多功能水平回转式牧草搂翻一体机设计与试验
2021-06-18董佳佳包德胜翟改霞赵小娟孙文婷
董佳佳,王 强,包德胜,杨 莉,翟改霞,赵小娟,孙文婷
(中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古 呼和浩特 010010)
0 引言
随着我国天然草原植被不断恢复及人工草地建设规模逐年扩大,国家对牧草收获机械化政策的扶持力度不断加大,极大地调动了农牧民购机的积极性,活跃了国内牧草机械市场。用户对先进的牧草搂翻装备产生了强烈需求,但目前国内搂草机搂翻性能差,自动化程度低,地面仿形能力差,功能单一,效率低、损失大,使牧草产量及质量均受到很大影响[1]。据不完全统计,我国搂草设备发展相对滞后导致割后牧草不能及时得到收集与晾晒,草条干燥时间增长,因落叶、氧化、光化学等原因,在收贮晾晒过程中造成营养损失达30%~40%甚至更多,并且多有陈草、泥沙等混杂,使收贮牧草品质严重降低,同时给捡拾尤其是压捆等后续收贮工序带来困难,牧草产量及质量均受到很大影响[2-4]。这种严重的浪费给我国饲草资源本就匮乏的现状造成巨大的压力。
针对以上问题,课题组设计了多功能水平回转式牧草搂翻一体机。该机采用纵裂式双转子结构,搂草装置结构紧凑,转向锁定装置灵活,方便搂草机工作模式的调整。与横向搂草机相比,其连续性较好,牧草无缠绕现象,草条蓬松规整透气性好,有利于后续进行牧草捡拾打捆作业。
1 整机结构及工作原理
1.1 整机结构及主要技术参数
多功能水平回转式牧草搂翻一体机整机结构如图1所示,主要由机架、传动系统、前后转子、搂耙、地轮行走机构、转向锁和液压系统等组成。
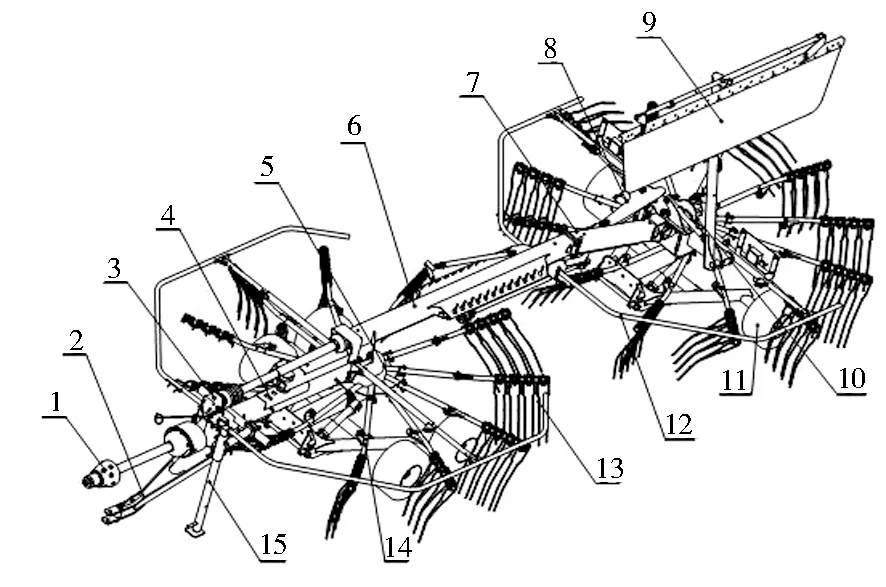
1.传动轴 2.牵引架 3.圆柱齿轮箱 4.前梁 5.前转子 6.中间梁 7.后梁 8.转向锁定装置 9.挡草帘 10.后转子 11.地轮行走机构 12.护杆 13.搂耙 14.升降油缸 15.支腿图1 多功能水平回转式牧草搂翻一体机结构Fig.1 Structure of multifunctional horizontal rotary forage raking and turning machine
该机采用纵裂式双转子结构,主要由两个转子前后配置组成,其中前转子均布11个搂齿臂,后转子均布12个搂齿臂,每个搂齿臂上有4副弹齿。工作时,通过液压机构调整后转子相对于前转子的位置,使得机具既可以形成单列草条,也可以形成双列草条。本机具既可以完成搂集草条工作,也可以实现翻铺草条的工作,其主要技术参数如表1所示[5]。

表1 多功能水平回转式牧草搂翻一体机主要技术参数Tab.1 Main technical parameters of multifunctional horizontal rotary forage raking and turning machine
1.2 工作原理
多功能水平回转式牧草搂翻一体机动力由拖拉机动力输出轴提供,其整个动作过程由机械传动、液压操控来完成。作业时,拖拉机牵引机具前进的同时,动力输出轴经传动系统、驱动前后两个转子进行搂草和翻铺草条作业。动力通过圆锥齿轮箱带动与锥齿轮连接的凸轮罩连同整个搂草转子做回转运动,由于受凸轮轨道的控制及凸轮罩锁定位置的限制,搂耙弹齿根据要求在不同位置转成不同倾角,并随着转子的旋转完成对牧草的搂集过程。转向锁3个不同的挡位,用来控制搂草机不同的工作位置。
2 关键部件设计
2.1 传动系统
多功能水平回转式牧草搂翻一体机作业时,动力由拖拉机动力输出轴经万向传动轴传递给圆柱齿轮箱,圆柱齿轮箱有两个相同转速的输出轴再经万向节传递给前、后转子齿轮箱驱动两个搂齿转子一同作业[6]。动力传动系统如图2所示。
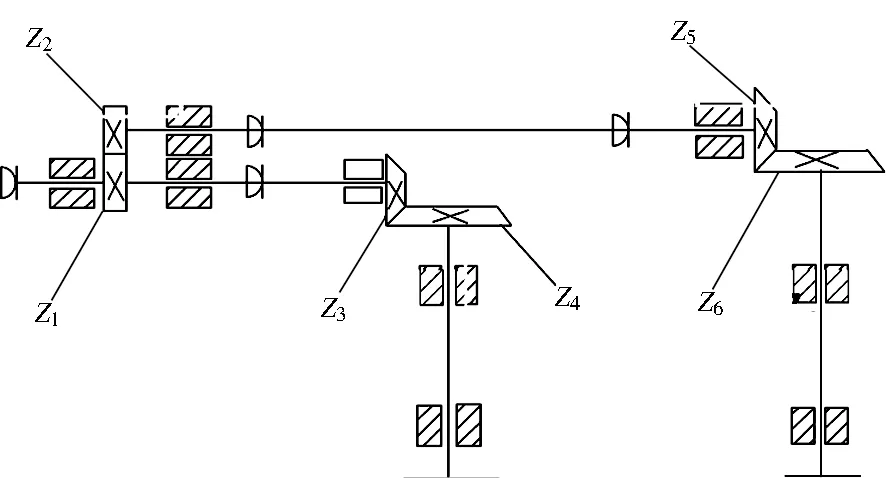
图2 动力传动系统Fig.2 Power transmission system
因Z1=Z2,Z3=Z4,Z5=Z6,机具作业传动比按式(1)计算
(1)
式中Z3——前转子圆锥齿轮传动主动锥齿轮齿数
Z4——后转子圆锥齿轮传动主动锥齿轮齿数
Z5——前转子圆锥齿轮传动从动锥齿轮齿数
Z6——后转子圆锥齿轮传动从动锥齿轮齿数
设计i=1.5。
2.2 搂草装置
搂草装置是多功能水平回转式牧草搂翻一体机的核心部件。搂草装置主要由立轴、锥齿轮副、轴承、齿轮箱盖、齿臂轴、凸轮轨道和导向辊子等组成,如图3所示。

1.立轴 2.锥齿轮副 3.导向辊子 4.凸轮轨道 5.齿臂轴6.齿轮箱盖 7.轴承图3 搂草装置结构Fig.3 Structure of raking device
齿轮箱以立轴为中心支轴,凸轮轨道、冠状齿轮、齿轮箱上下盖、连接座等部件均安装在立轴上。冠状齿轮安装于齿轮箱上盖,与安装在连接座上的花键锥齿轮轴配对啮合。齿臂轴套套在齿臂轴上后,与齿轮箱上下盖连接,齿臂轴头部导向辊子顺势插入凸轮轨道槽内。动力通过花键齿轮轴进入,通过与之啮合的冠状齿轮带动齿轮箱体转动,使凸轮轨道驱动齿臂轴旋转,从而带动安装于齿臂轴另一端的搂齿臂进行搂集作业[7]。齿轮箱完全封闭式设计保证了彻底和永久润滑,在后续的工作中免润滑,提高了机具安全可靠性。
2.3 转向锁定装置
多功能水平回转式牧草搂翻一体机工作状态由转向锁定装置调整。该装置由控制把手、螺栓套筒、调整压缩弹簧、锁紧板、上下板、伸出梁端销轴、调整垫圈、转向锁油缸、机架销轴、锁紧螺栓、固定螺栓、转动拉伸弹簧和限位销轴套等组成,如图4所示[8]。
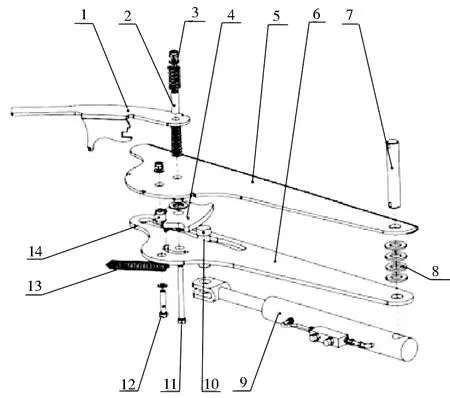
1.控制把手 2.螺栓套筒 3.调整压缩弹簧 4.锁紧板 5.上板6.下板 7.伸出梁端销轴 8.调整垫圈 9.转向锁油缸 10.机架销轴 11.锁紧螺栓 12.固定螺栓 13.转动拉伸弹簧 14.限位销轴套图4 转向锁定装置结构Fig.4 Structure of steering locking device
多功能水平回转式牧草搂翻一体机转向锁定装置分设3个不同的挡位,控制伸出梁扭转位置,如图5所示。当伸出梁需要向左偏转时,先保证伸出梁在中心位置,然后调整控制把手到图5a所示挡位,此时在锁紧板及限定销轴套的限制下,转向锁油缸只能缩短,不可伸长,在转向锁油缸缩短过程中,实现伸出梁只能向左扭转。当伸出梁需要向右偏转时,以相同方式,将控制把手调整到图5c所示挡位,此时转向锁油缸只能伸长,不可缩短,在转向锁油缸伸长过程中,实现伸出梁只能向右扭转。当控制把手调整到图5b所示挡位时,转向锁油缸不受锁紧板限定,此时转向锁油缸可以伸长或缩短,即实现伸出梁处于自由运动状态[9]。
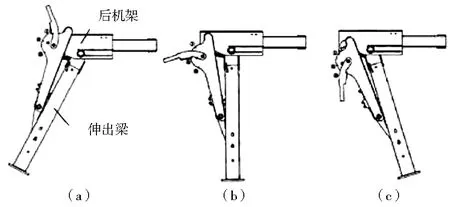
图5 转向锁定装置挡位Fig.5 Steering lock gear position
3 田间试验
3.1 试验条件
在呼和浩特市土默特左旗塔布赛牧草种植基地进行田间试验。试验地作物为苜蓿草,苜蓿割后在田间晾晒数日,其含水量达到40%左右进行搂翻作业试验[10-11]。机具配套动力为约翰迪尔654型拖拉机,动力输出轴转速540 r/min。
3.2 试验方法及结果
性能试验方法按GB/T 14247—2015《搂草机试验方法》的规定执行。
3.2.1 漏搂率的测定
在每一行程选5 m分别捡拾搂草机通过的面积内未搂到的且长度>7 cm的牧草称量,计算漏搂率。试验数据如表2所示,漏搂率按式(2)~(3)计算。
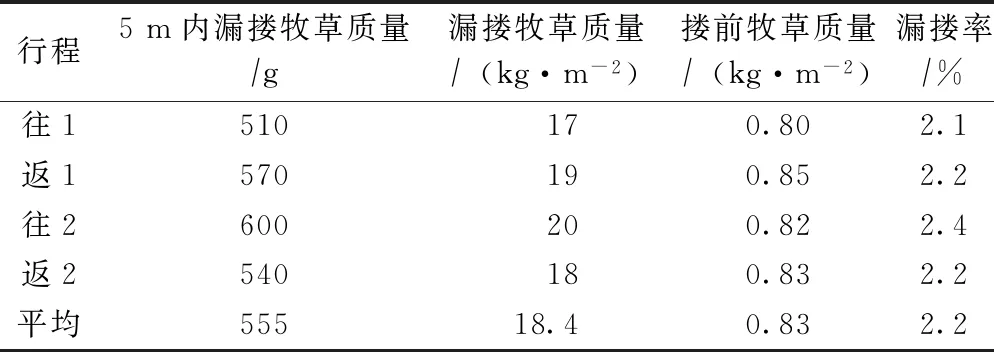
表2 漏搂率测定数据Tab.2 Measurement data of leakage rate
(2)
式中B——平均漏搂牧草质量,kg/m2
m1——各行程5 m内漏搂牧草质量之和,kg
nx——测定行程数
A——搂草机平均搂幅,m
(3)
式中Ll——漏搂率, %
mc——搂前牧草质量,kg/m2
根据式(2)计算的牧草漏搂率为2.2%(<5%),漏搂部分主要是较短的或已脱落的花叶。
多功能水平回转式牧草搂翻一体机田间作业运行平稳,搂集的草条蓬松、宽度均匀且漏搂率小。试验草场及机具试验作业过程如图6~8所示。

图6 试验草场Fig.6 Experimental pasture

图7 作业现场Fig.7 Operation site

图8 搂翻后的牧草Fig.8 Grass after raking and turning
3.2.2 花叶损失率的测定
测定搂前花叶和茎秆的湿质量与干质量、搂后花叶和茎秆的湿质量与干质量,计算叶秆比和花叶损失率。试验数据如表3所示,叶秆比按式(4)计算。
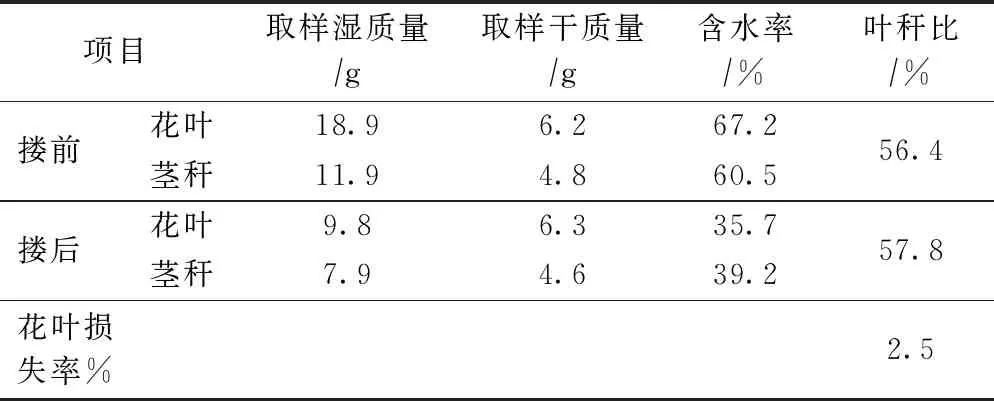
表3 叶秆比、花叶损失率测定数据Tab.3 Loss rate measurement data of leaf stalk ratio and flower leaf
(4)
式中Sy——叶秆比
my——烘干后花叶质量,g
mj——烘干后茎秆质量,g
按式(5)计算花叶损失率
(5)
式中Syh——作业后的叶秆比
Syq——作业前的叶秆比
田间试验证明,多功能水平回转式牧草搂翻一体机作业草条整齐、翻晒均匀疏松、花叶损失率为2.5%(<3%),花叶损失小、作业效果好、可靠性高。
4 结论
研制了一款多功能水平回转式牧草搂翻一体机,该机采用纵裂式双转子结构设计,搂草装置结构紧凑,转向锁定装置能够灵活、方便地实现牧草搂翻工作模式的调整,是优质饲草生产过程中不可或缺的机具。
田间试验结果表明,该机漏搂率2.2%、花叶损失率2.5%,达到设计和使用要求。各项技术参数及关键部件结构设计合理,适宜于我国牧草生产需求。
