基于驾驶室半主动悬置的载货汽车平顺性提升方法
2021-06-16陈鑫淼刘夫云邓聚才刘凯扬唐振天王越
陈鑫淼,刘夫云,邓聚才,刘凯扬,唐振天,王越
(1.桂林电子科技大学 机电工程学院,广西 桂林541000 2.东风柳州汽车有限公司 商用车技术中心,广西 柳州 545005)
随着社会对载货汽车平顺性要求的不断提高,这便要求重卡在舒适感、稳定性等方面需具备良好的性能。由于被动悬置各方面的局限性,性能优化改进效果有限,从而推动了控制系统在驾驶室悬置方面的研究。控制系统分为主动和半主动控制,主动悬架系统在乘坐舒适性、操控性比传统被动系统有很大的优势。但只有在性能至关重要的情况下,以主动系统替代被动系统所带来的成本和复杂性的增加才是合理的。为了解决这些问题,且随着市场上如MRD和CDC减震器等执行器的广泛应用,使半主动控制系统应用到商用车上成为可能[1-3]。
半主动控制策略的研究在国内外都受到学者和企业的广泛关注。经典半主动控制策略如天棚控制算法[4],加速度阻尼控制算法[5],SH-ADD控制算法[6-7];现代控制理论如最优控制策略[8],模糊LQR控制策略[9];智能控制策略如模糊PID控制器[10]等。
综合考虑驾驶室性能提升、成本控制、以及系统的执行效率等因素,经典半主动控制策略如天棚控制算法更为成熟且易于工程实现;目前CDC减震器因具有结构简单、响应迅速,性价比高且易于工程实现的优点在市场上得到了广泛的应用[3]。
基于以上原因,为进一步通过提升驾驶室的舒适性来提升其平顺性,本文以降低驾驶室质心垂直加速度、俯仰角加速度和侧倾角加速度为目标,以某重卡驾驶室悬置系统作为研究对象,建立基于天棚控制算法思想的3自由度驾驶室悬置数学模型,通过模态解耦的方法得到3个独立的振动方程并求出驾驶室天棚阻尼力[11],最终通过CDC减震器所能提供的可变阻尼力来间接性代替天棚阻尼力,从而达到驾驶室半主动控制的效果。本文将某重卡ADAMS整车模型作为仿真对象,以建立ADAMS的C级路面作为激励输入,利用ADAMS car/Simulink联合对整车半主动悬置控制系统进行仿真分析,验证了该算法的有效性。
1 驾驶室悬置系统动力学模型
1.1 传统1/4车辆天棚阻尼动力学模型
天棚控制的思想是通过一个阻尼器将车身和天空”连接”起来,从而减小车身的垂向振动,如图1所示。其中Csky为天棚阻尼系数,Csh和ks分别为悬架可调阻尼系数和悬架弹簧刚度,kt为车轮刚度,qg为随机路面激励,Zw和Zc分别为车轮和车体的垂向位移向位移,将这种理想控制动力学模型的控制方法进行数学建模:
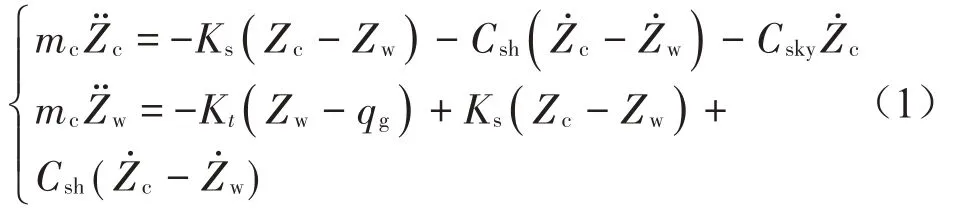
由于这种控制模型理论上难以实现,目前实际应用中通过半主动阻尼器来间接性实现这样的天棚阻尼力Csky这个控制规律根据1/4车身速度和悬架的变形速度(-),以开关半主动控制来改变悬架可调阻尼系数Csh:

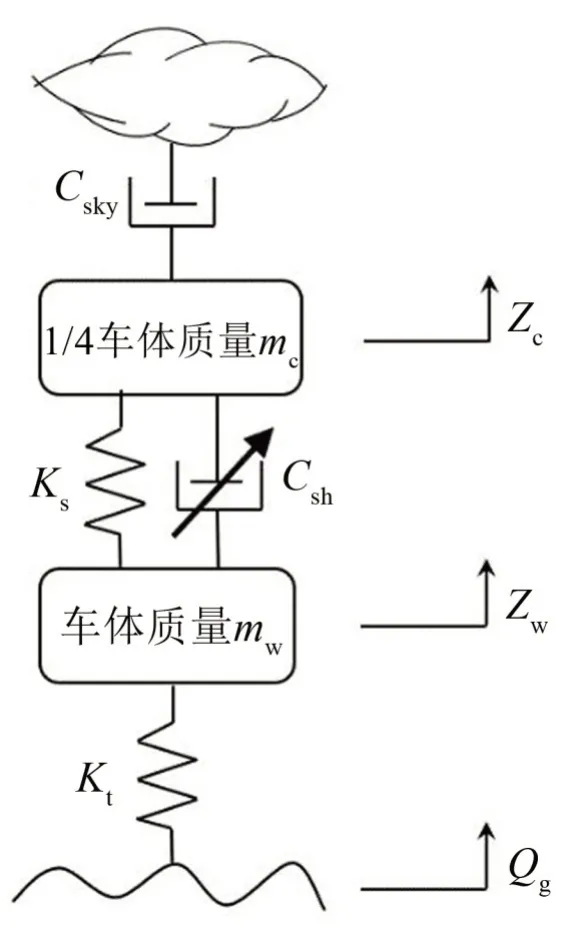
图1 1/4车辆天棚阻尼
式中:Cmax1和Cmin1分别为可调阻尼器所能达到的最大和最小阻尼系数[4]。
1.2 驾驶室天棚阻尼动力学模型
针对某重卡驾驶室悬置结构模型进行简化,如图2所示,忽略减振器的质量,将驾驶室视为刚体,且具有垂直,侧倾,俯仰3个自由度,驾驶室通过4个由弹簧和减振器期望阻尼力原件组成的隔振系统支撑。
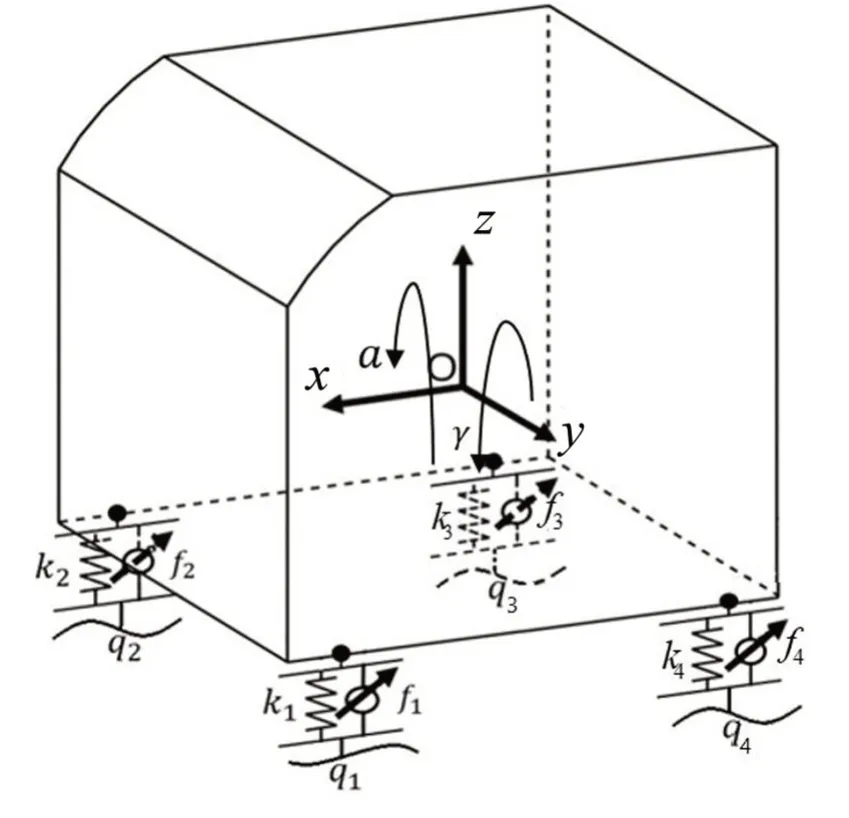
图2 3自由度驾驶室悬置期望阻尼力模型
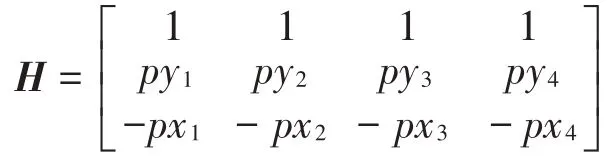
其中x轴正方向为行车方向,y轴为侧向,Z轴根据右手定则得出,O为驾驶室质心坐标,zc、α、γ分别为驾驶室质心的垂直位移、侧倾角和俯仰角。pyi为驾驶室悬置点i的y轴坐标,pxi为驾驶室悬置点i的x轴坐标,ki为悬置点i处的弹簧刚度。fi为驾驶室悬置点i受到减震器的期望阻尼力(i=1,2,3,4分别对应xOy平面第1,2,3,4悬置点的投影点)。m为驾驶室质量,Iyy为俯仰转动惯量,Ixx为侧倾转动惯量,Cskyz为驾驶室垂直天棚阻尼系数;这里定义旋转天棚阻尼系数Cskyrx和Cskyry,Cskyrx为驾驶室侧倾天棚阻尼系数,Cskyry为驾驶室俯仰天棚阻尼系数,Cskyrx、Cskyry与Cskyz物理意义不同但相近,Cskyrx和Cskyry与角速度相乘相当于力矩,Cskyz与速度相乘相当于力,其目的均是衰减驾驶室相对应方向的位移、速度和加速度。令驾驶室位姿矩阵X=[zc α γ]T。根据牛顿运动定律,驾驶室3自由度模型振动满足:

其中:H为驾驶室悬置点坐标转换矩阵。
M为驾驶室质量矩阵M=diag(m Ixx Iyy),
C为天棚阻尼矩阵C=diag(Cskyz Cskyrx Cskyry),K1为悬置系统弹簧刚度矩阵K1=H*diag(k1k2k3k4)*HT,K为输入系统弹簧刚度矩阵K=H*diag(k1k2k3k4),F为减震器期望阻尼力矩阵F=H*[f1f2f3f4]T,Q为悬置系统下端激励矩阵Q=[q1q2q3q4]T。
2 驾驶室天棚控制设计
现对此3自由度驾驶室振动方程进行解耦[12],引入振型矩阵A与振型坐标矢量n,并进行线性变换X=An,代入式(3)中得:

将式(4)左乘矩阵AT,得:


其中:Cd为矩阵对角线上的元素,此时在振型坐标下,系统的质量、刚度、阻尼矩阵均已完全解耦,式右端可看作系统的外界激励,式左端可看作包含天棚阻尼系数的3个独立振型坐标矢量n的微分方程。
单自由度系统的阻尼比ζ=1时,系统的隔振效果最好;根据控制理论,阻尼系数采用临界阻尼比的方法比较适用于随机输入系统[13],因此从隔振效果的角度考虑,选取ζ=1具有一定的优势。根据式(6)和ζ=1分别求得该驾驶室系统的3个天棚阻尼系数Cskyrx、Cskyry与Cskyz。
由于汽车的平顺性主要是根据人主观感觉的舒适性来进行评价,且驾驶室的加速度是反映舒适性的重要指标,而天棚阻尼力仅是通过对车体速度的抑制来实现,因此对提升舒适性的效果有限。为进一步改善驾驶室的舒适性,此处对天棚阻尼系数进行改进,(以下以驾驶室质心垂向为例)当驾驶室质心加速度与驾驶室速度方向相同时,通过对天棚阻尼系数进行适当的放大可以有效抑制驾驶室质心加速度的减小,根据振型坐标n与位姿矩阵X的关系。改进的天棚阻尼系数表达式为
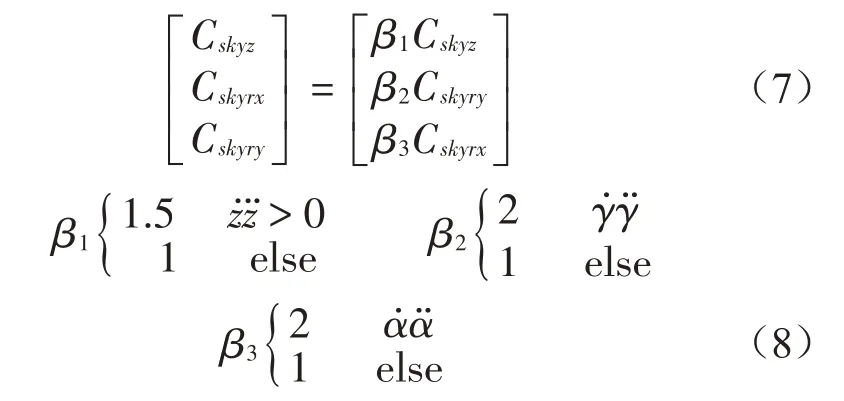
放大系数β1(i=1,2,3)可根据实际情况选取,或以各加速度均方根值最小为优化目标来选取。
将式(6)移项得:

因天棚阻尼力(Cd+Cod)无法在实际中实现,现通过装置在驾驶室的4根减振器的阻尼力来间接性代替天棚阻尼力从而实现整车天棚阻尼控制,即令:


因后悬置减震器的相对速度相对于前悬置较小,为简便计算并考虑对称性,令f3=f4,则可求得四个悬置点的期望阻尼力f1,f2,f3,f4。根据CDC减震器的电流-相对速度-阻尼力曲线[14],通过线性拟合的方式定义CDC减震器阻尼力-相对速度曲线,如图3所示。
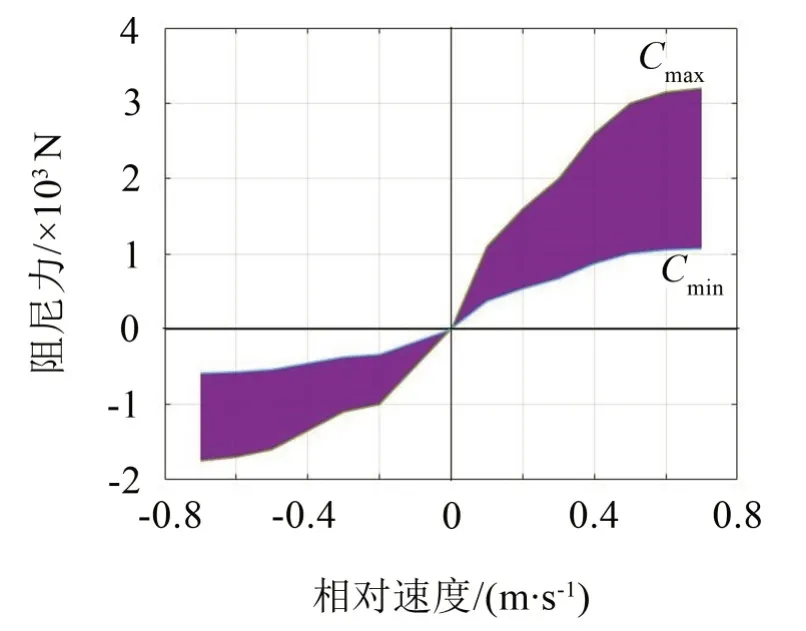
图3 CDC减震器阻尼力-相对速度曲线图
其中曲线Cmax限制减震器最大阻尼力fmax,Cmin限制减震器最小阻尼力fmin,阴影部分为可输出的阻尼力。由于CDC减震器输出阻尼力的方向只与相对速度的方向有关,因此悬置点的期望阻尼力与相对速度方向相同时,取最小阻尼力;悬置点的期望阻尼力与相对速度方向相反时,取阴影部分的阻尼力,即:
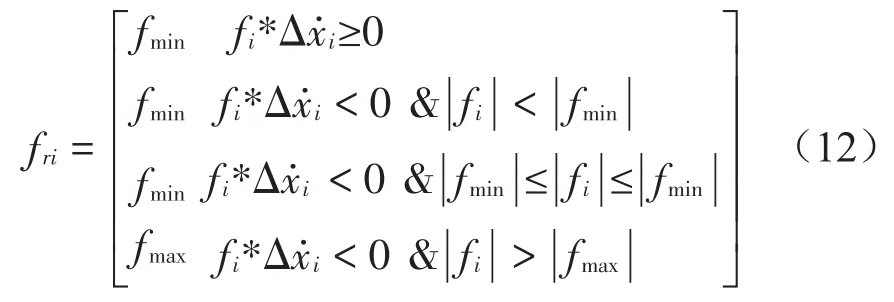
其中:fri为减振器实际输出阻尼力为减振器两端相对运动速度,令则其中X为驾驶室质心位姿矩阵,H为驾驶室悬置点坐标转换矩阵,Q为悬置系统下端激励矩阵。
3 仿真计算
若以路面为悬置激励对驾驶室进行仿真,则没有考虑车架、轮胎和簧下等偏频的影响,同时驾驶室半主动悬置系统控制也对车架的运动状态有所影响,考虑以上因素,基于某重卡的驾驶室悬置系统的结构参数,利用ADAMS建立整车多体动力学模型,如图4所示。其驾驶室主要参数如表1所示。
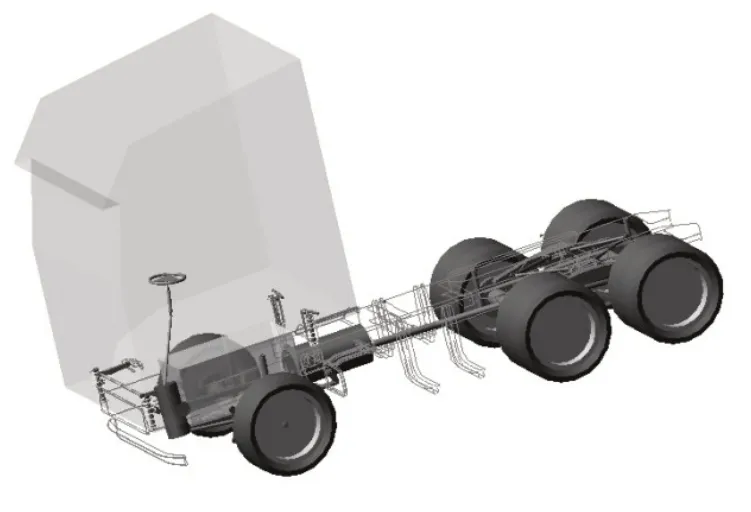
图4 重卡整车Adams模型
在Adams模型中,CDC减震器阻尼力被简化为由Simulink控制的阻尼力约束,同时Simulink模型中提取悬置相对速度并通过插值获取阻尼力(如图4所示),用以模拟真实的CDC减震器。在Simulink中搭建驾驶室天棚阻尼控制模型和驾驶室被动悬置模型并与ADAMS搭建的整车模型进行联合仿真控制。
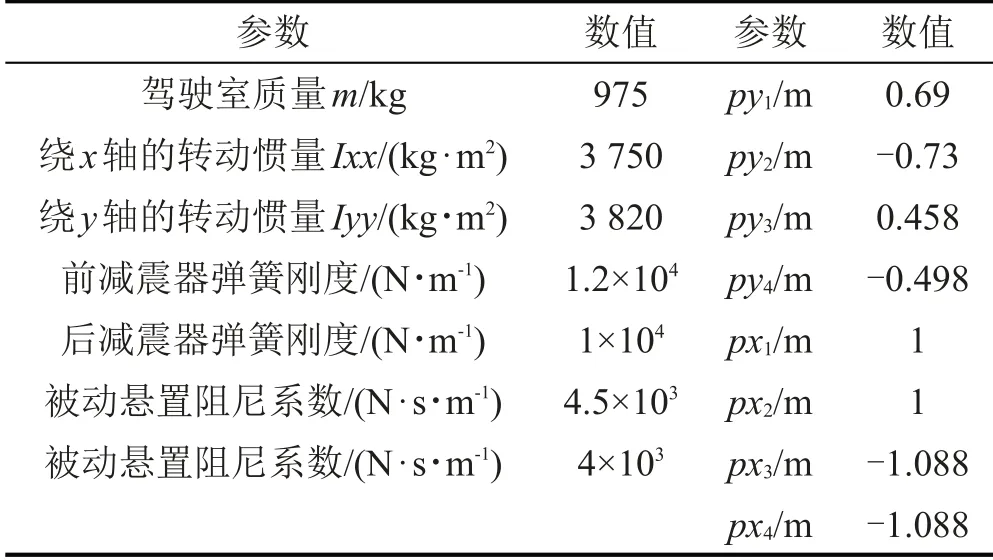
表1 驾驶室悬置系统主要参数
给定车速v=50 km/h和v=70 km/h,以ADAMS的C级路面作为整车的路面激励输入,仿真步长为0.004 s。
整车以车速v=70 km/h在C级路面激励条件下,驾驶室系统的加速度时域结果如图5所示。仿真结果显示,车身的2个自由度:垂向振动、俯仰运动加速度均明显下降,且峰值处改善较为明显,而侧倾加速度改善效果不明显,原因是整车天棚控制主要以通过对车体速度的抑制来实现的,侧倾角速度相对于垂直速度和俯仰角速度较小,因此该天棚控制对侧倾加速度的改善效果欠佳。
表2至表4分别为C级路面,两种车速下驾驶室质心垂直、俯仰和侧倾3个方向的加速度均方根值。

表2 不同速度下驾驶室质心垂直加速度均方根值

表3 不同速度下驾驶室质心俯仰加速度均方根值
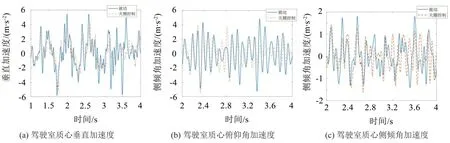
图5 驾驶室加速度相应时域图

表4 不同速度下驾驶室质心侧倾加速度均方根值
从表2至表4可以看出,相比于被动悬置系统,整车天棚阻尼控制算法能有效降低驾驶室质心俯仰角加速度和垂直加速度均方根值,减小幅度约为17%~20%,因整车天棚阻尼控制算法控制力大小主要是根据驾驶室质心垂直、俯仰和侧倾3个方向的速度来决定。绝大多数情况下,俯仰方向和垂直方向都比侧倾方向振动的更加强烈,所以对其改善也较大。
图6显示的是整车以车速v=70 km/h在c级路面激励条件下,加速度功率谱密度(PSD)图。
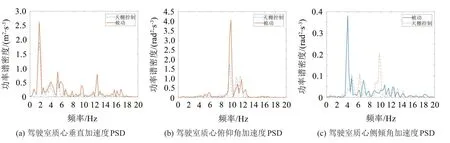
图6 时速为70 km/h驾驶室加速度功率谱
从图6可以看出,相比于被动悬架,提出的半主动悬置天棚阻尼控制在车身3自由度的加速度功率谱密度峰值均明显减小,低频共振区减震效果明显,随着频率(10 Hz)增大,侧倾角加速度反而出现恶化的现象,多数试验证明2自由度天棚阻尼控制在低频段减震效果明显,而在高频段隔振效果不理想甚至还有恶化的可能[15]。综合考虑驾驶室质心垂直、侧倾角、俯仰角加速度的控制效果,整车天棚阻尼控制算法,在低频区控制效果较好,而在中高频区控制效果不稳定。
4 结语
(1)传统的天棚阻尼控制或改进的天棚阻尼控制策略对2自由度1/4车模型的垂直振动有较好的效果,目前较多的整车天棚阻尼控制方法是将整车悬架模型看作是4个1/4悬架模型的组合,是以降低悬置点的加速度、速度和位移为目标的控制方法,而驾驶室悬置系统是一个多自由度耦合的系统;驾驶室天棚阻尼控制策略以简单的数学关系协调了4只减振器的作用力,从而更加全面地改善驾驶室质心的振动。
(2)利用ADAMS car/Simulink联合对重卡驾驶室天棚阻尼控制策略进行研究。仿真结果表明:在C级路面激励下,相比于被动悬架,天棚阻尼半主动悬置控制策略对驾驶室垂向振动、俯仰振动控制效果较为明显,其振幅及加速度均有较明显的改善,且在低频区控制效果较好,中高频区控制效果不稳定。