基于机器视觉的工业机器人分拣控制系统探究
2021-06-16储琴
储琴
(常州工程职业技术学院,江苏常州,213164)
0 引言
机器视觉技术是指使用摄像机和计算机来模拟人类视觉功能,并且广泛用于航空航天、汽车零件、电子、制药等领域。在我国,机器视觉技术的研究起步较晚,不够成熟,其专利和成果不及国外品牌。工作分拣在整个工业生产过程中占有重要地位,工业分拣的速度将直接影响整个分类过程的运作。因此,我们需要先对工业分类的各个步骤进行测试,找出不足之处并加以纠正,以提高整个工业分拣技术,这对分拣行业具有重要的指导意义。据调查,在过去的一年中,中国连续增加了200多家加工工业机器人制造商。并且,业界非常看重工业机器人的市场发展前景,他们一致认为工业机器人生产的“高潮”将在未来几年出现。
1 工件机器人分拣系统的系统硬件
机器视觉工件分类系统分为三个,而工业机器人分拣系统主要分为五个主要单元:工件传送单元、相机平台单元、视觉分类单元、机器人RC控制单元以及机械手抓取单元。包括步进电机、图像采集卡、气爪、工控机、运动控制卡、三轴运动平台这些部分。运动卡的通信通过以太网和RS232串口实现。工控机是信息处理和操作中心,负贵控制与协调,其他部分挂在工控机下。框架图如图1所示。
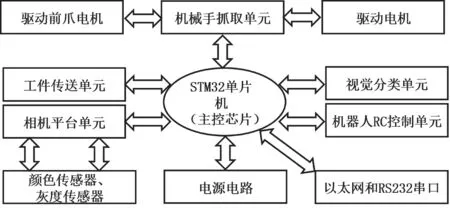
图1 分拣机器人总体框架图
■1.1 工业相机的选择
图像采集是整个视觉系统的基石,它主要是通过工业摄像机完成的。作为机器视觉系统的核心组件,工业相机的基本功能是将输入的光信号转换输出为电信号。所拍摄图像的质量、清晰度、系统稳定性都由相机的性能直接决定。与普通相机相比,工业相机具有超强的传输功能、更高的稳定性和更强的抗干扰能力。本系统选择高分辨率数码相机MV-1300UM,其参数为:传感器类型:逐行数字面阵CMOS,输出颜色:黑白,信噪比> 45db,动态范围:60db,电源要求:5V,功耗<2.25W,尺寸53×54×54,分辨率1280×1024,帧频15FPS,像素大小:5.2μm×5.2μm,视野(FOV)为64mm×48mm,物距是128.3mm,畸变<0.07%,光栅分辨率是0.4μm,精度是±5μm。
■1.2 光源的选择
系统中光源的功能是将光投射到被检测对象上,并在完成投射后区分对象的对比度。好的光源可以提高整个系统的分辨率,并降低后续图像处理的压力;而性能较差的光源则会降低系统的工作效率,例如工业相机过度曝光会导致图像不清晰。本系统选取的是采用led按圆周排列的灯光,它能够为被测物体提供大面积平衡照明的环形光源,其优点是可以直接安装在镜头并实现大面积的照明,能够较好的反射被测物体表面的纹理。
■1.3 分拣机器人的选择
视觉分类系统的核心组成部分是工业机器人。分拣系统的分拣速度上限、系统准确性、稳定性和可靠性都由工业机器人的性能决定,其类型包括:切割机器人、搬运机器人、焊接机器人、喷涂机器人、分拣机器人等。由于每个机器人的用途不同,因此在选择机器人时需要注意其工作性能的差异。例如,分拣机器人可以快速、准确地掌握要测量的移动目标,更适合分拣;搬运机器人的承载能力较大,可以负载很重的物品。经过筛选,我们采用ABB IRB360工业机器人。
■1.4 车轮驱动方式的选择
对分拣系统进行需求分析,在设计中应该提高小车运动及转向控制的精度。因此,当为小车车轮选择驱动马达的类型时,经过一系列的对比分析发现,尽管直流电动机驱动简单方便,但精度较差,而且在工作时难以精确控制小车的转向;相比之下,根据系统设定好的输入脉冲,步进电机能够控制小车转向的角度,该方法不仅实用易控制,同时与该系统匹配程度较高,且成本也较低,只是精度要求仍然不够。该系统对伺服电机的控制相比较前两种电机而言更加复杂,但能够实时检测电机速度,也可以达到控制精度的要求。因此,选择PARALLAX型伺服电动机作为机器人前轮的驱动电动机,并且机器人的后轮采用随动的万向轮驱动,以达到平衡效果。
■1.5 颜色识别方案的选择
机器人要处理的材料具有绿色、白色、红色、黑色和蓝色五种颜色。因此,准确识别材料的颜色非常重要。任何颜色都由红色,蓝色和绿色三种原色按不同比例组成,因此可以根据每种颜色中红色,蓝色和绿色的比例来区分材料的颜色。在设计中,通过选择TCS230颜色传感器来实现。TCS230可以在不进行ADC转换的情况下,实现每个颜色通道超过10位的分辨率,并且它还包含硅光电二极管阵列(可通过编程进行配置)和电流/频率转换。TCS230传感器的光响应范围是250~1,输出频率为2 Hz~500 kHz,与光强度呈线性关系,波形为占空50%的方波。通过程序,用户可以选择频率输出比。TCS230的输出输入引脚可以直接连接到单个白色、红色、黑色、蓝色和绿色ABCDEFG片机或其他逻辑电路。能够输出特定的原色,测量被测物体所含红色、蓝色和绿色的成分比例,通过对引脚输入信号的控制进行编程,来调整滤镜的颜色。
2 机器人分拣控制系统的实现
■2.1 机器人运行范围
在设计中,需要智能机器人在指定区域中移动。指定的字段如图2所示,机器人运行范围:圆的直径为320mm,线宽为20 mm。需要运输5种不同颜色的材料。首先,需要在图块放置的初始位置随机选择3个不同颜色的图块,并将图块放在图2所示的内圆和辅助线的交点A,C和E上,然后将它们依次标记为A、B、C、D、E;其次将剩余的2个图块放在图2所示的外圆线F和G上,最后将输送的物料按A,B,C,D,E的顺序放入物料位置。环位分数线有50%灰度和2 mm线宽的细线,从内部到外部有10个分数值,分别对应10环到1环。颜色标签从左到右分别用绿色、白色、红色、黑色、蓝色对圆进行填充;现场线宽为20 mm的黑线可用作跟踪辅助线。此外,该机器人不使用跟踪方法时依旧能够进行分拣和运输。

图2 机器人运行范围示意图
■2.2 机器人分拣控制系统的实现
(1)相机标定
分拣技术的首要工作便是相机标定,同时也是机器视觉的基本组成部分。如果缺少摄像机校准,则无法实现机器人的机器视觉。在机器人分拣技术中,相机标定的功能是建立物体图像的坐标系,并根据空间位置坐标系将其连接起来,以建立两者之间的对应关系。在相机标定的作用下,机器人分拣系统能够准确判断物体所在坐标系的位置,为抓取工作做好前期工作。
(2)目标识别
目标识别是根据需要捕获图像中项目的特征,即目标提取或图像分割。在基本定位中,提取土图像中的目标特征或者某些特征。目标提取方法有多种形式,例如边缘检测、区域提取和阈值分割。目标提取完毕后进行目标分割,并对项目特征进行分类和统计。
(3)目标分拣
对于运动目标的跟踪和记录,可以使用多目标跟踪方法。对提取的图像序列进行逐帧分析。在图像的每一帧中检测运动目标,并判断图像的每一帧中需要识别的像素类型,然后建立目标链。在判断物品的过程中,利用物体和机器人独立坐标系建立相互联系,在分类工作中完成物品位置的相应工作。
(4)操作原理
在接收到信号后,工业机器人的工作方式实际上是进行系统控制。首先,系统要在工业机器人和计算机之间建立公共信号通道,然后在计算机设定程序的帮助下控制机器人的运行路线。工业机器人整个系统的控制过程为:一,由工业机器人抓取待分类的物料,并将其放在系统确定的对象放置槽里;二,系统记录对应于每个工件的空间坐标的全局总变量;三、使用软件编程语言(这里选择计算机的VC ++ 6.0系统)来编写机器人控制程序软件,然后控制工业机器人进行分拣操作。
在分拣机器人的控制系统中使用了许多接近传感器,其通过接口电路连接到单片机引脚。在操作过程中,通过读取这些传感器检测到的信息,就能查看到分拣机器人的工作状态。这些接近传感器只有两种模式:未触发时的高电平模式和触发时的低电平模式,因此,我们只需要读取相应引脚的电平。分拣机器人的控制程序流程如图3所示。具体来说,为了确保其正常运行,在分拣机器人启动后,首先会进行网络连接状态、机械臂复位和转盘复位等方面的自我检查。在确保自检正确后,机器人将从起点开始,到达识别区域后启动机器视觉模块来识别物件。成功识别快递物品后,机械手将其放入转盘,然后分拣机器人将对象运输到倾卸区,最后返回识别区。直到目标对象分拣完成后,该循环才会停止运行。

图3 分拣机器人控制程序流程图
3 结语
由于经济的飞速发展,在我国越来越多的行业开始运用机器人进行生产,例如:农业、工业、食品加工业、汽车业等。各个行业也都开发出了一套针对工作需要的特定的机器人技术。在生产生活中,机器人发挥了巨大的作用,在相当程度上增加了该行业的生产效率,从而推动了社会经济的发展。从另一个角度来说,机器人分拣技术的研究也推动了机器人研究工作的进步,促进了机器人研究事业的发展。
