基于GNSS的平地控制系统优化设计与试验
2021-06-18李晓宇董方园秦振丰
李 由,张 吉,李晓宇,董方园,秦振丰
(上海联适导航技术股份有限公司,上海 201702)
0 引言
农田土地平整度是影响土地灌溉效率和土壤矿物质均匀度的关键因素[1]。随着我国农业向精准化发展,对农田平整度有更高要求,提高农田精细平整技术可有效增加土地利用率、改善土壤质量和满足精细灌溉需求,以达到节水增产目的[2-3]。
目前,土地平整技术主要有激光平地技术和全球导航卫星系统(GNSS)平地技术,激光平地技术利用激光和液压控制系统作为非视觉手段,实现农田土地的精细平整,但激光平地技术作业半径小,易受外界环境影响,不适合平整高程差较大的土地[4-5]。GNSS平地技术通过GNSS差分定位获取农田高程数据,通过实际高程与设定的基准高程差来控制铲体的升降实现土地精细平整,具有集成度高、可视化强和效率高等优点,相较于激光平地技术应用前景更好[6-7]。
由于GNSS定位数据具有随机误差和离散性,使用GNSS定位高程数据进行闭环控制铲体,容易导致平地铲在田地振荡形成肉眼可见的高低起伏——“波浪地”。因此,国内GNSS平地设备普遍在高速作业状态下平地效果不好,而增大控制滞环有助于改善此现象,但会使平地铲的控制精度降低[8-9]。基于此,中国农业大学刘刚团队提出了一种滤波算法,可减少多径效应和随机误差对高程测量的影响,但该算法运行成本高,需要对不同平地铲做校准,难以商业推广[10-11]。
针对上述问题,本文设计了一种农田土地精细平地控制系统,提出一种可控制时长的滞环控制算法,根据平地铲的运动特征,对平地铲控制动作在时间上进行精细划分,以减少平地铲超调,提高平地铲的作业精度。
1 系统工作原理和总体设计
1.1 GNSS平地控制系统工作原理
GNSS平地控制系统主要由GNSS基站、GNSS天线、RTK-GNSS接收机、控制器、液压系统、车载终端计算机和平地铲设备构成,如图1所示。
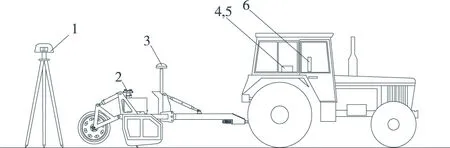
1.GNSS基站 2.液压系统 3.GNSS天线 4.RTK-GNSS接收机 5.控制器 6.车载终端计算机图1 GNSS平地系统组成Fig.1 GNSS flat level system composition
农田土地精细平地控制系统工作原理是利用RTK-GNSS接收机接收GNSS基站发送的差分信号获取农田三维数据[12-17]。控制器实时接收RTK-GNSS接收机测量到的平地铲绝对高程数据,通过车载终端计算机给控制器输入基准高程作为平地机作业的基准面,在平整作业过程,控制器通过实时对比测量点的实际高程值与基准高程,根据当前地势差值情况驱动液压系统控制平地铲完成土地平整。
1.2 GNSS平地控制系统总体设计
根据GNSS平地控制系统工作原理,结合国内外对GNSS平地控制的研究成果,提出了基于GNSS土地精平机电控制系统的优化方法,其中GNSS土地精平机电控制系统如图2所示。
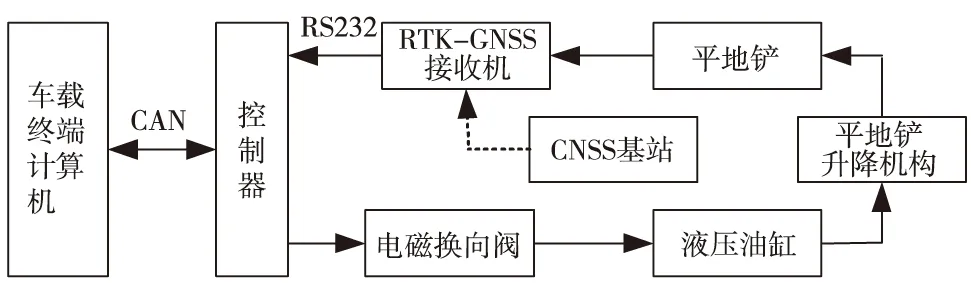
图2 系统总体设计Fig.2 System overall design
GNSS系统选用上海联适导航技术有限公司自主研发的R61接收机、GNSS天线和R25基站,R25基站内置GNSS高精度板卡、双4G全网通讯模块、蓝牙模块和无线电通讯模块于一体。车载终端计算机使用上海联适导航技术有限公司自主研发设计的T100车载平板,搭载Andriod系统,配合自主开发的GNSS平地上位机软件来辅助平地作业。控制器采用Cortex-M3为核心处理芯片,集成RS232和CAN通讯电路,为满足农业使用环境的需求,使用防水防尘的塑料外壳将平地控制器封装在内,并将壳体固定在拖拉机驾驶舱内。液压系统和铲运装置是农田平整的机械设备,液压系统根据控制器的控制指令来开关电磁阀,改变液压油的流向,使得液压油缸柱塞产生位移来控制平地铲体的升降。
2 控制方法
2.1 一般滞环控制算法
我国市场现有的平地机大都使用开关换向阀作为控制部件,开关换向阀只能控制液压流向不能控制液压流量,因此在换向阀流量相同的情况下,无论高程差大小,控制器只能通过判断误差方向及是否大于阈值来控制平地铲升降。在自动控制模式下,控制器控制换向阀的周期一般与RTK-GNSS接收机输出的定位数据更新周期相同,每当定位数据更新一次,控制器计算当前误差,如果大于阈值则驱动电磁阀,执行相应的抬升下降动作。其控制流程如图3所示。
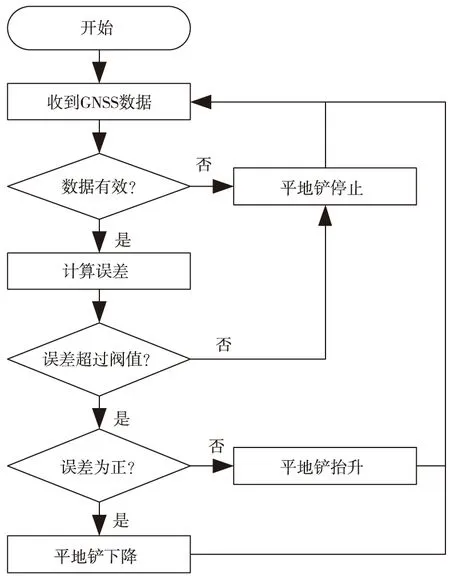
图3 一般滞环控制算法流程Fig.3 Flow chart of general hysteresis control algorithm
由控制流程图可知,一般滞环控制算法是根据平地铲当前高程H1和基准高程H2计算误差δ,通过阈值η与误差δ的差值大小来控制平地铲的升降,则有
δ=|H1-H2|
(1)
当δ<η时,平地铲不进行高程调整,当δ>η时,控制器发送控制指令控制平地铲升降,由于平地铲在每个控制周期升降距离L是相同的,则有
ε=L-δ
(2)
当误差ε>η时,表示调整铲体高程时发生超调,超调导致平地铲在滞环边抖动,平整过的地面会有较多波浪形。
2.2 可变控制时长的滞环控制算法
针对GNSS定位数据有随机误差,使用一般滞环控制算法容易导致超调,本文提出一种可控制时长的滞环控制算法,通过控制电磁阀的通电时间,实现高精度的平地铲升降控制。
平地铲开关换向阀的阀芯开口大小恒定,电磁阀开启后通过阀芯的液压流量相对恒定,即液压缸运动速度相对一致,因此在电磁阀工作时,平地铲的上升速度和下降速度也相对一致。可以通过控制电磁阀的通电时间,来控制平地铲的相对高度变化。考虑到平地铲的抬升和下降时液压系统负载不同,需要对平地铲的抬升和下降速度做标定。为了取得相对准确的平地铲上升速度Vu和下降速度Vd,先测得平地铲极限高程变化量H,再多次测量上升行程总时间Tu和下降行程总时间Td,则Vu和Vd的计算公式为
(3)
每当定位数据更新后,将平地铲和基准面的误差δ与阈值η比较,如果|δ|>η,选择对应得速度计算电磁阀通电时间t,则有
(4)
使用该方法后相当于将一个控制周期内的时间进行了细分,原来一个控制周期内平地铲升降的距离是一个定值,该方法根据误差计算通电时长,使得平地铲刚好运动到阈值范围,减少平地铲超调引起的震荡。
3 GNSS平地试验与分析
3.1 试验材料与方法
为了验证本文提出的控制方法可行性,选取黑龙江省建三江管局七星农场的一块500 m×500 m地块,使用拖拉机作为牵引车,牵引2.5 m幅宽的GNSS土地精平设备,试验环境如图4所示。

图4 试验场地Fig.4 Test site
田间试验及数据采集:首先使用GNSS平地系统将试验地块平整一遍,使地块相对高差不超过5 cm,然后抬高基准面使得铲刀离地5 cm左右,记录基准高程。分别使用上述一般滞环控制算法和可变控制时长的滞环控制算法,设置阈值1.5 cm,分别在地块中用4和9 km/h的速度自动作业,沿固定的路径绕圈行驶,并通过CAN各采集1 h试验数据,使用Excel筛选统计数据。
3.2 试验结果与分析
本试验用于验证本文设计的GNSS土地机电精平控制系统完成作业后所能达到的效果,需要在已经基本平整完成的地块中进行,将平地铲抬离地面是为了防止平地铲破坏地形导致无法对比数据。本文主要对比基准面±1.5 cm范围内点的占比,±2 cm范围内点的占比,执行控制动作的控制周期占比(动作占比),高程值穿越阈值范围的次数(翻转率),以及高程值在2 s内变化超过4 cm的点(突变率),试验数据统计结果如表1所示。
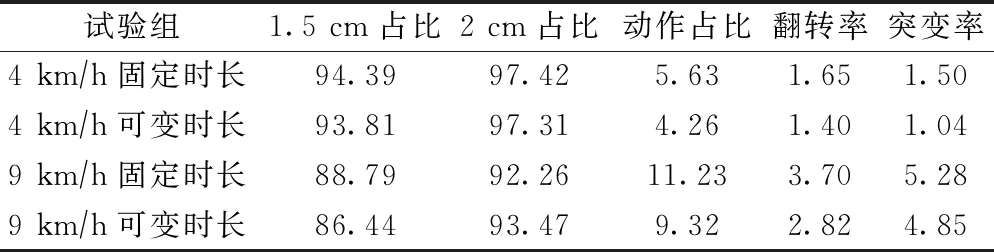
表1 试验数据统计Tab.1 Test data statistics 单位:%
通过试验数据可知,在低速作业状态下,使用可变时长滞环控制算法时平地铲动作占比由一般滞环控制算法的5.63%减小到4.26%,同时平地铲的翻转率由1.56%减小到1.40%,定位高程值的突变率由1.50%减小到1.04%;在高速作业状态下,使用可变时长滞环控制算法时平地铲动作占比由一般滞环控制算法的11.23%减小到9.32%,同时平地铲的翻转率由3.70%减小到2.82%,定位高程值的突变率由5.28%减小到4.85%。采用改进后的可变时长滞环控制算法,明显减少了液压缸的动作,并且减少了平地铲在基准面附近震荡的情况,更低的突变率也会使得平整过的地面看起来更平缓,特别是高速情况下的数据,说明可变时长的控制方法可以明显改善高速作业下“波浪地”的问题。
4 结论
本文设计完善了基于GNSS的精准平地控制系统,提出一种可变时长滞环控制算法,该方法根据误差计算电磁阀的通电时长,相当于将一个控制周期内的时间进行了细分,可有效减少平地铲因超调而在基准面附近震荡。经室外测试验证,平地系统在低速作业下可减少15%的震荡,在高速作业时可减少23%的震荡,同时也有效降低了平地铲的高程突变,在低速作业时减少30%,在高速作业时减少8%的突变。无论高速还是低速作业,都能保证90%以上的点在±2 cm以内,满足土地平整的精度要求,符合推广应用。
