基于模型预测的卡车节油驾驶控制策略
2021-06-22聂林同李军伟李兴坤姜世腾阚辉玉
聂林同,李军伟*,李兴坤,姜世腾,阚辉玉
1.山东理工大学 交通与车辆工程学院, 山东 淄博 255049;2.中寰卫星导航通信有限公司 青岛分公司,山东 青岛 266071
0 引言
近年来我国道路运输行业迅猛发展,重型卡车在道路运输中扮演了重要角色。据统计,目前我国轻中型卡车保有量超过1400万辆,重型卡车保有量超过500万辆,支撑起了万亿级别的公路物流市场[1]。重型货运卡车已成为推动我国经济发展的重要生产工具。胡金义等[2]分析指出,高排放标准下道路燃油车辆面临巨大的竞争及生存压力。节油效果好、智能化程度高是重型卡车行业发展的趋势,有关车辆节油驾驶策略方面的研究越来越受关注。有学者从优秀驾驶员的驾驶习惯入手,通过分析试验数据与驾驶员的操作经验来制定节油驾驶策略,Gao等[3]分析了驾驶重型卡车驾驶员在高速公路上的驾驶行为来确定驾驶行为对重型卡车燃油经济性的影响。有学者采用数值优化的方法,通过动态规划算法求解具有最小燃油消耗量的全局最优解,Peng等[4]利用动态规划算法来求解循环工况中的车辆发动机输出功率和变速箱挡位切换问题,寻找燃油消耗最少的控制策略。以上研究均以车辆在平直道路行驶为前提,但在实际车辆行驶过程中,道路坡度对车辆驾驶过程油耗最优控制问题也会产生重要影响。侯建军等[5]研究了高速牵引车冲坡的动力性与经济性问题。曹学自[6]将路网重构与动态规划算法相结合,研究了坡道条件下的车辆预见性巡航。目前对于卡车节油驾驶策略的研究多集中于动态规划算法,但该算法计算量较大,实际应用难度很大。基于以上研究,本文中提出一种基于模型预测控制(model predictive control,MPC)的预见性巡航控制(predictive cruise control, PCC)算法,用于手动挡卡车在高速公路场景下的节油控制。PCC系统作为一种节油辅助驾驶系统,与定速巡航系统(cruise control system,CCS)系统的区别主要有两点:从控制目标上,CCS系统的控制目标是维持设定车速,而PCC系统的目标是提高车辆的燃油经济性;从控制原理上,CCS系统只能被动地感知实际车速与设定车速的偏差,从而补偿式地调整节气门开度,以便保持实际车速向目标车速靠近[7-8]。而PCC系统的优势在于其对道路地势的“预见性”,通过预先获知的车辆前方道路坡度信息,提前规划车辆在前方数公里道路内具有最佳燃油经济性的驾驶策略,并以固定时间步长进行滚动优化计算,实现最优化控制。
1 系统建模
系统模型包括车辆动力学模型与发动机油耗模型。卡车具有非常复杂的动力学特性。针对本文中研究的侧重点,卡车动力学模型采用简化的单自由度模型,即只考虑卡车的纵向动力学特性[9]。发动机油耗模型使用多项式油耗模型,其优点在于可以方便地构造优化问题。
1.1 卡车纵向动力学模型
在卡车的纵向动力学模型中考虑部分旋转部件带来的惯性损失[10],当离合器接触,发动机将扭矩传递给离合器,且满足:
(1)
式中:Je为发动机转动惯量,ωe为发动机角速度,Te为发动机转矩,Tc为发动机向离合器传输的转矩。
假定离合器传动轴为刚性,则
ωe=iωw,
(2)
式中:i为变速箱与主减速器传动比,ωw为车轮角速度。
传递给车轮的转矩
Tw=iηTc,
(3)
式中:η为机械传动效率。
将离合器、传动轴与车轮的转动惯量等效为Jl,则离合器到车轮的驱动力传递过程为:
(4)
式中:rw为车轮有效滚动半径,Ft为地面对车轮的驱动力。
卡车纵向动力学模型可表示为:
(5)
式中:v为车速,m为卡车及货物总质量,g为自由落体加速度,CD为空气阻力系数,A为迎风面积,ρ为空气密度,α为地面坡度角,fr为滚动阻力系数。
1.2 发动机油耗模型
采用Matlab曲面拟合工具拟合仿真车辆的发动机燃油消耗map[11],将燃油消耗率表示为发动机转速和转矩的归一化多项式函数,构建基于发动机转矩的多项式油耗模型。关于发动机转速ne和发动机扭矩Te的多项式函数为:
f=p00+p10Te+p01ne+p20Te2+p11Tene+p02ne2,
(6)
式中:f为燃油消耗率,p00、p10、p01、p20、p11、p02为拟合参数。
由于n=30ωe/π,ωe=vi/rw,多项式函数可表示为:
f=p00+p10Te+30p01iv/(πrw)+p20Te2+30p11ivTe/(πrw)+p02(30iv/(πrw))2。
(7)
2 基于MPC的非线性规划控制策略
以式(5)作为预测模型,将卡车行驶速度v作为状态变量x,将发动机转矩Te作为控制变量u,将道路坡度作为可测量的系统扰动d,将车辆燃油消耗率f作为输出变量y,有:
(8)
选定采样时间T,使用欧拉方法对连续时间的系统状态方程进行离散,并引入积分以消除静态误差,改写为增量模型[12]:
(9)
式中:Δx(k)=x(k)-x(k-1);Δu(k)=u(k)-u(k-1);Δf(x(k),u(k))=f(x(k),u(k))-f(x(k-1),u(k-1))。
以当前时刻k为起点,k时刻的测量值为x(k),上一时刻的系统状态为x(k-1),则Δx(k)=x(k)-x(k-1),以Δx作为起点对系统未来动态进行预测,则k+n时刻的状态增量为:
Δx(k+n)=Δx(k+n-1)+TΔf(x(k+n-1),u(k+n-1),d(k+n-1))=
Δx(k)+TΔf(x(k),u(k),d(k))+
TΔf(x(k+1),u(k+1),d(k+1))+…+
TΔf(x(k+n-1),u(k+n-1),d(k+n-1)),
(10)
由系统状态可以进一步预测k+n时刻的输出:
(11)
预测模型的输出y为单位时间内的燃油消耗量。这种以时间为度量的燃油消耗率不能较好地反应车辆的燃油水平,因为车辆在实际行驶过程中司机更关注的是以路程为度量的燃油消耗量。具体到在每一次计算所得出的P个预测时域上,则是考虑如何规划发动机转矩使得预测模型所表示的车辆对象在这段时间内单位距离内的燃油消耗量最少。设关于车速的函数为h(v),将车速v引入f,则有:
fd=f/h(v),
(12)
式中fd为单位路程内的燃油消耗量。
目标函数
(13)
由于受发动机本身性能的限制,需要对发动机转矩进行约束:
Temin≤Te≤Temax,
(14)
式中:Temin、Temax分别为发动机转矩的最小和最大限值。
车辆在高速公路上行驶时,不同路段有不同的限速要求,因此需要对车速进行约束:
vmin≤v≤vmax,
(15)
式中:vmin、vmax分别为车速的最小和最大限值。
司机在高速公路长途运输过程中,不仅要节约燃油成本,对运输的时效性也有相当的要求,需要加入时效性约束:
vmintp-λ1tp(vmax-vmin)/100≤v≤vmaxtp-λ2tp(vmax-vmin)/100 ,
(16)
式中:tp为预测时域总时长;λ1、λ2分别为调节系数,且0≤λ1≤100,0≤λ2≤100,λ2-λ1≥Δλ,其中Δλ为调节宽度。
综上所述,PCC的经济巡航控制可整理为式(13)(14)(15)的约束非线性规划问题。
在每个控制时域,到来的初始时刻都重复求解上述规划问题,即可得出发动机的转矩控制序列,取序列中的第一个转矩来控制车辆。为保证PCC系统的舒适性要求,设置扭矩变化阈值ΔTe,其与车辆的载重及发动机参数有关。前后两次转矩之差的绝对值不得超过ΔTe,若超过,则第二次的转矩取前一次转矩与ΔTe的和或差。在Matlab中利用序列二次规划算法求解上述非线性规划问题。通过Simulink搭建控制器模型,在S-Funtion模块中实现主要算法步骤,进行上述问题的求解。
3 联合仿真分析
使用某公司开发的基于增量式比例积分微分(proportional integral differential,PID)控制算法的CCS系统与本文中开发的PCC系统进行仿真对比。增量式PID控制算法是通过对本次控制量和上次控制量的差值(增量)进行PID控制的算法。它以增量作为新的控制量,是一种递推式的控制算法。Trucksim是一款专门面向卡车的车辆动力学仿真软件,可通过软件接口将车辆模型发送至Matlab实现联合仿真[13-15]。本文的PCC系统联合仿真中,Trucksim输出车辆的车速和发动机转速至控制器,控制器输出计算得出的发动机转矩,转换为节气门开度后输入到Trucksim中控制车辆的动力输出。
联合仿真模型如图1所示。

图1 联合仿真模型
本文中仿真对象为在Trucksim中自行搭建的牵引车模型,总质量为35 t,变速箱最高挡传动比为0.78,主减速器传动比为3.727,车辆迎风面积为10 m2,轮胎有效滚动半径为0.538 m,传动系统效率为89.1%。利用参数构建了控制算法。车辆挡位设置为卡车在高速公路上使用率最高的12挡。λ1、λ2分别取65和100,侧重经济驾驶。
在Trucksim中建立了上、下坡道路模型和总长24 km的连续道路模型,分别使用PCC策略和CCS策略对仿真对象进行控制和对比分析。上、下坡道路模型用于分析PCC车辆与CCS车辆控制动作的差别,连续道路模型用于定量计算PCC车辆比CCS车辆节省的燃油及比率。为保证道路模型贴合真实道路,以文献[16]为标准设计道路参数。道路模型中的上坡和下坡路段的平均坡度为2%,坡长725 m,坡道高度差为14.5 m,坡道范围内最大坡度不超过3.2%。为保证道路平滑,采用正弦函数构造道路数据;连续道路使用高速公路的真实道路数据建模,数据源来自某公司高精度高级驾驶辅助系统地图。
3.1 上坡路况
PCC与CCS车辆在上坡路段行驶时的仿真结果如图2所示,图2a)为上坡路段的海拔高度变化及车速变化,使用正弦函数构建的上坡道路过渡平滑,符合自然道路的特征。由图2a)可知,与CCS车辆相比,PCC车辆可以提前识别前方上坡路段,在入坡前PCC车辆已提高车速冲坡;图2b)显示了两车在上坡过程中的加速度变化和燃油消耗量变化;由图2b)可知,两车加速度在0.02g以内,具有良好的舒适性。两车在初始阶段燃油消耗量相同,PCC车辆提前冲坡会导致油耗暂时升高,但整段路程中PCC车辆总油耗低于CCS车辆。

a)海拔变化与车速变化 b)车辆加速度变化与燃油消耗量变化
仿真车辆发动机的万有特性如图3所示。由图3可知,PCC车辆与CCS车辆在上坡过程中发动机工作点分布存在差别,PCC车辆发动机工作点位于更低油率区域,解释了PCC车辆油耗低于CCS车辆的原因,因此PCC车辆的燃油经济性更好。

图3 发动机万有特性
3.2 下坡路况
卡车在下坡路况行驶时的仿真结果如图4所示。由图4a)可知,PCC车辆提前识别下坡路段,在入坡前降低了车速;由图4b)可知,在整个下坡路段中PCC车辆和CCS车辆加速度均不超过0.02g,两车在初始阶段燃油消耗量相同,由于提前进入滑行状态,PCC车辆油耗低于CCS车辆。

a)海拔变化与车速变化 b)车辆加速度变化与燃油消耗量变化
3.3 连续道路
仿真过程中PCC车辆以计算得出的经济车速行驶,测试选择沪渝高速某段道路,该道路经过一片山区。道路的纵向海拔变化如图5所示。
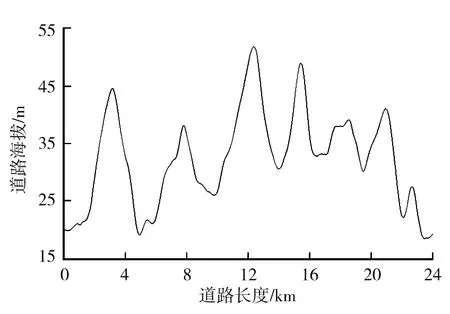
图5 仿真测试道路海拔变化
CCS车辆以PCC车辆在整段道路的平均速度为目标车速行驶,车辆高速公路仿真测试结果如图6所示。仿真过程中两车的车速变化如图6a)所示,相比CCS车辆,PCC车辆能够提前对前方路况做出反应,车速比较平稳;仿真过程中两车燃油消耗量的变动情况如图6b)所示,整段道路长24 km,PCC车辆用时1 060.3 s,耗油7.84 kg,CCS车辆用时1 072.7 s,耗油8.14 kg。PCC车辆比CCS车辆燃油消耗减少0.3 kg,节油率提高3.6%,用时减少1.2%。

a)车速变化 b)燃油消耗量变化
4 结语
将模型预测控制与非线性规划相结合,针对卡车开发基于PCC算法的节油驾驶控制策略,解决卡车在行驶过程中的节油控制问题。该PCC控制方法可根据道路前方地形对所控车辆做出节油控制动作,实现类似人工驾驶的“冲坡”和“减速滑行入坡”的操作。由于该算法可以提前感知道路地形变化,从而提前做出控制动作,使得卡车发动机整体运行平稳,减少了急加速对发动机造成的冲击。
基于实际高速公路数据建立道路模型的仿真试验表明,PCC车辆相比于CCS车辆节油率提高了3.6%,且用时减少了1.2%。
