基于DGPS物流车辆联网技术研究
2021-06-16蔡居昊
蔡居昊
(宁波工程学院,浙江宁波,315211)
0 简述
目前,大型工厂存在大量物料搬运及调度配送工作,需要大量铲车、叉车等物流车辆以及配备司机,由于车辆、司机、需求端信息不畅通,物流调度不及时、调度路线长油耗高、安全风险高、车辆闲置、运维成本高等问题,急需开展将车辆、司机及物料等信息联网和管控,提高效率和节约成本。车辆联网、高精度定位及高效化调度成为热点[1],大量文献主要围绕自动化驾驶展开高精度定位[2-3],本文基于北斗定位针对大型工厂车辆进行联网调度,其厂区地图缺乏精细化电子化地图,缺少相应标准,厂区道路和配送路线也是不规则和复杂,本文通过信息化、大数据及智能技术的有效融合,实现了车辆、司机与用户需求信息的智能关联和互联互通,实现了对流动状态车辆的动态监控,解决了车辆故障问题追踪难、车辆利用率低、企业资源消耗高等难题,大幅度提升了厂区物流车辆的管理便利和使用效率。
1 主要研究内容
■1.1 地图电子化
目前,在普通地图上,一般场区范围几乎为空白(如图1 某船厂厂区地图),场区内道路及各类厂房建筑等均无明显标识,难以实现车辆的精确调度。通过对场区航拍图片叠加,形成厂区范围内平面图,实现厂区内的车辆监管直观化,叠加后的图片可随着地图放大而放大,满足不同区域车辆的精细化管控。本文采用GIS矢量地图叠加绘制技术,即场区高精度地图与GIS地图融合,通过场区图进行的优化改进,并叠加到地图上,实现了场区元素在地图上的直观展示,并可与地图同步缩放,为场区车辆调度和实时监管提供了后台保障。

图1 某制造厂厂区地图
GIS地理信息租用高德Mapabc地图和高性能栅格地图引擎,支持地图在线更新。GIS地图主要支持功能:地图缩放:系统提供对地图的缩放功能,用户可以通过地方缩放实现对地图全局状况监控和局部状况监控。地图漫游:系统支持地图漫游功能,用户可随时动地图到需要观察的区域。地图搜索:Mapabc 地图服务平台为用户提供各种搜索服务,包括兴趣点查询、道路查询、城市代码查询、区域查询等,全方位的满足将来扩展的搜索需求。海量对象信息叠加:GIS地图支持在地图上叠加海量的对象信息,叠加海量对象信息后,可实现海量对象的平滑移动在地图上清晰显示。矢量信息叠加:GIS地图支持区域、线路、点和文字等矢量元素叠加功能,矢量图形能够随地图平滑移动而移动,支持半透明模式。
■1.2 车辆高精度定位技术
车辆的高精度定位是本文研究的重点,直接影响到车辆精准的调度,本文采用北斗车载设备实时差分精定位技术。关于定位要求,本项目有二个主要关注点:一是定位频度高,二是定位精度要求到达3~5米,如图2所示。对于普通的GPS定位或北斗终端定位,其精度约10米左右。考虑现场车辆定位精度要求,采用车载北斗实时差分精确定位技术实现高精度定位需求。
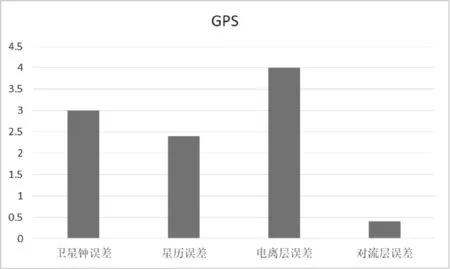
图2 传统GPS误差
本项目考虑到车辆物料调度,由车辆、司机、场地及取料相对位置精准性对智能化物流调度极为关键,对其动态行驶位置精度要求较高,为智能化无人化调度奠定基础,由于大气层的延迟误差、卫星星历误差、卫星钟误差等误差干扰导致定位提出调整挑战,为了进一步提高定位精度,本项目采用伪距差分(RTD)的方式来提高定位精度,在基准站上的接收机要求得它至可见卫星的距离,并将此计算出的距离与含有误差的测量值加以比较,并求出其偏差。然后将所有卫星的测距误差传输给用户。用户利用改正后的伪距来解出本身的位置, 就可消去卫星钟误差、星历误差、电离层误差、对流层误差等公共误差,其定位精度能够达到亚米级,如图3所示。
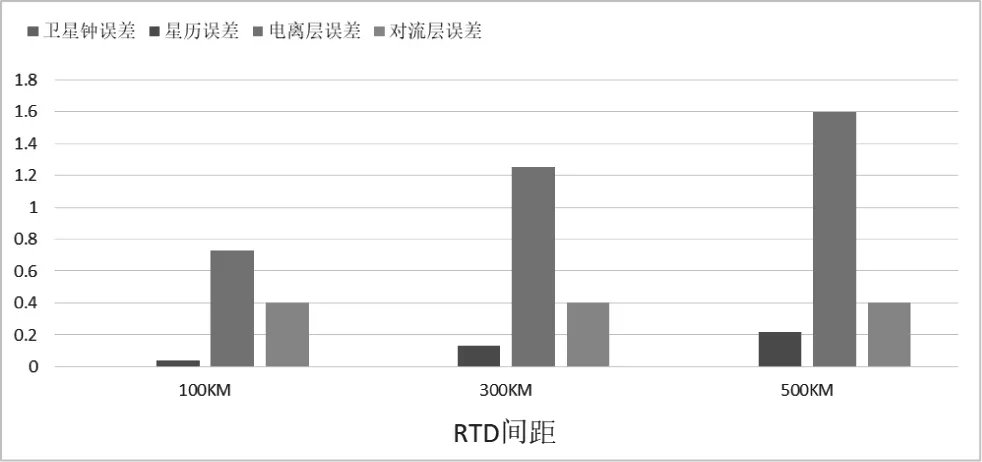
图3 不同RTD间距的定位精度(误差单位:m)
在每辆车上安装定位车载终端,高精度车载终端在接收到卫星GPS信号后,可接入地面北斗的基准站,进行卫星定位数据解算,实现高精度差分定位。同时车载终端可通过通讯模块实时向云端监控中心上传传输定位信息及其他传感器的数据,实现实时对车辆状态进行监控及调度管理。本项目采取高精度的差分全球卫星定位系统DGPS,即在传统的GPS技术基础之上利用差分技术,能够从GPS系统中获得更高的定位精度。如图4所示,本项目在场地设置北斗GPS基准站,并车辆用户同时进行 GPS 观测,将得到的移动定位的结果与基准站坐标比较,可求解出实时差分值,并以数据链传输方式,将差分修正值立即反馈给GPS用户,从而修正GPS定位值,从而获得车辆高精度的米级定位。

图4 车辆DGPS高精度定位原理
■1.3 网络通讯
车载终端按设定间隔定期检测GPS/北斗定位信息,以及对车辆发动机工作状态信息进行采集,通过3G/4G无线网络上报至车辆联网监控调度平台。数据平台进行数据的入库和分析处理后,输出至到监控中心、司机和用户手机APP等;手机客户端通过无线网络,接入车辆联网监控平台,如图5所示。

图5 基于北斗车辆联网架构图
车联网通信服务器的软件采用Java开发平台,主要包括前后置通讯服务器,前置通讯服务器面向作业车辆的司机手机APP,将所有转发的GPS信息进行汇总并发送到后置通讯服务器中,同时将调度发送过来数据分发到各用户智能手机APP。后置通讯服务器负责数据存储,并将数据转发到各监控客户端。通信服务器软件数据分析处理模块实时从GPS数据队列中获取数据,并根据数据已有基础数据、历史GPS数据进行分析处理。主要涉及到数据有效性分析、区域分析、手机APP长时间不在线分析等处理分析功能,获取高精度定位精度。
由监控中心进行车辆位置、车辆工作状态(工作、待机、停止工作)、车辆历史路线、工作时间进行监控,对车辆司机、呼叫车辆用户、监控中心集中调度人员在一个平台管控,实现车辆区域化管理和就近原则管理,大幅度提升车辆调度效率。
2 结论
(1)基于DGPS北斗差分GPS定位实现了工厂车辆高精度定位1m范围;(2)采用GIS矢量叠加地图实现了大型厂区高清可视化;(3)通过工业互联网、车载、手机APP实现车辆调度管理。
