双直线电机TSKRFNN交叉耦合同步控制研究
2021-06-09吴有明方昱璋
吴有明,方昱璋
(1.南宁职业技术学院机电工程学院,广西 南宁 530008;2.国网甘肃省电力公司经济技术研究院,甘肃 兰州 730050)
随着对高速度高精度镗铣加工技术的要求越来越高,通常需要对大型零件和复杂的几何型面进行高精密加工[1-2]。移动式龙门镗铣床克服了传统固定式镗铣床受工作地点约束、体积重量大的缺点,在多电机协同系统中受到更大的关注。移动式龙门镗铣床加工机构需要由两台完全相同且相互平行的永磁直线同步电动机(per⁃manent magnet linear synchronous motor,PMLSM)构成,尽管安装在X轴的两台电机具有相同的结构与参数,但在PMLSM加工制造过程中难免会出现结构上的细微差异,以及在两台PMLSM运行过程中受参数变化、外部扰动等不确定性因素的影响,都会造成系统控制性能降低[3]。另外,在机床实际运行过程中,加在工作台上的负载质量变化,也会导致两台PMLSM之间存在受力不平衡的现象,致使两个PMLSM子系统输出不同步,从而产生同步误差[4]。
为提高双直线电机伺服系统的同步跟踪精度,国内外学者进行了深入的研究,主要研究方向为提高单轴PMLSM跟踪精度和双电机同步精度两方面[5]。文献[6]采用自演概率模糊神经网络解决PMLSM中存在的时变不确定性问题,通过结构学习和参数学习训练网络参数,保证系统的鲁棒性,但该方法的稳定性证明十分复杂。文献[7]针对加工中心双直线电机系统设计了自适应模糊滑模控制器,保证了系统的跟踪性,但其单轴PMLSM子系统仅采用PI控制器,性能有待提高。文献[8]将积分滑模控制应用于双永磁同步电机中,解决了电机受负载扰动而转速不同步的问题,但其采用的积分滑模控制仍存在抖振现象。
因此,为提高龙门镗铣床加工中双直线电机伺服系统的同步跟踪精度,采用一种TSK型递归模糊神经网络(TSK-type recurrent fuzzy neural network,TSKRFNN)与交叉耦合控制器(crosscoupled control,CCC)相结合的控制方法。该方法充分考虑了双直线电机伺服系统的特点,分别从单轴和双轴两方面提高系统性能。利用TSKRFNN提高系统鲁棒性,同时利用CCC消除机械耦合引起的同步误差。实验结果表明,该方法有效地提高了双直线电机的同步运行精度,适于应用在同步控制中。
1 PMLSM数学模型
由于两台PMLSM完全相同,因此,仅以一台PMLSM为例建立数学模型。PMLSM的简化电磁推力方程为

Kfi=3πnpiλPMi/2τi
式中:Fei为PMLSMi的电磁推力,i=1,2;Kfi为电磁推力系数;npi为极对数;λPMi为磁链;τi为极距;iqi为q轴电流。
根据系统的动力学模型,可将PMLSM的电磁推力方程表示为

式中:Mi为转子的质量;vi为转子的线速度;vi为速度的微分,即转子加速度;Bi为粘性摩擦系数;FLi为总不确定性因素,包括参数变化、外部扰动以及摩擦力等。
2 基于TSKRFNN的双直线电机交叉耦合控制系统设计
针对双直线电机系统易受不确定性因素的影响,且系统运行过程中由于负载力的变化以及环境的变化等会存在参数不匹配、不平衡力等耦合问题,采用基于TSKRFNN的双直线电机CCC方法以解决以上问题。基于TSKRFNN的双直线电机CCC方法系统总框图如图1所示。从图中可以看出,两台PMLSM采用并行控制方式,对两台电机输入相同的位置给定信号,同时每个轴均采用相同的传感器装置、伺服驱动器等组成的控制回路。
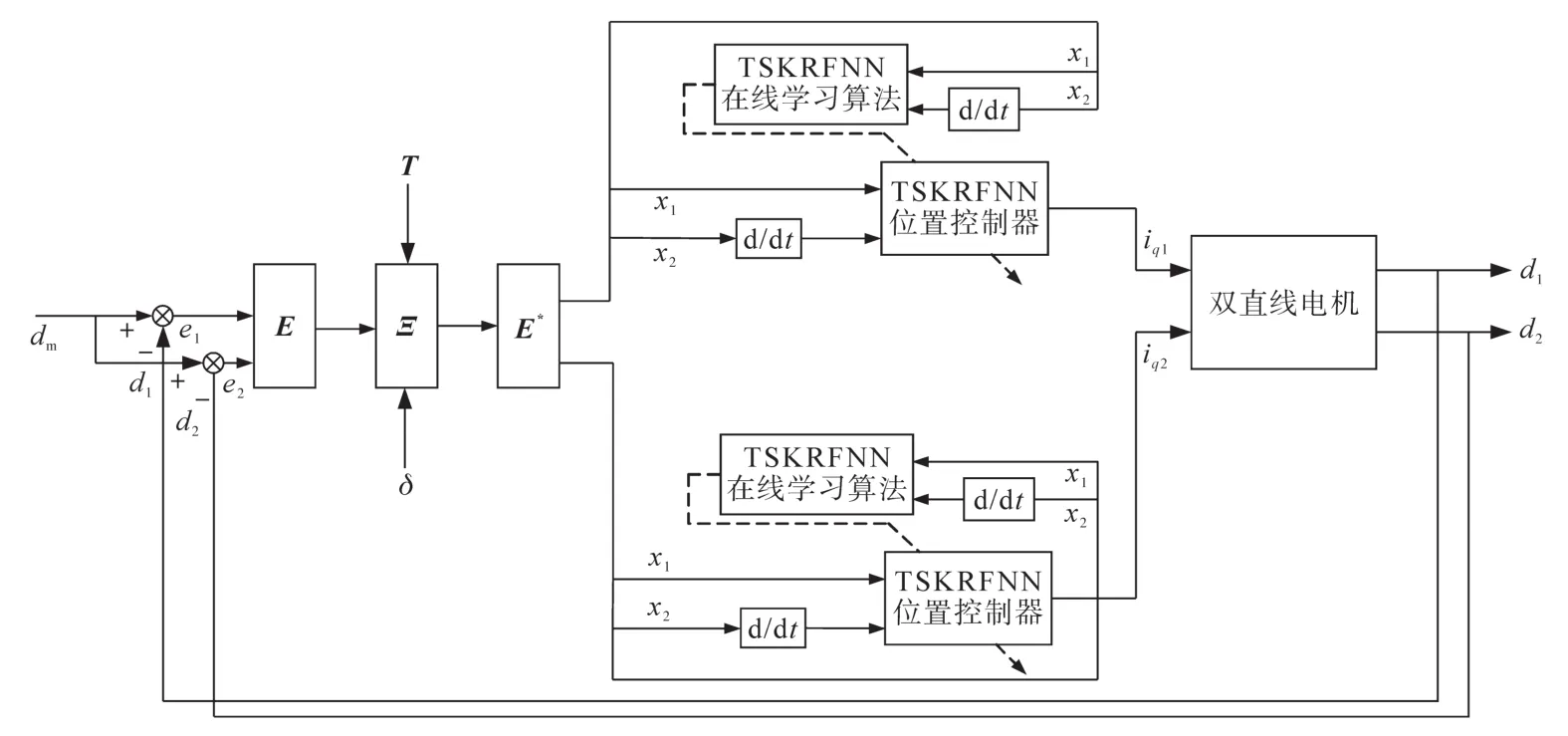
图1 基于TSKRFNN的双直线电机CCC方法系统总框图Fig.1 Block diagram of dual linear motor based on TSKRFNN and CCC
2.1 CCC设计
采用CCC方法消除双轴之间存在的同步误差,CCC方法能够将两个子系统产生的单轴位置跟踪误差按照一定比例分配到两轴中,从而达到平衡。首先,定义单轴PMLSM跟踪误差为

式中:ei为两台电机的位置跟踪误差;dm为直线电机给定位置;di为实际位置。
为减小同步误差,需找到同步误差与单轴位置跟踪误差之间的关系。定义两轴间同步误差为

式中:ε1,ε2为双直线电机的同步误差,也就是两台PMLSM的跟踪误差的差值。
为方便分析控制器的设计,将式(4)表示为
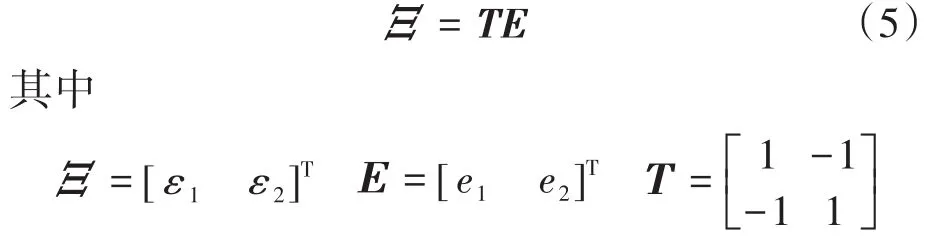
为同时减小两台PMLSM的跟踪误差和同步误差,得出两者间关系为

式中:E*为耦合误差,E*=[x1x2]T;δ为耦合参数,δ>0。
将式(5)代入式(6)得:

式中:I为单位矩阵;(I+δT)为正定矩阵。
2.2 TSKRFNN设计
龙门镗铣加工中心X轴由两台PMLSM直接驱动,而PMLSM取消了齿轮、丝杠等中间传动装置,因此极易受到参数变化、外部扰动等不确定性的影响,不确定性的存在使PMLSM精准数学模型的建立十分困难。由于神经网络具有强大的学习能力,且不依赖于精准数学模型,因此引入TSKRFNN对不确定性进行估计并补偿。TSKRFNN将模糊控制策略与神经网络算法的优点结合起来,具有较强的自学习和联想功能,能够有效提升双直线电机的伺服性能[9]。设计TSK型模糊神经网络的第j条模糊规则为
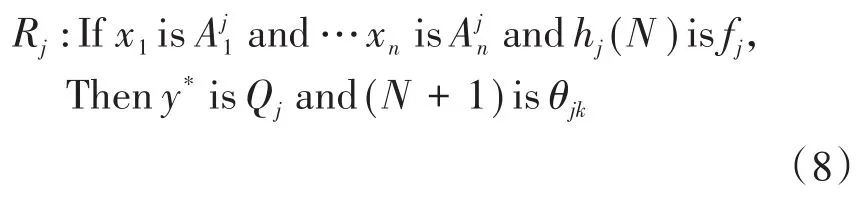
图2为TSKRFNN的结构框图。
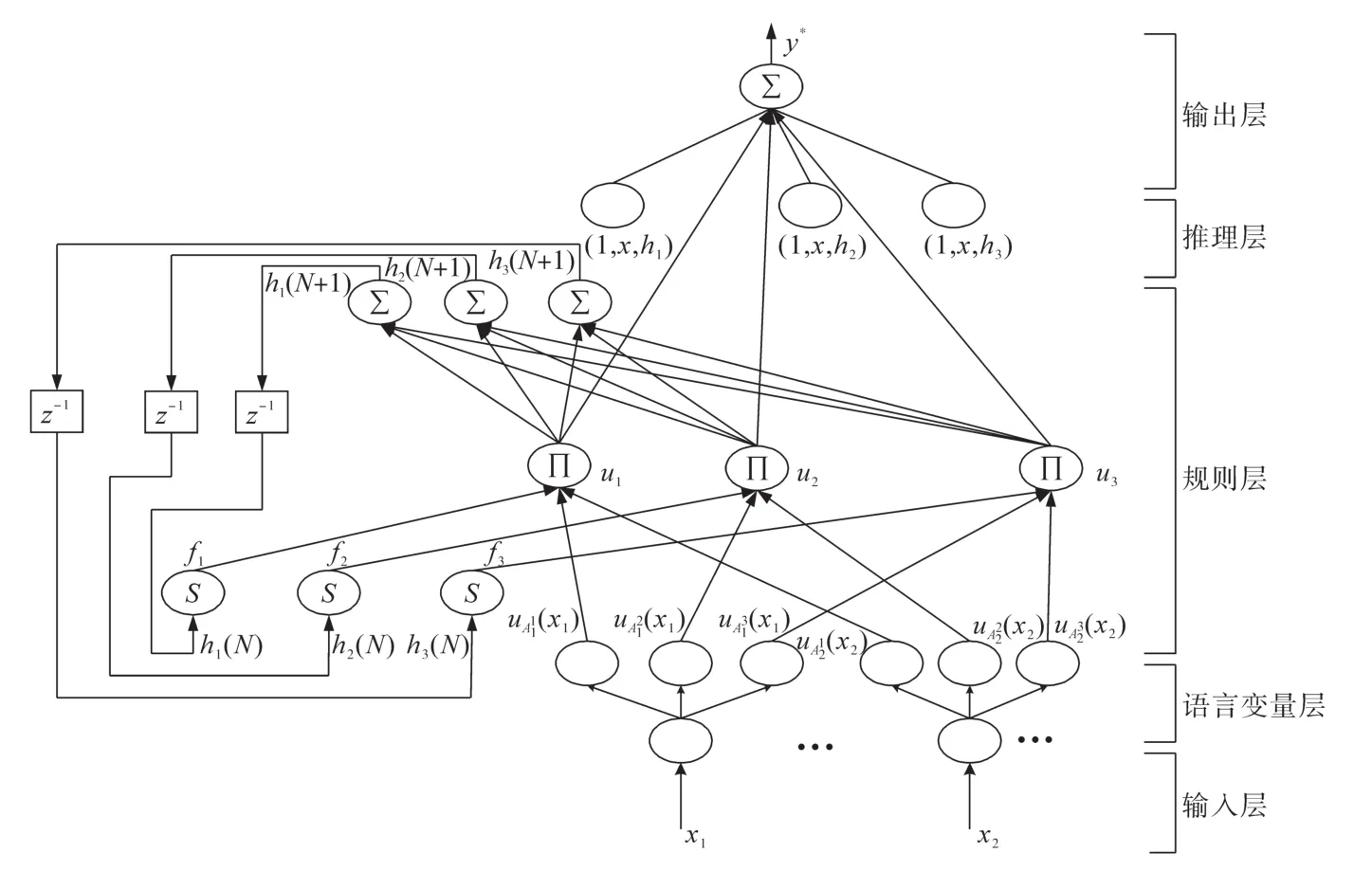
图2 TSKRFNN结构框图Fig.2 Structure diagram of TSKRFNN
每层网络具体介绍如下:
1)输入层:TSKRFNN为双输入神经网络。耦合误差x1和耦合误差的微分x2作为网络的输入。
2)语言变量层:此层中隶属函数选取高斯型函数,表示为

式中:mij,σij分别为与第i个输入变量相关的第j个节点的高斯函数的平均值和标准差,i=1,…,n。
3)规则层:将内部变量hk以S型隶属函数的形式可以描述为
式中:hj为递归单元;θjk为递归权重。
第f条规则的节点可表示为
4)推理层:本层中节点采用线性加和的方式进行传播。节点j描述为
式中:aij为可以调整的参数值,i=0,1,…,n+1。
5)输出层:此层输出信号y*表示为
定义能量函数V为

TSKRFNN可以对双直线电机系统中存在的不确定性因素的值进行估计,同时根据估计值对网络中参数进行在线调整。TSKRFNN可以利用一定的规则进行参数优化,具体描述如下:
1)输出层:该层中的误差描述为
2)推理层:该层中的误差描述为

3)规则层:该层中的误差描述为
4)语言变量层:该层中的误差描述为
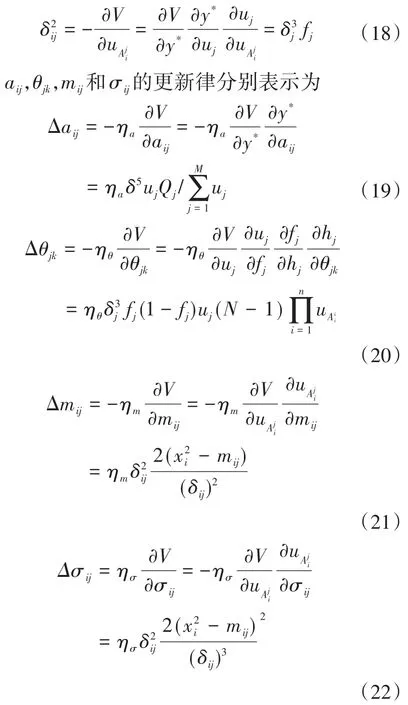
式中:ηa,ηθ,ηm,ησ分别为连接权重、递归权重、平均量和标准偏差量的学习速率。
隶属度函数和权重的平均量及标准偏差量优化为
3 实验结果及分析
本系统利用DSP作为控制核心,对系统进行实验。实验中所选用电机如图3所示。实验中所选PMLSM 参数为:M=5.8 kg,B=2 N·s/m,Kf=10.97 N/A。TSKRFNN中选取网络参数为:ηa=1.25,ηθ=0.17,ηm=0.34,ησ=0.05。
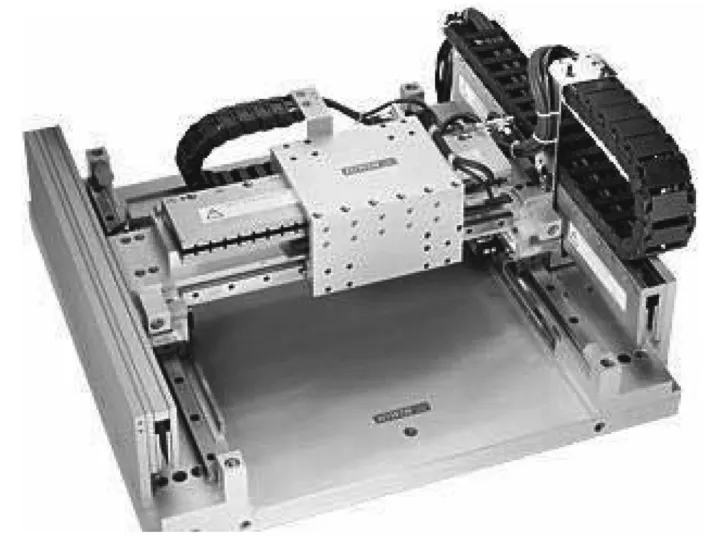
图3 实验装置Fig.3 Experimental sutup
为验证所提出的TSKRFNN双直线电机CCC方法的有效性,在参数变化(实际质量M1=2M,实际粘滞摩擦系数B1=1.5B)的情况下对双直线电机伺服系统给定如图4所示的梯形位置信号。两台电机在TSKRFNN控制和TSKRFNN+CCC控制下的位置响应曲线、跟踪误差曲线和电流曲线分别如图4~图7所示,且两种控制方法下的同步误差曲线如图8和图9所示。对比曲线可以看出,在仅有TSKRFNN控制时,两台电机的位置跟踪误差均较大,从而导致同步误差约在-1.5~1.5 μm之间波动。而在TSKRFNN+CCC控制下,两台电机的位置跟踪误差和同步误差均得到了改善,同步误差约为-0.7~0.7 μm。因此,针对含有不确定性和耦合问题的双直线电机系统,所提方法能够有效减小跟踪误差和同步误差,提高同步控制精度。
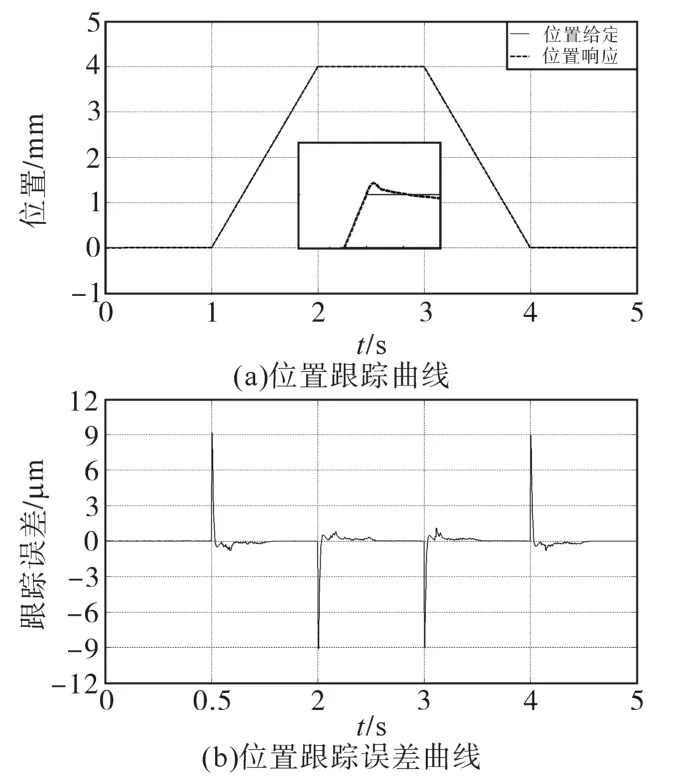
图4 基于TSKRFNN的PMLSM1位置响应曲线Fig.4 Position response curves of PMLSM1based on TSKRFNN
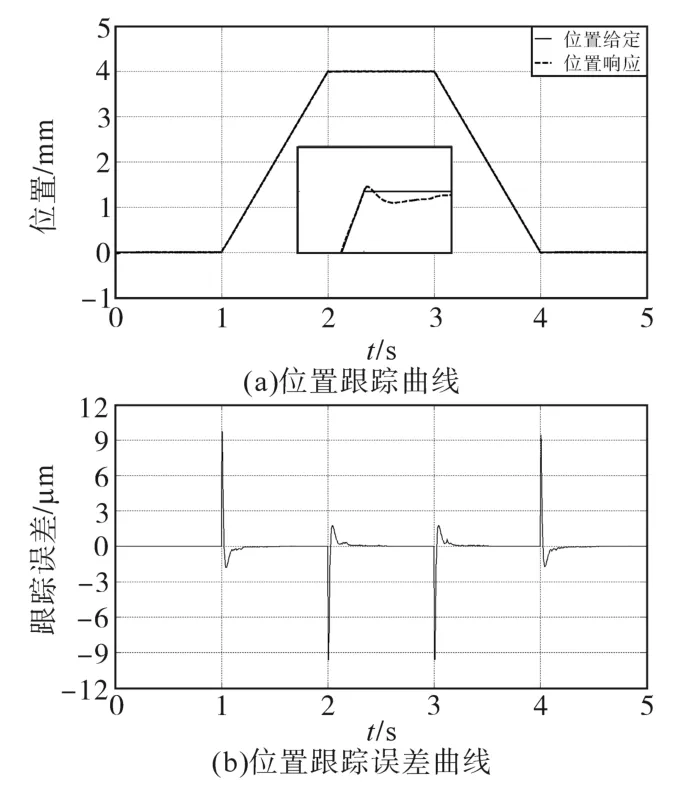
图5 基于TSKRFNN的PMLSM2位置响应曲线Fig.5 Position response curves of PMLSM2based on TSKRFNN
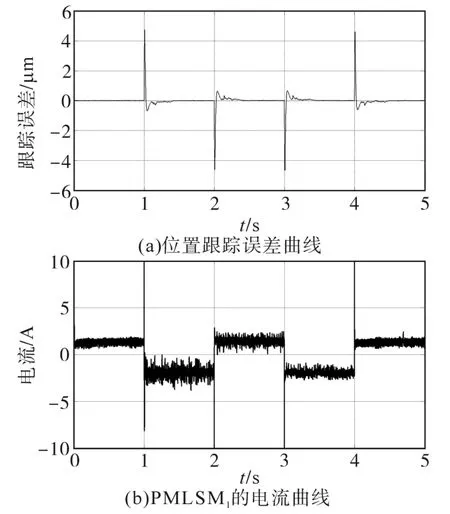
图6 基于TSKRFNN+CCC的PMLSM1位置跟踪误差曲线及电流曲线Fig.6 Position tracking error and current curves of PMLSM1based on TSKRFNN+CCC
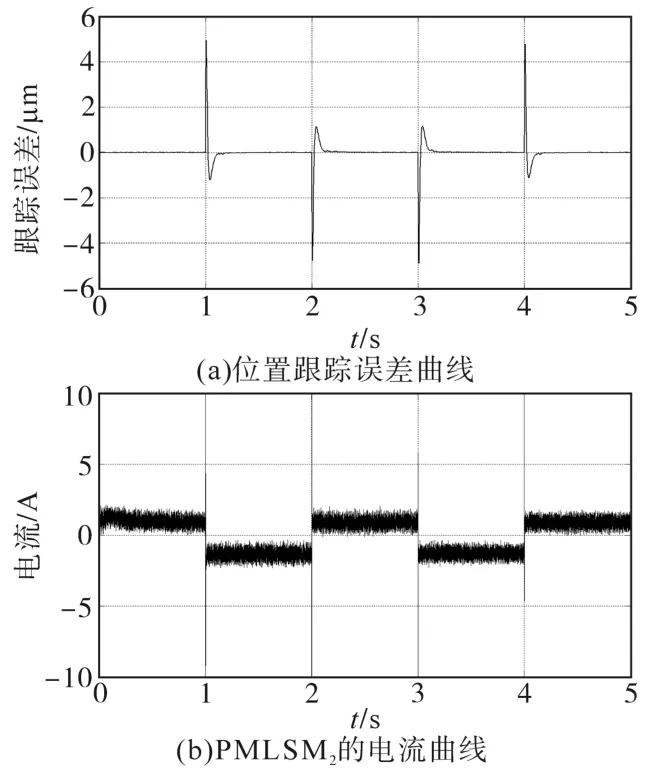
图7 基于TSKRFNN+CCC的PMLSM2位置跟踪误差曲线及电流曲线Fig.7 Position tracking error and current curves of PMLSM2based on TSKRFNN+CCC
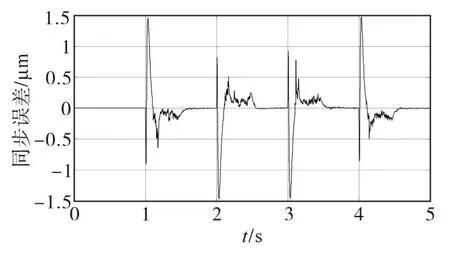
图8 基于TSKRFNN的双直线电机伺服系统位置跟踪误差及同步误差曲线图Fig.8 Position tracking error and synchronization error curves of dual linear motor servo system based on TSKRFNN
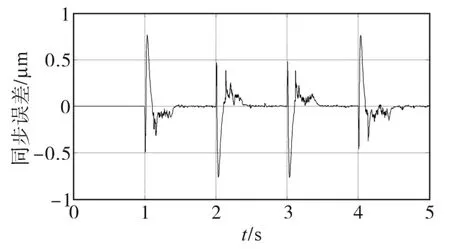
图9 基于TSKRFNN+CCC的双直线电机伺服系统位置跟踪误差及同步误差曲线图Fig.9 Position tracking error and synchronization error curves of dual linear motor servo system based on TSKRFNN+CCC
4 结论
针对双直线电机中存在不确定性以及耦合现象的问题,提出一种TSKRFNN与交叉耦合控制相结合的同步控制方法。利用TSKRFNN强大的自学习能力,估计系统中不确定性并在线调整网络参数,保证单轴PMLSM伺服系统的控制性能。同时,将交叉耦合控制方法加入到双直线电机系统中以解决系统中存在的参数不匹配等耦合问题。仿真结果表明,该方法可极大地减小不确定性因素对系统的影响,从而实现双直线电机伺服系统的精准位置控制。
