双电机串并联混动系统性能仿真分析
2021-06-22虞卫飞杜成磊代永刚李杰
虞卫飞,杜成磊,代永刚,李杰
安徽江淮汽车集团股份有限公司,安徽 合肥 230022
0 引言
1997年丰田汽车首次推出搭载第一代丰田混合动力系统(Toyota hybrid system,THS)的混动汽车Prius[1],至2016年推出第四代THS混动系统,系统综合效率逐步提升。本田、三菱、上汽、比亚迪等企业也相继推出不同混动技术方案的量产车型[2-6]。近几年随着新能源汽车快速发展,电机、电控系统、电池的效率和功率密度大幅提升而成本大幅下降,推动混动汽车总成尺寸减小、节油效果提升,与传统燃油车成本差距逐年缩小。2020年10月27日《节能与新能源汽车技术路线图2.0》发布,明确了混动汽车的主要目标,2025年混动新车占传统能源乘用车的50%以上,至2035年混动新车占传统能源乘用车的100%[7]。日益严格的汽车油耗标准与“双积分”政策必将持续推动混动技术发展和混动汽车市场占有率的上升。

图2 双电机串并联混动模式状态机
目前乘用车主流混动技术路线大致可分为传统变速箱与单电机、混动专用变速箱和双电机、双电机增程3类[8],高端车型由于动力需求可能会增加1~2个电机(electric motor,EM)用于后驱[9]。电机可布置在发动机前端、发动机后端、离合器后、变速箱输入轴4、变速箱输出轴、后桥等位置,其中布置在变速箱输入轴时需对传统变速箱进行改造,使电机和发动机有更多的挡位组合。单电机混动模式一般有纯电驱动、并联驱动、发动机直驱、怠速发电和能量回收[10-11];双电机混动增加串联模式可以较大地改善小功率下的经济性。由于在中高速巡航时不能进行发动机直驱,双电机增程综合效率比双电机串并联混动略低。
1 双电机串并联混动系统结构参数
在某紧凑运动型多用途汽车(sport utility vehicle,SUV)上匹配双电机串并联混动系统,基于Matlab/Simulink进行混动系统仿真研究。该车轴距为2640 mm,整备质量为1580 kg,前置前驱。
1.1 混动系统结构与参数
混动系统部件结构示意如图1所示,发电机(generator motor,GM)经齿轮与发动机直连,驱动电机减速后与驱动轴直连,发动机与驱动轴之间安装一个常开式离合器。离合器断开时,发动机不参与驱动车辆;离合器闭合时,发动机参与驱动车辆。由于没有倒挡换向齿轮,因此发动机不能直驱倒车。

图1 双电机串并联混合动力部件结构示意图
发电机、驱动电机及混合动力电动汽车(hybrid electric vehicle,HEV)混动专用变速箱速比参数见表1,HEV动力电池参数见表2,该电池不支持外接充电。

表1 电机和变速箱参数

表2 动力电池参数
1.2 发动机参数
双电机串并联混动车辆动力主要依靠驱动电机提供,因此其对发动机功率、扭矩要求比传统燃油车低,为提高系统综合效率,匹配1.5T GDI直列四缸阿特金森循环汽油机,该发动机压缩比较高、热效率较高,发动机主要技术参数如表3所示。

表3 发动机主要技术参数
2 双电机串并联混动系统控制策略
开发双电机混动控制策略,包括纯电驱动、串联驱动、发动机直驱等混动模式,为稳态模式。离合器开、闭和发动机起、停控制为4种过渡工况,通过条件判断和状态机管理实现不同工况之间切换,双电机串并联混动模式状态机如图2所示。
2.1 纯电驱动
混动系统上电后默认进入纯电驱动模式,若电池电量及电池可用放电功率满足车辆驱动功率和车辆用电负载功率需求,则继续处于该模式;若电池电量或电池可用功率不满足条件,则需起动发动机进入串联模式。
2.2 发动机起动和停机
纯电模式到串联模式的条件满足时则进入发动机起动模式,起动成功则进入串联模式,否则退回纯电模式。发动机起动依靠发电机反拖发动机到目标转速再执行喷油点火,该过程比传统起动机起动更快速、平稳,排放更低。通过切断发动机喷油和发电机输出负扭矩,实现发动机的快速停机。
2.3 串联驱动模式
车辆停车电量不足、纯电行驶功率不足、加速功率不足等工况下车辆均会进入串联驱动模式。串联模式下发动机不直接驱动车辆,因此可运行在最佳经济工况,提高中、低车速行驶时系统综合效率;急加速时发动机可以快速运行到高转速、大功率工况,通过驱动电机实现大功率迅速输出,且无动力中断,因此其动力性更强。
2.4 离合器闭合和打开
通过离合器打开和闭合实现串联和并联模式切换。为减少模式切换导致的车辆抖动,离合器关闭前由发动机与发电机协调控制离合器主动盘转速与从动盘转速一致,然后离合器闭合,离合器完全闭合后,通过扭矩分配控制发动机、发电机、驱动电机的扭矩。离合器打开时,通过发动机和发电机调整离合器主动盘端扭矩为0,然后打开离合器。
2.5 并联驱动模式
车辆稳定在中高车速巡航时,由于发电机和驱动电机的效率损失,串联模式不是最优,此时应进入并联模式,实现发动机直驱。此时发动机不一定在同功率最经济工况,但应在经济工况,系统综合效率最高。
根据动力性、经济性、各部件运行边界及各混动模式的工作特点,确定不同车辆行驶工况最佳工作模式区域划分如图3所示。在实际运行中,需综合考虑电池、电机和发动机状态及加减速意愿等,对实际混动模式适时调整。

图3 不同混动模式区域示意图
3 仿真模型建立及测试
3.1 建模
为检验双电机混动控制策略的准确性,基于Matlab/Simulink搭建被控对象仿真模型进行联合测试,仿真模型如图4所示。驾驶员模型负责全球轻型车统一测试循环(worldwide harmonized light vehicles test cycles,WLTC)测试或0~100 km/h加速时油门、制动等信号的调整和输入。被控对象模型包含发动机、发电机、驱动电机、动力电池、直流转换器(direct current-direct current converter,DCDC)、变速箱和车辆模型以及各模型之间接口。根据万有特性曲线中油耗数据建立发动机原始模型,然后辅以温度模型修正。动力电池根据电池内阻、电池等效电路模型及开路电压(open circuit voltage,OCV)-电池荷电状态(state of charge,SOC)曲线计算电池电压和荷电状态Qsoc,电机模型主要根据电机发电和驱动效率表计算,车辆模型根据汽车动力学原理[12-13]搭建。

图4 仿真模型
3.2 仿真测试结果与分析
基于Matlab/Simulink建立双电机串并联混动控制模型后,联合被控对象进行仿真测试,车速、SOC、WLTC测试结果如图5所示。由图5可知:低速、中速为纯电和串联模式之间切换,高速和超高速进入并联模式。循环初始时QSOC=35%,循环结束时QSOC=37%,QSOC增长2%。WLTC仿真油耗为6 L/(100 km)。计算可知电能差值小于燃油消耗能量的1%,根据文献[14]不需要对油耗结果进行修正。因此最终双电机串并联混动WLTC仿真油耗为6 L/(100 km),通过提升发动机热效率,能够进一步降低油耗。

图5 WLTC测试结果
0~100 km/h加速测试结果如图6所示。由图6可知:油门踏板全踩后,预估电池功率不足,快速启动发动机进入串联模式,发动机发电与电池共同驱动电机工作,受制于驱动轮附着力限制,车速由0加速到100 km/h的时间为9.1 s。
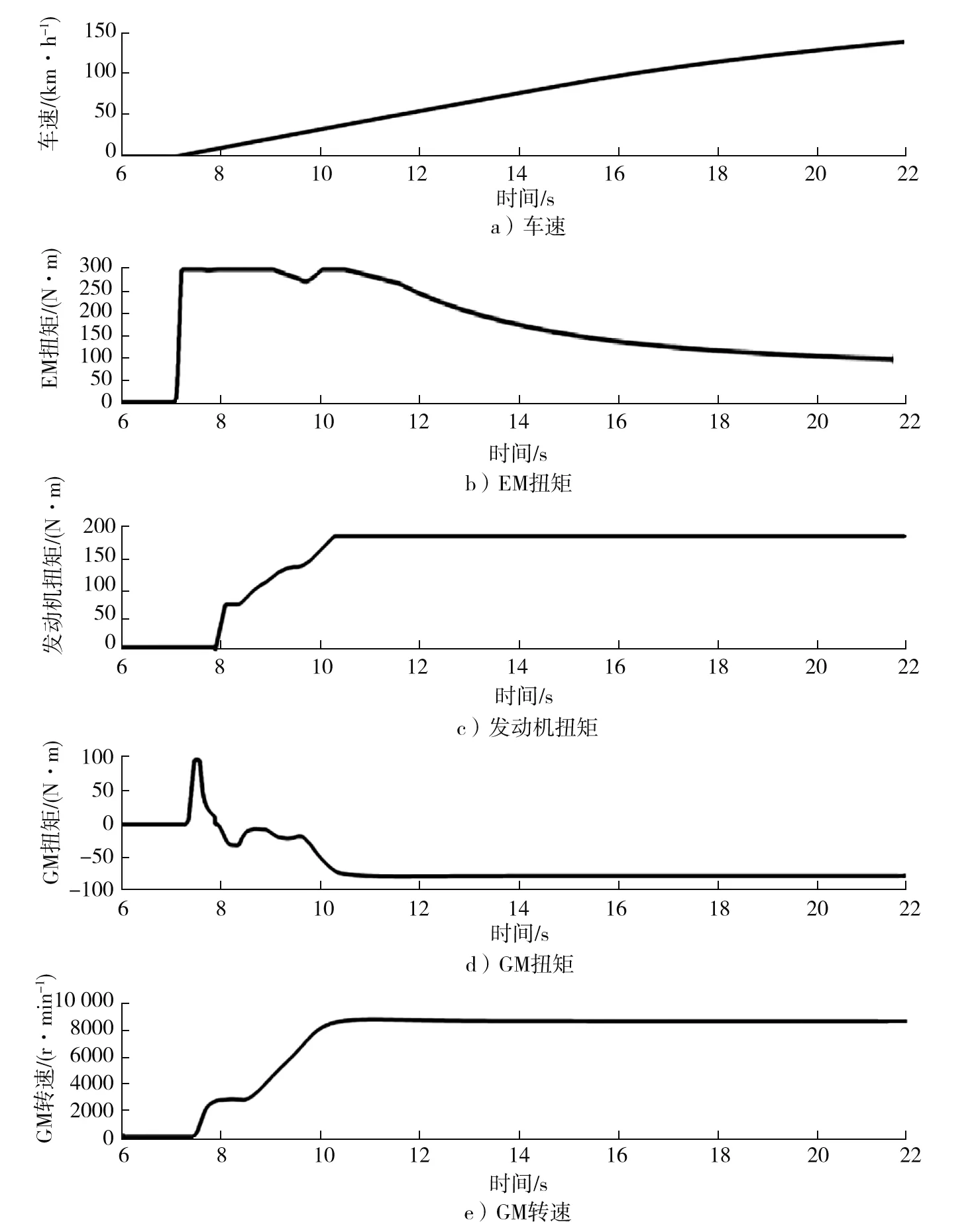
图6 0~100 km/h加速测试结果
4 结语
基于Matlab/Simulink开发双电机串并联混动控制系统,匹配某紧凑型SUV开发仿真测试模型。仿真计算表明,双电机配阿特金森循环发动机可实现电量平衡时WLTC仿真油耗为6 L/(100 km),0~100 km/h的加速时间为9.1 s,双电机串并联混动节油显著,动力性良好。
