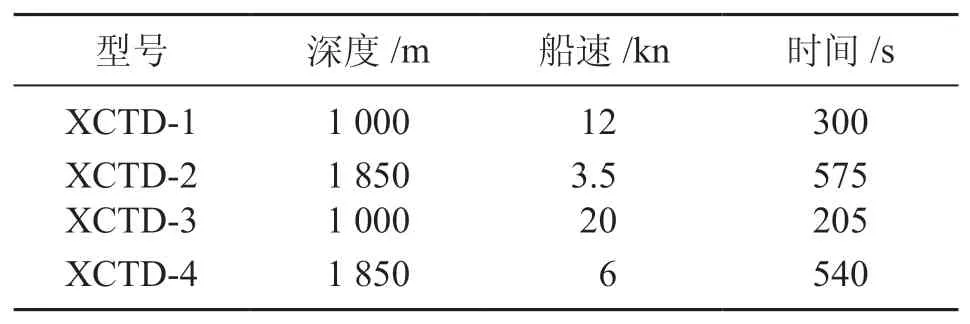
表1 日本TSK公司不同型号XCTD指标
2 数据来源与处理
2. 1 数据来源
本文采用 “海洋地质六号”调查船2019年3月在西太平洋某海域实测的数据。直接声速剖面测量采用的仪器为AML公司的PLUS SV声速剖面仪,最大工作深度6 000 m。间接声速剖面测量采用的仪器为海鸟公司生产的SBE 917 plus CTD和日本TSK公司生产的XCTD-4。在到达站位时,首先停船,使用钢缆绞车同时搭载了一套AML声速剖面仪和Seabird SBE 917 Plus CTD,同时投放回收,共耗时约5 h,分别获得两个声速剖面数据文件SVP-AML和SVP-CTD。然后,调查船以5 kn船速匀速向前航行,在航行的过程中投放XCTD,探头下降深度达1 850 m时,连接抛弃式探头与发射装置之间的数据传输导线断裂,测量结束,得到一个声速剖面数据文件SVP-XCTD,此过程共耗时约10 min。图4为MK-150采集软件查看原始采集数据。如图4所示。
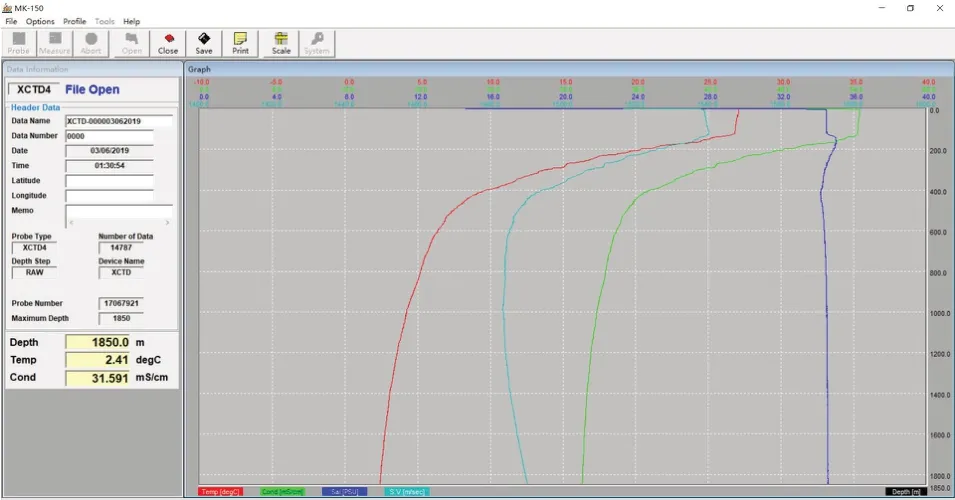
图4 MK-150采集软件查看XCTD原始数据
2. 2 数据处理
根据观测得到的原始声速剖面数据,绘制AML PLUS SV声速剖面仪、温盐深剖面仪和抛弃式温盐深剖面仪的声速剖面图,如图5所示。
为了进一步对比SVP-XCTD、SVP-CTD与SVP-AML之间的差异性大小,分别对3个声速剖面按深度间隔1 m取一个样。然后在对应同一深度处,分别计算SVP-XCTD与SVP-CTD、SVPXCTD与SVP-AML、SVP-CTD与SVP-AML之间的互差大小。由于误差的影响,采集的声速剖面数据可能存在尖峰效应,即某一时刻的测量值偏离实际值较大,为了剔除误差导致的测量异常值,采用中值平均滤波法对声速剖面互差数据进行滤波处理,可有效的剔除异常值及平滑声速剖面互差曲线,结果见图6。最后,分别统计每组互差值的最大值、最小值、均值以及标准差(表2)。
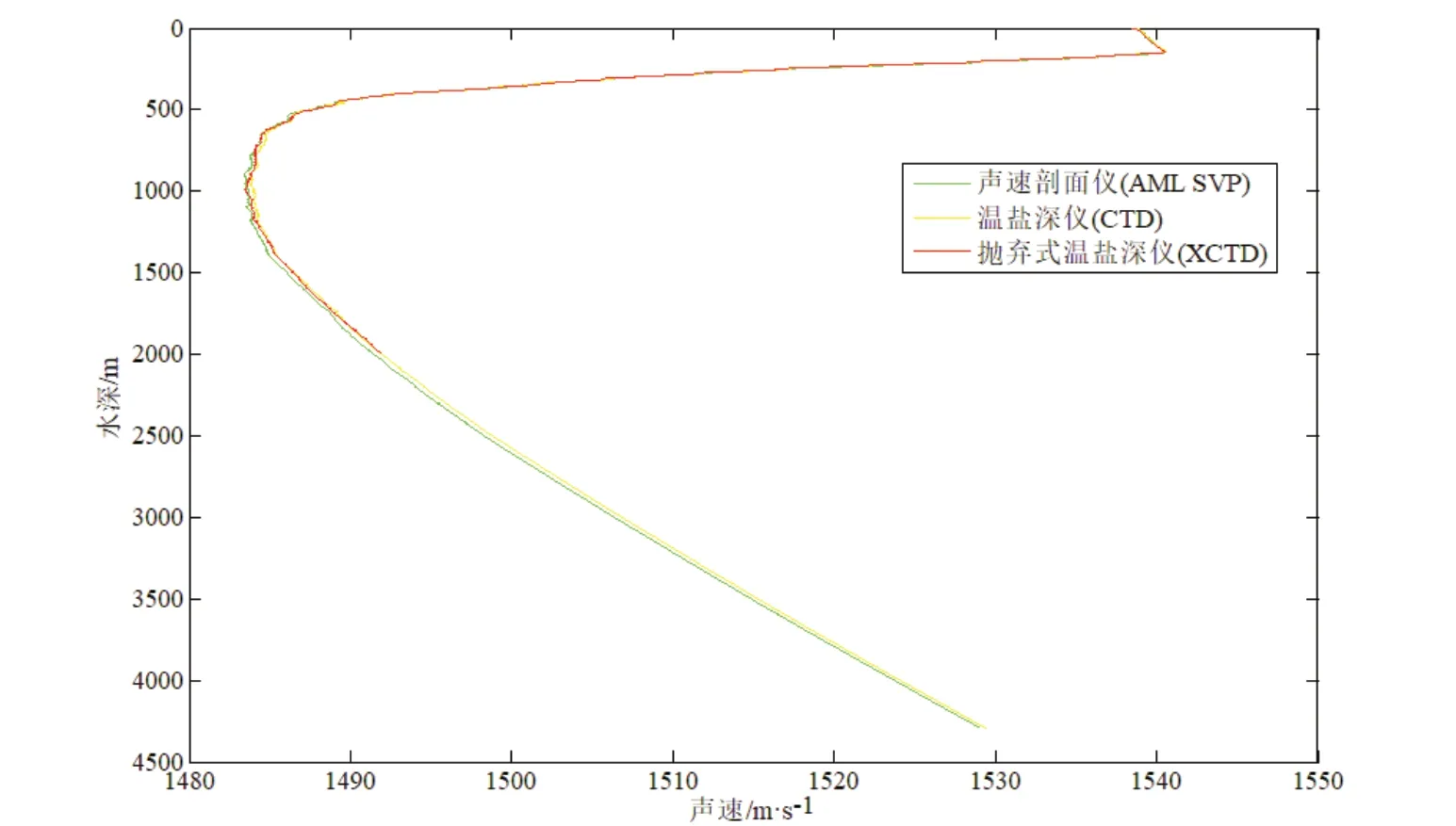
图5 AML声速剖面仪、温盐深仪与抛弃式温盐深仪获得的声速剖面

图6 SVP-XCTD与SVP-AML、SVP-XCTD与SVP-CTD、SVP-CTD与SVP-AML互差

表2 XCTD与AML、XCTD与CTD、CTD与AML之间的声速互差统计
3 结果与讨论
3. 1 不同声速剖面间互差对水深测量的影响
从图6中可以看出,SVP-XCTD与SVP-CTD的互差值总体较小,在200 m深度附近处,互差波动较大,200 m深度以下,互差趋于稳定。统计分析结果表明:最大值0.56,最小值-0.66,平均值-0.10,标准差0.15(表2)。SVP-XCTD与SVP-AML的互差最大值0.91,最小值-0.66,均值-0.18,标准差0.27(表2)。SVP-CTD与SVP-AML的互差最大值0.88,最小值-0.52,均值-0.36,标准差0.19(表2)。虽然对声速互差值进行了中值平均滤波,但是从图6中仍可以看出,在深度180~300 m之间,XCTD、CTD与AML的声速互差值仍存在一些的异常值,导致声速互差曲线跳动较为明显。结合图5中三者的声速剖面,深度约200 m附近正好位于声速跃层界面。单独提取XCTD与CTD的温度与盐度数据,绘制温度、盐度随深度变化的响应曲线(图7),在深度约200 m附近,同样也是温度与盐度变化较大的跃层界面。因此,推测这些互差值异常可能是在温度、盐度的跃层内,不同设备传感器的响应时间不同、深度计算公式的误差或传感器本身的测量误差引起的。在深度约300 m以下,三者的互差值趋于稳定。其中,SVP-CTD与SVP-AML的互差值无明显波动。而SVP-XCTD与SVP-AML、SVP-XCTD与SVP-CTD在深度约200 m以下,互差值在-0.7~1 m/s之间呈不规则的曲线波动。
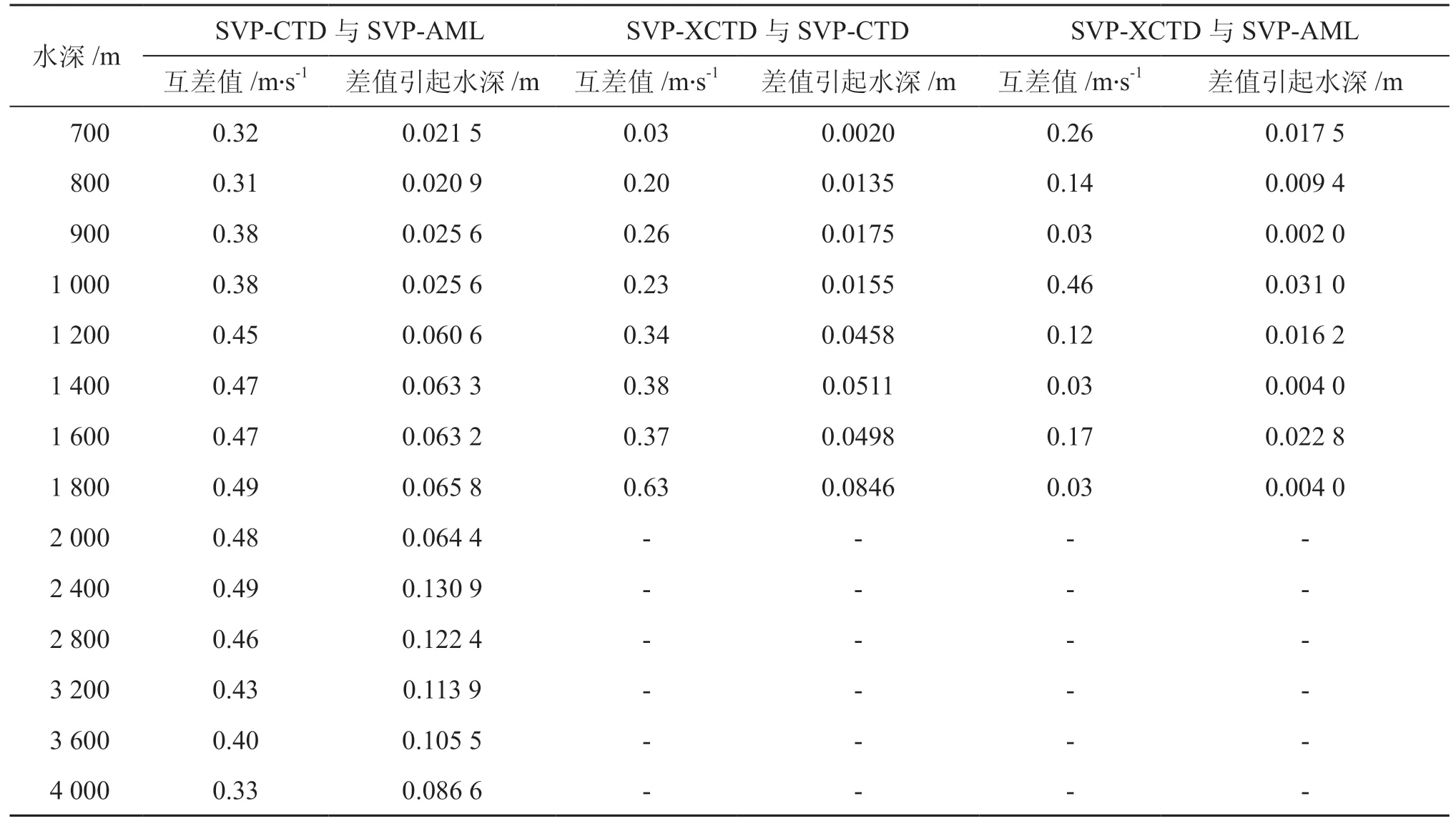
为了确定CTD和XCTD观测得到的声速剖面与声速剖面仪获得的声速剖面之间的差值对水深测量的影响,首先对水深进行分层,浅水区由于声速变化较大,分层间隔50 m、100 m,深水区声速呈线性变化,分层间隔200 m、400 m,然后利用每层的水深值除以声速剖面仪在该层底界面获得的声速,得到声波在该水深层传播时间,利用该传播时间乘以声速互差值,最终得到该水深层声速互差值引起水深误差(表3)。从表中可以看出,在2 400 m水深层,差值引起的水深变化最大为0.130 9 m。在多波束水深测量过程中,声速剖面的分层远小于400 m,该差值对水深测量结果的影响可忽略不计,使用XCTD与CTD获得的声速剖面数据完全满足水深调查的要求。
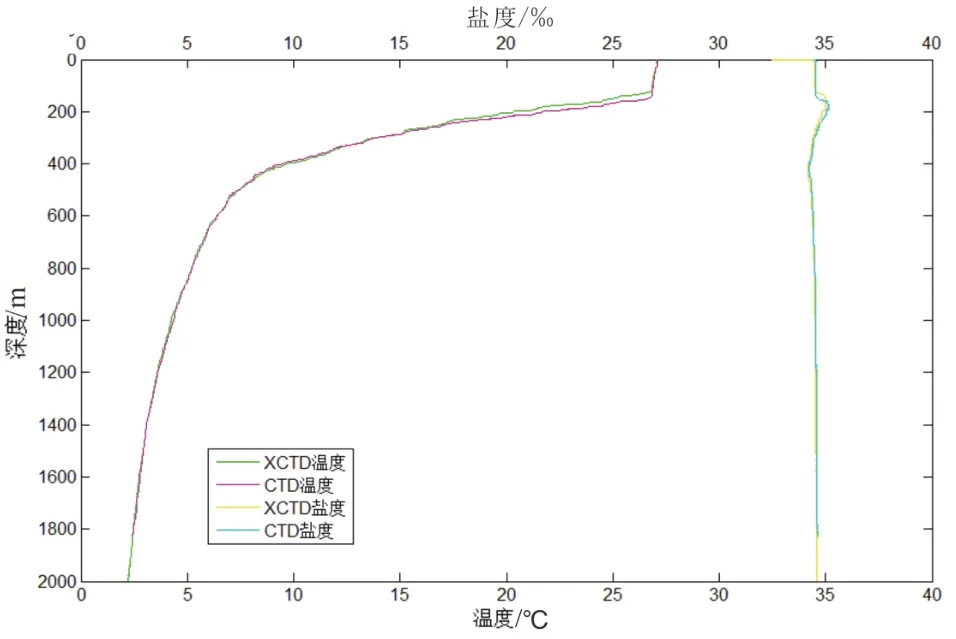
图7 XCTD与CTD温度、盐度随深度变化的响应的曲线

表3 不同声速剖面间互差对水深测量的影响
续表3
3. 2 CTD与XCTD在多波束水深测量中的应用
目前,在多波束水深测量过程中,多使用声速剖面仪直接观测声速剖面。测量时需要停船,然后通过绞车投放声速剖面仪。在远海,水深多达6 000 m左右,投放回收一次约5 h,耗费船时较多。同时,海洋调查规范要求,在1°×1°范围内至少应有3个全海深的声速剖面,而当声速剖面变化较大时,还需要进行补测,这往往需要耗费大量宝贵的船时。同时,海上调查作业大多是一个综合性的作业过程,不仅仅包括多波束水深调查,往往还包括海洋地球物理调查(海洋重力、磁力调查)以及海洋水文调查(CTD、ADCP调查)等。
根据CTD与XCTD的特点,CTD的测量深度最大可达10 000 m,满足全海深测量要求,进行全海深的声速剖面测量时,可考虑使用CTD进行测量。但是CTD的缺点是需要停船进行测量,耗费时间较长,水深2 000 m时测量一次声速剖面数据大约需要100 min。XCTD的测量深度最大只有2 000 m,比CTD的测量深度要小许多。但是XCTD的优点是不需要停船即可进行声速剖面的测量,水深2 000 m时只需10 min的时间即可完成一次声速剖面的测量。
在海上调查作业过程中,为了节约船时,可以考虑在含有CTD调查的航次中,在满足设计要求的基础上,通过合理布设CTD站位,使用CTD代替声速剖面仪间接测量声速剖面,以减少声速剖面仪投放次数。由于XCTD具有不用停船、作业时间短、效率高的优点,但是其测量深度最大为2 000 m,所以,在多波束水深调查过程中,当声速剖面变化较大,需要补充声速剖面测量时,可在非停船作业状态下通过投放XCTD间接测量获得声速剖面数据。
4 结 论
通过对XCTD、CTD和声速计获取的声速数据进行对比分析,得出以下结论:
(1)不同声速剖面间互差引起的水深变化最大为0.130 9 m。该差值对水深测量结果的影响可忽略不计,使用XCTD与CTD获得的声速剖面数据完全满足水深调查的要求;(2)在海上多波束水深调查作业过程中,当有CTD调查作业时,可通过合理布设CTD站位,使用CTD间接测量得到的声速剖面代替声速剖面仪直接测量得到的声速剖面;当需要补充声速剖面测量时,在非停船作业状态下投放XCTD间接测量声速剖面,可提高海上多波束水深调查作业的效率。
