智能汽车非稳态纵向跟车行为滚动时域控制
2021-06-16朱向雷王英资
朱向雷,王英资,侯 珏,2
(1.中国汽车技术研究中心有限公司,天津 300300; 2.同济大学汽车学院,上海 201804)
0 引 言
汽车纵向跟车系统能够实时有效地控制自车车速和自车与前车的安全车距,是汽车实现智能辅助驾驶的首要系统之一,可以有效降低道路交通事故,其重要性不言而喻[1]。跟车系统涉及到的控制方法可以归纳为最优控制[2-3]、滑模变结构控制[4-6]、模糊神经网络控制[7-8]、滚动时域控制[9-10]、多模式切换控制[11-12]等。滚动时域控制又称模型预测控制,能有效解决多优化目标及约束问题,并能弥补模型失配、时变、干扰等引起的不确定性,成为近年来智能驾驶领域研究和应用的热点[13-14]。
汽车跟车过程包括稳态跟车和非稳态跟车,所谓非稳态跟车是指自车建立与前车安全车距的过程,因前车急加速或紧急制动等特殊工况的不可预知性以及前车突然进入雷达探测范围的突兀性等,使得非稳态跟车控制面临较大挑战。为提升智能汽车非稳态纵向跟车性能并避免与前车发生碰撞,研究一种针对非稳态跟车行为的滚动时域控制方法,建立考虑动态延迟的自车运动学模型,以误差向量为状态变量设计自车与前车纵向运动学关系模型,分析智能汽车非稳态跟车过程,基于跟车误差向量构建非稳态跟车行为最优控制问题,并将其推导为二次规划问题,然后通过一系列有限时域内带约束的滚动优化问题得到非稳态跟车行为状态反馈控制律,最后仿真验证可行性。
1 纵向跟车系统建模
图1所示为包含自车和前车的纵向跟车系统示意图,其中前车的位移、速度和加速度分别表示为xp、vp和ap,自车的位移、速度和加速度分别表示为xf、vf和af,自车与前车的实际车距为d,指定的期望车距为dsivd,车距误差e=d-dsivd。

图1 纵向跟车系统示意图
考虑自车的动态延迟,建立自车运动学模型

式中:af(t)——自车实际加速度;
af,des(t)——自车期望的控制加速度;
τ——表征车辆动态迟滞的时间常数,取τ=0.5 s。
同时,自车速度不能取负值,且加速度需满足非对称约束极限,即自车需满足约束条件

选取自车位移、速度和加速度为状态变量,将自车运动学模型用连续状态空间表示,即
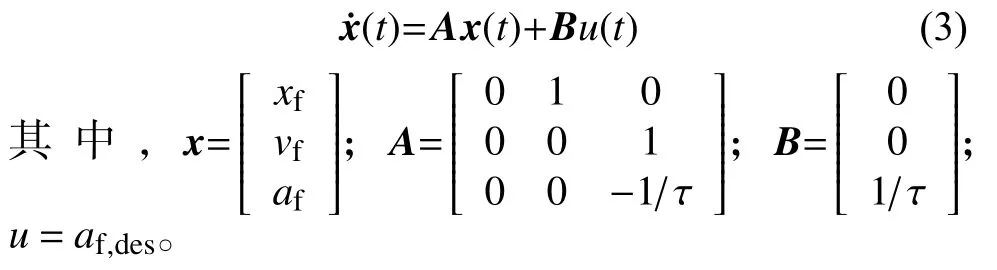
将式(3)写成以T为采样周期的离散形式

以车距误差、车速误差和自车加速度组成的误差向量为状态变量,描述自车与前车的关系,即


2 非稳态纵向跟车行为描述
2.1 跟车过程描述
自车确定与前车安全车距的过程称为非稳态跟车,这一过程需要两步:首先自车需要决策出从速度控制切换至距离控制的时刻,其次自车需要高效的控制算法将自车操纵至与前车保持指定的期望车距。自车与前车保持指定安全车距的过程称之为稳态跟车。
图2所示为相对车速与车距关系图,车距为负值意味着自车与前车发生碰撞,车速为负值则说明自车比前车速度快。图中包括车速控制、车距控制和驾驶员控制3种模式,自车通过比较相对车速和车距来选择控制模式,并决定模式切换时刻。非稳态跟车即为沿着车速控制和车距控制之间的分界线确定指定车距,即图中D点。
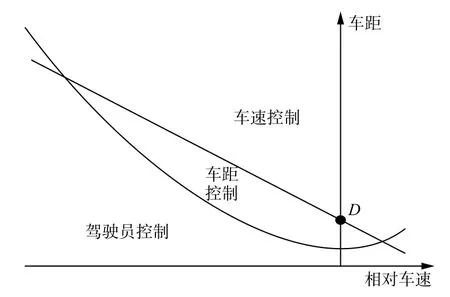
图2 相对车速与车距关系图
2.2 非稳态跟车初始条件
非稳态跟车的初始条件是指自车初遇前车并从速度控制模式进入非稳态跟车模式时的车距、相对车速、自车速度和自车加速度等参数值。若自车以最大的制动减速度从设定车速减速至前车车速而避免与前车发生碰撞,这是可行的。此时的最小制动车距由最大制动减速度决定。假定前车定速行驶,自车遇到前车时为车速保持模式。
连续状态空间式(3)的解表示为


由此可得

由于前车和自车初速度初始速度相同,最大减速度的初始条件仅决定于


图3所示为非稳态工况初始条件,给出了不同初始相对车速时实施最大制动减速度所需要的最小车距。若不满足此初始条件,一旦进入非稳态跟车则引起碰撞事故。
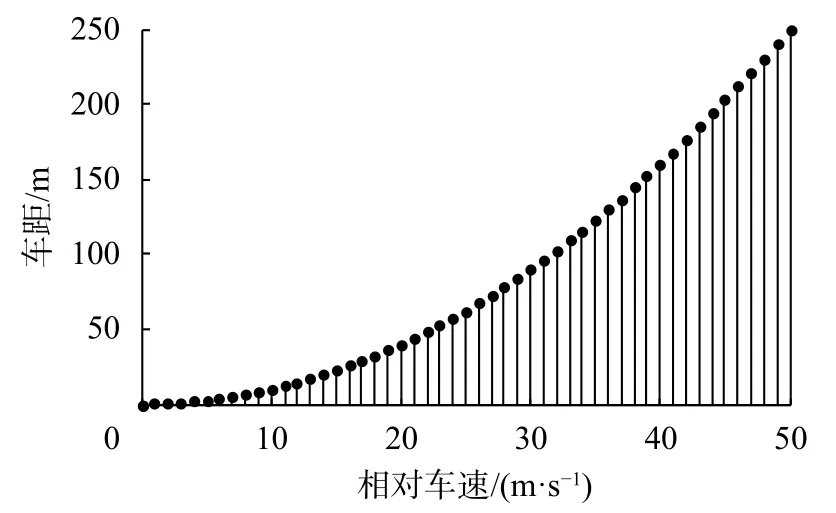
图3 非稳态工况初始条件
3 非稳态纵向跟车滚动时域控制
3.1 优化问题确立
基于跟车误差向量,纵向跟车问题可看作满足一定约束条件的最优控制问题,目标函数如下

1)跟车系统约束式(5)重写如下

2)状态量和控制量约束
3)终端约束

3.2 优化问题转化
上述优化问题无法直接求解,需将其进行转化。根据式(5),将误差向量写成误差向量初值 e(0)和控制序列的形式

进一步写成矩阵形式
首先,性能指标(15)式写成矩阵形式为

把式(21)代入式(22),得到

其次,状态约束式(17)写为矩阵形式

将式(21)代入式(24),得到

再次,控制量约束式(18)写为矩阵形式


最后,将式(20)代入终端约束式(19),得到

进一步将终端约束表示为等式约束形式,即

综上,得到二次规划问题的目标函数和约束条件

3.3 非稳态跟车控制律滚动时域求解
在每一采样时刻t,系统实时采集车距、相对车速、自车速度和加速度,更新指定的期望车距并计算误差向量e(t)。将e(t)作为初始条件,实现非稳态跟车滚动优化求解,即


其中,Nt为非稳态跟车所需要的时间。
滚动时域方法通过一系列有限时域内带约束的最优控制问题得到非稳态跟车状态反馈控制律。
4 结果验证
在Matlab/Simulink环境实现控制算法的仿真验证。为体现车辆非稳态跟车行为,设定前车存在先减速、后加速、最后匀速行驶等非稳态工况。将跟车控制结果与线性二次调节型(LQR)控制方法进行对比,为便于结果分析,LQR控制方法的结果用A1表示,本文提出控制方法的结果用A2表示。
图4为仿真结果,其中前车初速度为20 m/s,在6 s左右时减速至12 m/s,然后在12 s左右时又加速到20 m/s,之后一直保持匀速行驶。由图4(a)知,因自车初速度小于前车初速度,故自车先加速,之后因前车减速,自车车速出现一定超调波动,最终随前车的匀速行驶而进入稳态跟车阶段,与A1算法相比,A2算法对应的波动峰值较小,收敛速度较快。由图4(b)知,A1算法和A2算法最终都能控制车距趋于期望车距,但A2算法控制下的车距误差较小。
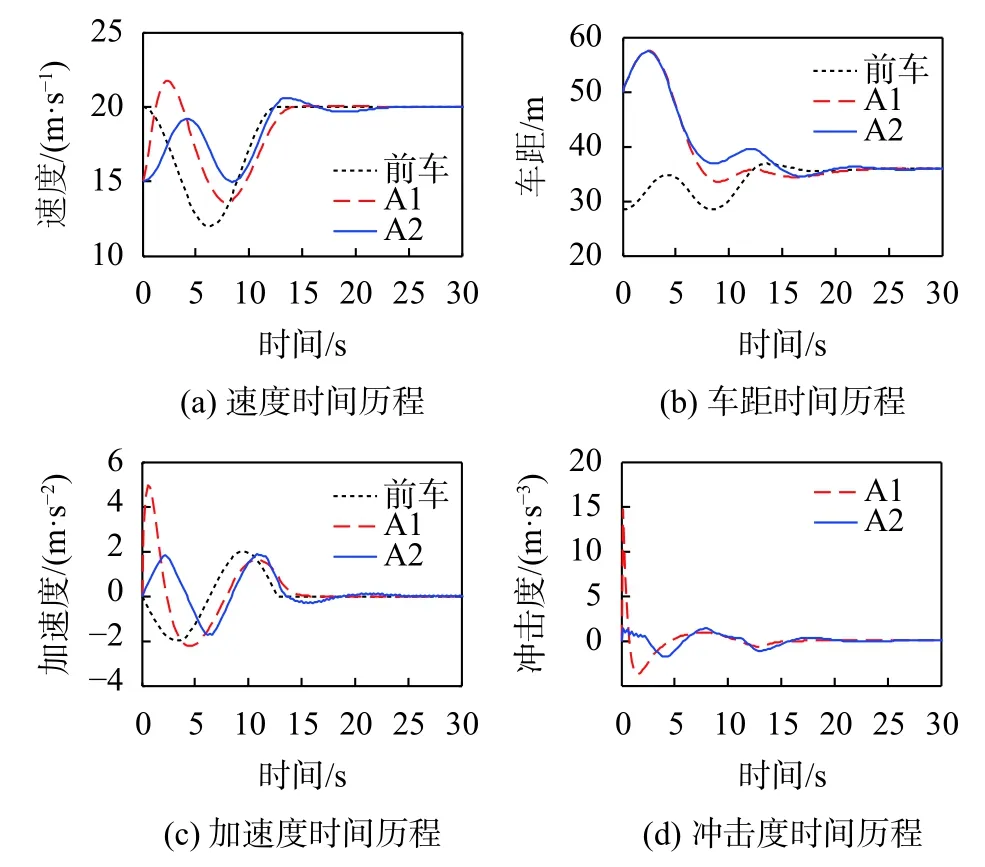
图4 仿真结果
由图4(c)知,在1 s时A1算法对应的加速度峰值达到5 m/s2,这源于A1算法无法对控制目标进行限制,而过大的加速度会给驾驶员带来强烈的不舒适感,违背非稳态跟车目的,本文所设计滚动时域控制算法A2可以实现较为平稳的跟车,加速度最大值没有超过2 m/s2,保证了车辆跟车的舒适性要求。由图4(d)知,A2算法能控制自车冲击度保持在较小范围内,而A1控制器下自车车冲击度在0.5 s左右甚至达到了15 m/s3,这严重影响非稳态跟车过程的舒适性。故与A1算法相比,A2算法控制下的加速度和冲击度峰值较小,收敛速度较快。
5 结束语
1)建立了考虑动态延迟的自车运动学模型,并以误差向量为状态变量建立自车与前车纵向运动学关系模型。
2)分析智能汽车非稳态跟车过程,并以解析形式给出非稳态跟车的可行性初始条件。
3)基于跟车误差向量构建非稳态跟车行为最优控制问题,并将其推导为二次规划问题,通过一系列有限时域内带约束的滚动优化问题得到非稳态跟车行为状态反馈控制律。
4)结果表明,所设计的非稳态跟车控制方法能够有效控制自车速度和加速度,快速收敛至指定车距实现稳态跟车。
