基于DEM-MBD耦合预破土组合深松铲仿真研究
2021-06-22孔羿勋杨丹彤王曦成周士琳张祺睿邓敏刘园杰郑丁科
孔羿勋 杨丹彤 王曦成 周士琳 张祺睿 邓敏 刘园杰 郑丁科
摘要 为了研究在振动深松条件下深松铲预破土对深松碎土的作用效果,利用DEM-MBD耦合技术对振动深松时深松铲和土壤颗粒之间的相互作用进行模拟研究。在试验台模型及连接不改变的条件下,探讨不同破土器半径大小以及安装位置与土壤颗粒的扰动情况,采用土壤扰动云图和运动副采集力来量化深松效果。仿真试验结果表明,在振幅振频条件相同、前进速度0.4 m/s时,破土器圆内弧半径150 mm,安装位置在3号组位的土壤扰动较好,深松效果较好;带有圆弧形破土器的深松铲对深松减阻具有显著作用,可以减少耕作阻力。该研究对研制结构简单、深松减阻高效的深松机具设备提供了理论依据,也为不同土质深松作业研究提供了一种有效的计算方法。
關键词 土壤深松;振动深松铲;预破土;仿真试验
中图分类号 S22 文献标识码 A
文章编号 0517-6611(2021)09-0192-04
doi:10.3969/j.issn.0517-6611.2021.09.053
Abstract In order to study the pre-ripper effect of subsoiler on subsoiling broken soil under the conditions of vibration subsoiling,the interaction between subsoiler and soil particles during vibration subsoiling was simulated by using DEM-MBD coupling technology.Under the condition that the model and connection of the test-bed were not changed,the disturbance of different radius of pre-ripper,installation position and soil particles was discussed.The effect of subsoiling was quantified by soil disturbance nephogram and collection force of moving pair.The simulation test results showed that,under the conditions of the same amplitude and frequency,forward speed 0.4 m/s ,the soil disturbance was better when the inner arc radius of pre-ripper was 150 mm and the installation position was in No.3,the monitoring force was small,and the subsoiling effect was good.The subsoiler with pre-ripper had a significant effect on subsoiling and reducing resistance,which could reduce tillage resistance.This study provided a theoretical basis for the development of subsoiling machines and equipment with simple structure and high drag reduction efficiency,and also provided an effective calculation method for the study of subsoiling operations with different soil properties.
Key words Soil subsoiling;Vibrating subsoiler;Soil pre-ripping;Simulation test
利用深松技术可以打破因长时间耕作产生的土壤犁底层,提高土壤的蓄水保墒能力,进一步提高农作物抗倒伏能力和粮食产量[1-7]。但是,土壤深松过程中存在耕作阻力大、拖拉机油耗高、深松效率不高等问题[8-9],这些问题制约着土壤深松技术的发展,使得土壤深松很难取得突破性成就[10-13]。笔者在现有深松铲的基础上加装预破土器,实现铲臂触土前先对土壤进行预切,从而有效减少深松阻力。
1 振动深松试验台仿真模型及预破土机理
1.1 振动深松试验台仿真模型
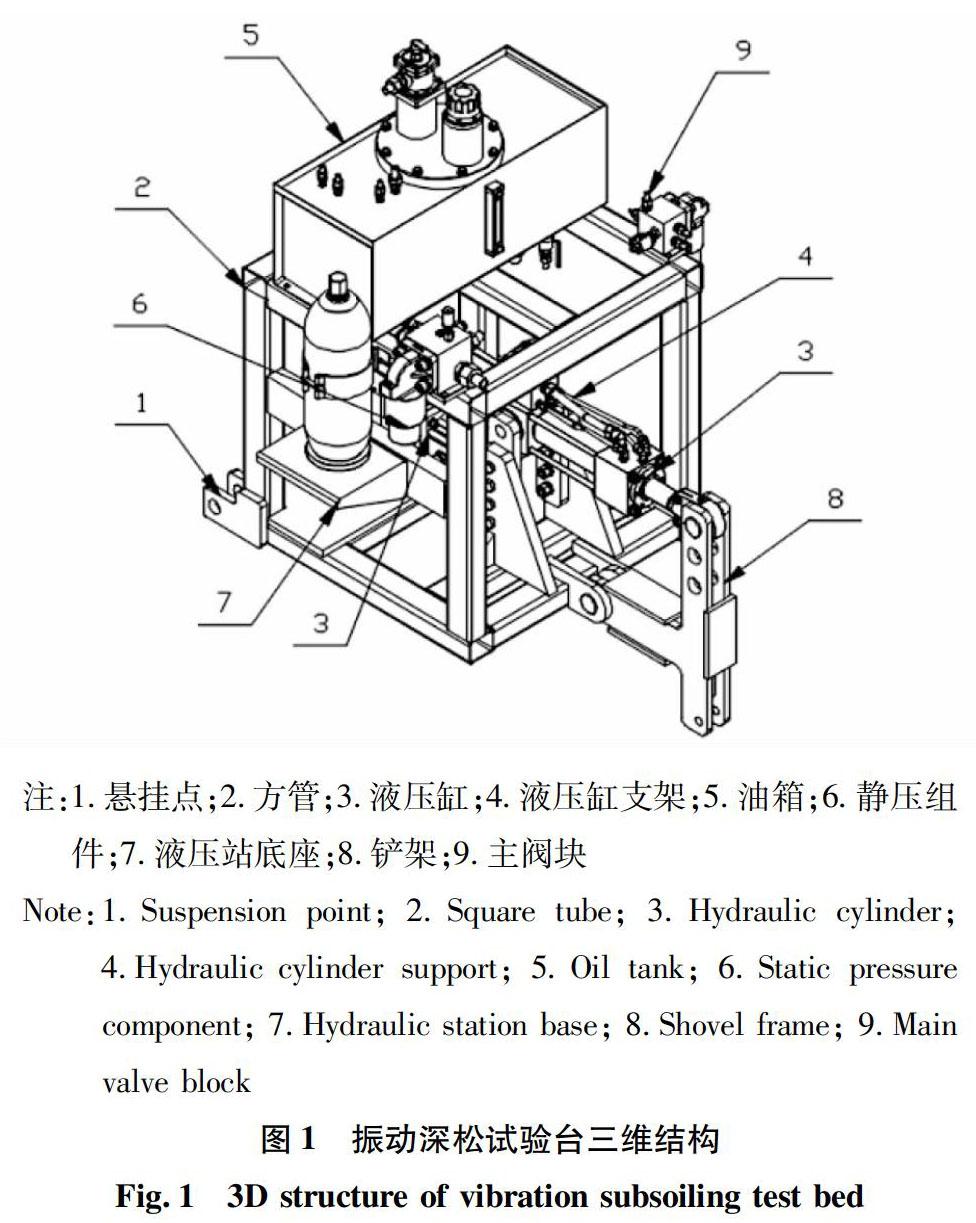
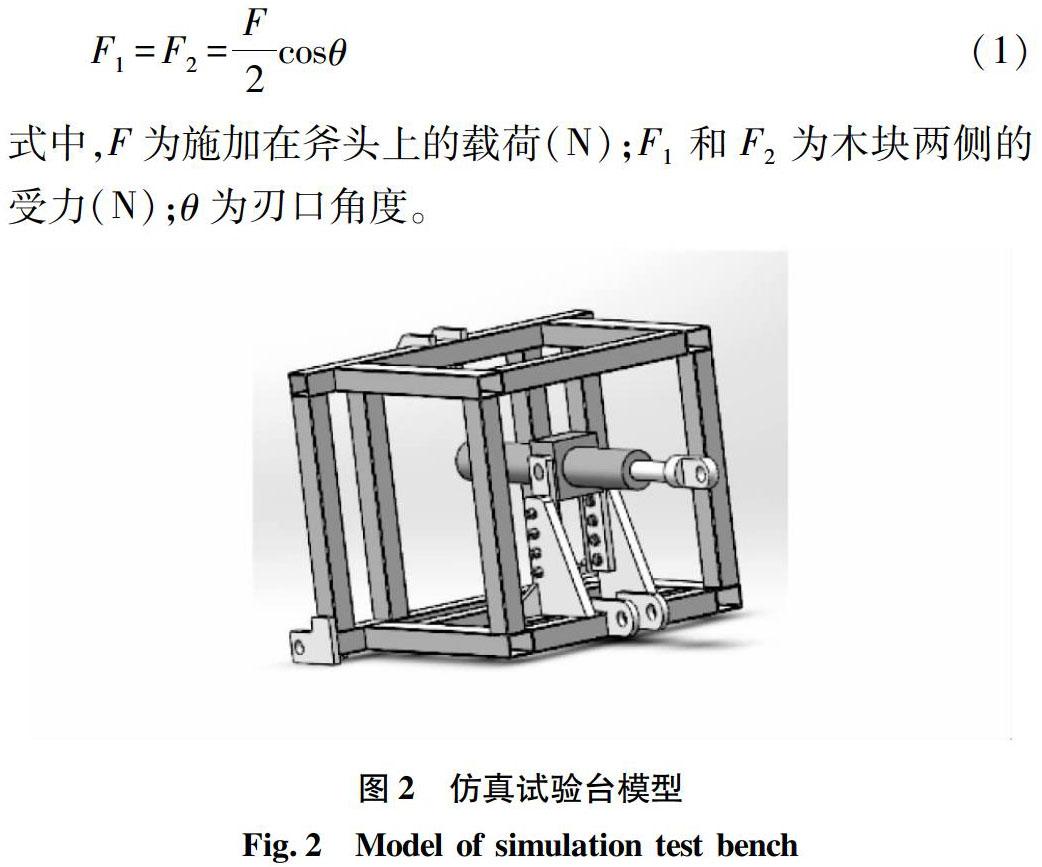
振动深松是指使用专用的土壤振动深松机具尽可能不破坏土壤表层土壤,对土壤深处进行机械化深松作业。振动深松又分为自激振动和受迫振动,受迫振动可以很好地对土壤犁底层扰乱破碎[14]。图1为试验所用的可变频变幅振动深松试验台结构[15],试验台由三点悬挂、机架、减速箱、双联齿轮泵、油箱组件、储能器组件、伺服液压油缸组件、铲架、静压组件、主阀块组成。试验台通过三点悬挂可以悬挂到土槽车或拖拉机上,可以实现变频变幅的振动深松作业。据此对试验台进行简化,即深松仿真试验台模型(图2)。
1.2 预破土机理
陈海云[13]设计了一种在五铧犁机架前装加破土器的挖木薯机,来提高挖薯效率。郑侃等[14]设计了折线破土器深松铲,有效降低了犁底层的容重和紧实度。预破土是指深松过程中在深松铲铲臂未接触到土壤犁底层之前先由破土器作用在土层上,对土层进行切削划破,尽可能减少铲臂直接与犁底层接触,来降低深松过程中的耕作阻力,犹如斧头劈柴时斧头刃口将力施加在木块上,产生力F,由于木块两侧会挤压预制斧头切入,产生2个力F1和F2,其受力如图3所示。通过受力分析得到:
式中,F为施加在斧头上的载荷(N);F1和F2为木块两侧的受力(N);θ为刃口角度。
刃口角度越小,斧头劈开柴的能力越强,越省力。利用这一机理,笔者设计了一款合适的破土器,并确定其在深松铲铲臂上的最佳安装位置,利用其预先切开坚硬的土层,减少铲臂与土层之间的接触阻力,在振动力的作用下铲臂将破土器切开的土层缝隙进一步扩大,加大深松铲对土壤的抬升扰动,完成振动深松作业。
2 预破土组合深松铲的设计
2.1 破土器设计
由斧头劈柴类比破土器深松预破土可知,刃口角越小,越有利于切开犁底层,但由于土壤内部机械结构复杂,刃口角小虽然可以大大减小深松阻力,但会使破土器刃口耐磨性变差,容易卷刃,反而会增加耕作阻力。因此,笔者采用刃口角为60°,设计圆弧形深松预破土器,圆弧形结构可以在外力作用下产生一定的弹性变形,有利于保护深松铲臂。该破土器由开有刃口的圆弧形破土刀片和连接耳片焊接而成。在连接耳片上打一个直径17.5 mm的通孔,可以通过螺栓与铲臂相连。为了确定预破土器的圆弧形结构,设计了3种不同弧形的预破土器,a型圆弧形破土器半径内弧为150 mm,b型圆弧形破土器半径内弧为200 mm,c型圆弧形破土器半径内弧为250 mm,如图4所示。3种破土器均可由连接螺栓装配到深松铲铲臂上。
2.2 预破土组合深松铲的设计 深松铲采用凿形带翼铲柱式结构,材料为65Mn弹簧钢。铲臂采用上直下曲的外形结构,顶部开有直径23 mm的通孔,用于与深松铲螺栓组连接。铲尖由铲面和2个楔形垫块焊接组成。铲翼由钢板焊接而成,侧面开有刃口,便于划切土壤,翼面下焊接有支撑块,用于提高强度。然后,用螺栓与铲臂相连,保证翼面与水平面的夹角为60°。分布于铲臂两侧,两翼侧边组成60°夹角。铲臂内侧有直径17.5 mm的6个通孔,组成3组不同高度的破土器安装位置(1、2、3号)。图5为新型设计的预破土组合深松铲。
2.3 预破土组合深松铲受力安全性分析
将建立好的预破土组合深松铲几何模型导入到ANSYS workbench 18.0中,设置深松铲材料为65Mn弹簧钢,并在MESHINNG模块下对几何模型进行网格划分,根据所测土壤坚实度,在深松铲上施加载荷,结果另存为x-t文件,然后导入到ANSYS Workbench中进行静力学分析。65Mn弹簧钢的材料性质如下:剪切模量7.9×1010 MPa,泊松比0.3,密度7 865 kg/m3。根据测得的土壤坚实度,在铲尖垂直于铲尖面中心处施加20 MPa大小的力,在圆弧破土器半径中点处添加一个水平方向10 MPa大小的力,然后定义各个零部件之间的约束,设置铲的应力、应变和安全因子等求解项目,得到深松铲的应力云图(图6)。由图6可知,深松铲设计可满足要求。
3 仿真模型的建立
3.1 土壤模型 根据《土工试验规程》对试验地块土壤的基本物理参数进行测量,得出试验地块土壤质地为黏土。测得土壤耕作层、犁底层和心层的含水率分别为31.253%、40.370% 和63.626%,坚实度分别为3.594~8.316、8.316~18.500和23.983~34.960 MPa,堆积角分别为28.0°、27.5°和29.0°;查材料手册得到土壤的泊松比分别为0.25、0.30和0.35;密度分別为1.15、1.55和1.81 g/cm3。然后,在EDEM2018中建立土壤颗粒床单元来模拟出试验地块的土壤,如图7所示。
3.2 装配模型图 将预破土组合深松铲和拖拉机的3D模型在SolidWorks中装配好,并另存为x-t格式,以用于耦合仿真试验,如图8所示。
4 DEM-MBD耦合仿真试验
4.1 试验目的 该试验目的是为了在田间试验前先进行仿真试验,来降低田间试验成本,提高研发效率,进一步找出新设计深松铲的最佳破土器半径规格以及最适宜深松的安装组合位置。
4.2 试验方法 将3种类型的破土器分别安装在深松铲的1、2、3号安装位置进行振动深松仿真试验,振动时深松铲的激振油缸振幅为5 mm、振频为10 Hz,拖拉机前进速度为0.4 m/s。
在耕作过程中,土壤颗粒会对深松铲进行刃磨,且颗粒会黏接在深松铲上,深松铲受力不集中,颗粒组成的粒团运动轨迹比较复杂。因此,采用DEM-MBD耦合的方式,通过仿真试验分析土壤粒团颗粒与深松铲的扰动情况及仿真过程中深松铲安装机架和油缸接头处水平受力情况。
4.3 试验过程 在Recurdyn中导入Solidworks,另存为x-t格式的仿真模型文件,设置重力方向为-z,将深松铲进场merge合并,定义好约束后,在简化的振动油缸和油缸接管施加一个圆柱移动副,然后在振动深松试验台模型的套筒导管圆柱移动副上施加一个振动函数F:
式中,F为激励,单位为mm;pi为圆周率,即π;time为时间,单位为s;A为振幅,单位为mm;B为振频,单位为Hz。
然后,再在整个模型上施加一个0.4 m/s的前进速度,将深松铲用wall工具选取并生成wall1文件,将wall1文件输出到仿真文件夹下。设置好Edem前处理后,在仿真面板内设置瑞利时间步长为20%,设置Recurdyn仿真时间步为50 s,总仿真时间为2 500 s,点击仿真,Recurdyn仿真开始后会自动开启Edem窗口的仿真分析,待仿真结束进行后处理,如图9所示。
4.4 仿真结果与分析
4.4.1 土壤扰动情况。
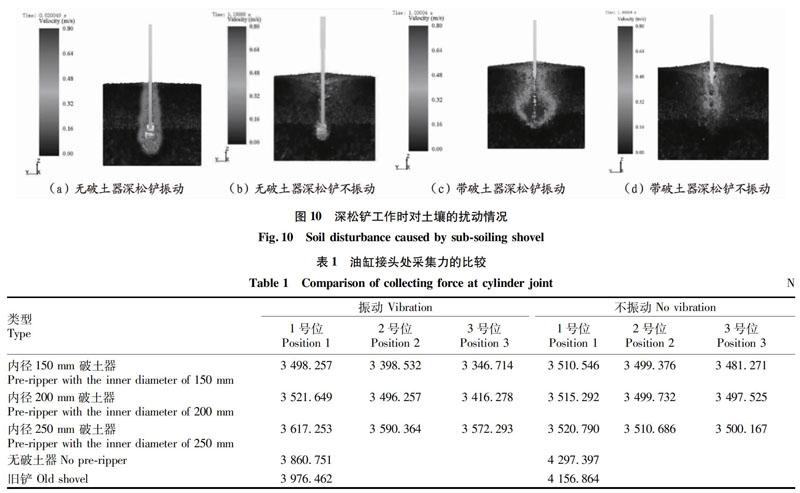
通过EDEM2018的后处理模块,开始观察土壤颗粒在破土深松仿真过程中形成的扰动状况,如图10所示。从图10可以看出,土壤颗粒在破土深松仿真过程中土壤扰动明显,破土器有利于土壤的深松,振动条件下碎土效果较好,地表隆起明显。
4.4.2 深松阻力。
在RecueDyn的仿真结果中,从油缸接头处旋转副上提取出每次仿真的水平力,结果如表1所示。振动条件下得到新铲,装有破土器且破土器半径为1 500 mm,在3号组合位置时油缸采集力最小为3 346.714 N;该位置组合方式不振动条件下采集力也最小,为3 481.271 N;拆除破土器后振动条件下采集力为3 860.751 N;拆除破土器后不振动条件下采集力为 4 297.397 N;破土器半径150 mm的3号位振动比无破土器振动最大减阻13.314%,比无破土器不振动最大减阻22.122%(表1)。
数据分析表明,振动条件下油缸接头受到的力明显比不振动深松的小,带破土器深松铲比无破土器深松铲的阻力小。
5 结论
通過离散元分析软件EDEM 2018,建立了土壤仿真模型,采用多体动力学分析软件RecueDyn V9R1对SolidWorks建立的深松试验台模型进行约束和运动设置,然后进行耦合仿真分析。结果表明,圆弧半径为150 mm的破土器在振动条件下力最小,并且同一圆弧半径相比较下安装位置在3号组合位置时采集力最小。比较有无破土器的2种情况在相同振动条件下的深松铲受力结果,发现带破土器深松铲比无破土器深松铲的阻力小。
参考文献
[1] 李霞,张东兴,张瑞,等.土壤物理特性对深松阻力影响的试验[J].江苏大学学报(自然科学版),2014,35(1):34-39.
[2] 西涅阿科夫 Г Н,潘诺夫 И М.土壤耕作机械的理论和计算[M].李清桂,等译.北京:中国农业机械出版社,1981:66.
[3] 吉尔 W R,范德伯奇G E.耕作和牵引土壤动力学[M].耕作与牵引土壤动力学翻译组,译.北京:中国农业机械出版社,1981:264.
[4] KASISIRA L L,DU PLESSIS H L M.Energy optimization for subsoilers in tandem in a sandy clay loam soil[J].Soil and tillage research,2006,86 (2):185-198.
[5] 甄文斌,杨丹彤,黄世醒.带翼深松铲的试验研究[J].农机化研究,2011,33(8):119-122.
[6] 徐宗保,董欣,李紫辉,等.振动式深松中耕作业机的研制与试验研究[J].农机化研究,2010,32(1):182-184.
[7] 袁军,王景立.深松技术与深松机具发展现状[J].安徽农业科学,2014,42(33):11978-11979,12008.
[8] 赵新,罗锡文,WELLS L G.土壤阻力连续测试设备研制[J].农业工程学报,2009,25(2):67-71.
[9] 甄文斌,杨丹彤,黄世醒,等.土壤耕作阻力测试系统研制及标定[J].农机化研究,2011,33(7):104-107.
[10] 盛文溢,曾庆猛,林剑辉,等.大田尺度下车载式土壤多参数测量方法研究[J].农业机械学报,2010,41(11):188-192.
[11] 罗锡文,PERUMPRAL J V.利用微波反射效应测定土壤强度的研究[J].农业工程学报,1995,11(1):46-51.
[12] 韦钟继,郑丁科,杨丹彤,等.带翼振动深松铲运动特性分析及试验研究[J].农机化研究,2017,39(12):32-37.
[13] 陈海云.挖木薯用机器[J].中国农垦,1959(24):27.
[14] 郑侃,何进,李洪文,等.基于离散元深松土壤模型的折线破土刃深松铲研究[J].农业机械学报,2016,47(9):62-72.
[15] 赵闯,韦钟继,孔羿勋,等.变频变幅振动深松试验台的设计与试验[J].农机化研究,2020,42(11):168-172.
