柔性三维力传感器的研究进展
2021-06-04王孝飞张齐峰李玉霞黄梁松
王孝飞,张 鹏,张齐峰,李玉霞,黄梁松
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
当今,移动互联网与智能技术的迅速发展使得柔性电子设备的需求出现巨大的缺口。其中柔性电子设备最关键的部件——柔性传感器[1],成为了众多研究者们的关注课题。柔性传感器在医疗[2-5]、机器人[6-8]、环境监测[9]、农业生产[10]、军工[11]等领域具有非常好的应用前景。目前,在柔性传感器的研究成果中多数是对法向力[12-18]实现检测,然而绝大多数的应用场景中不仅要求法向力的检测,还要求剪切力的检测[19]。因此,开发柔性三维力传感器成为柔性传感器研究领域的热点。如今,柔性三维力传感器已经在不同领域中应用,如研究人员通过检测足底三维力的分布,帮助了残疾人康复治疗及专业运动员矫正动作[20];研究者将柔性三维力传感器应用于人体假肢,满足了对抓取物体的触觉力的大小和方向的感知反馈要求[21];在智能机器人方面,灵巧手加装柔性三维力传感器,能够使机器人完成更加精细、复杂的工作[22]。因此对于柔性三维力传感器的深入设计研究具有重大意义。
本文首先阐述了柔性三维力传感器的工作原理,总结了柔性三维力传感器的结构、常用材料、解耦算法和三维力加载试验平台,介绍了柔性三维力传感器的应用前景,最后展望了柔性三维力传感器研究方向。
1 柔性三维力传感器工作原理
柔性三维力传感器按照工作原理可以分为压电式[23]、压阻式[24]、电容式[25]以及其他工作形式[26],表1 对不同工作原理的柔性三维力传感器的优缺点进行了比较。

表1 不同工作原理的柔性三维力传感器的比较Tab.1 Comparison of flexible three-dimensional force sensors with different operating principles
压电式柔性三维力传感器是基于压电材料所具有的压电效应来实现三维力的检测。压电效应是指压电材料在受到外力时,其内部电子发生极化产生相应电压来反映外部压力的大小[27]。2016 年浙江大学俞平等[28]利用聚偏二氟乙烯膜(PVDF 薄膜)的压电效应制备了一种三维力传感器,如图1(a)所示。压阻式柔性三维力传感器是基于压敏材料所具有的压阻效应来实现三维力检测。压阻效应是指压敏材料在受到外力时自身阻值发生改变的现象[29]。压敏材料可以分为应变计类和复合材料类。当加载外力时,应变计类材料的长度或横截面积发生变化,使得自身阻值发生相应改变[30]。2013 年Lee 等[31]提出一种应变计类柔性三维力传感器,如图1(b)所示,他们利用聚合物材料SU-8 环氧树脂作为接触板和传力柱,将加载力传递到四个“桌角”,每个“桌角”内外两侧均有一个Ni-Cr应变计,通过采集各个应变计的输出实现三维力的检测。复合材料类是通过将高分子聚合物材料与导电填充材料充分混合制得的[32]。2019 年术洋溢等[33]制备出一种基于力敏复合材料的柔性三维力传感器,如图1(c)所示。他们将聚酰亚胺(PI)与炭黑(CB)材料进行溶液混合制备出柔性力敏复合材料,并将其置于上下电极对之间,能够实现三维力的检测。电容式柔性三维力传感器的原理是将力信号转化为易检测的电容信号。根据电容量表达式:

通过改变电极板间距d、正对面积A或介电层相对介电常数εr三个参数使得电容量发生变化。2008 年Lee 等[34]设计了一种可以检测三维力的容性传感器,如图1(d)所示。当加载三维力时,四个输出感应单元的电极板间距发生不同改变,引起对应的感应单元产生不同输出,以此实现三维力的测量。此外,还有一些基于光学[26]、涡流效应[35]、电感[36]等原理开发了多种柔性三维力传感器。2017 年Wang 等[35]基于涡流效应制备出一种柔性三维力传感器,如图1(e)所示。2018 年Kawasetsu 等[36]基于电感原理制备的柔性三维力传感器,如图1(f)所示。
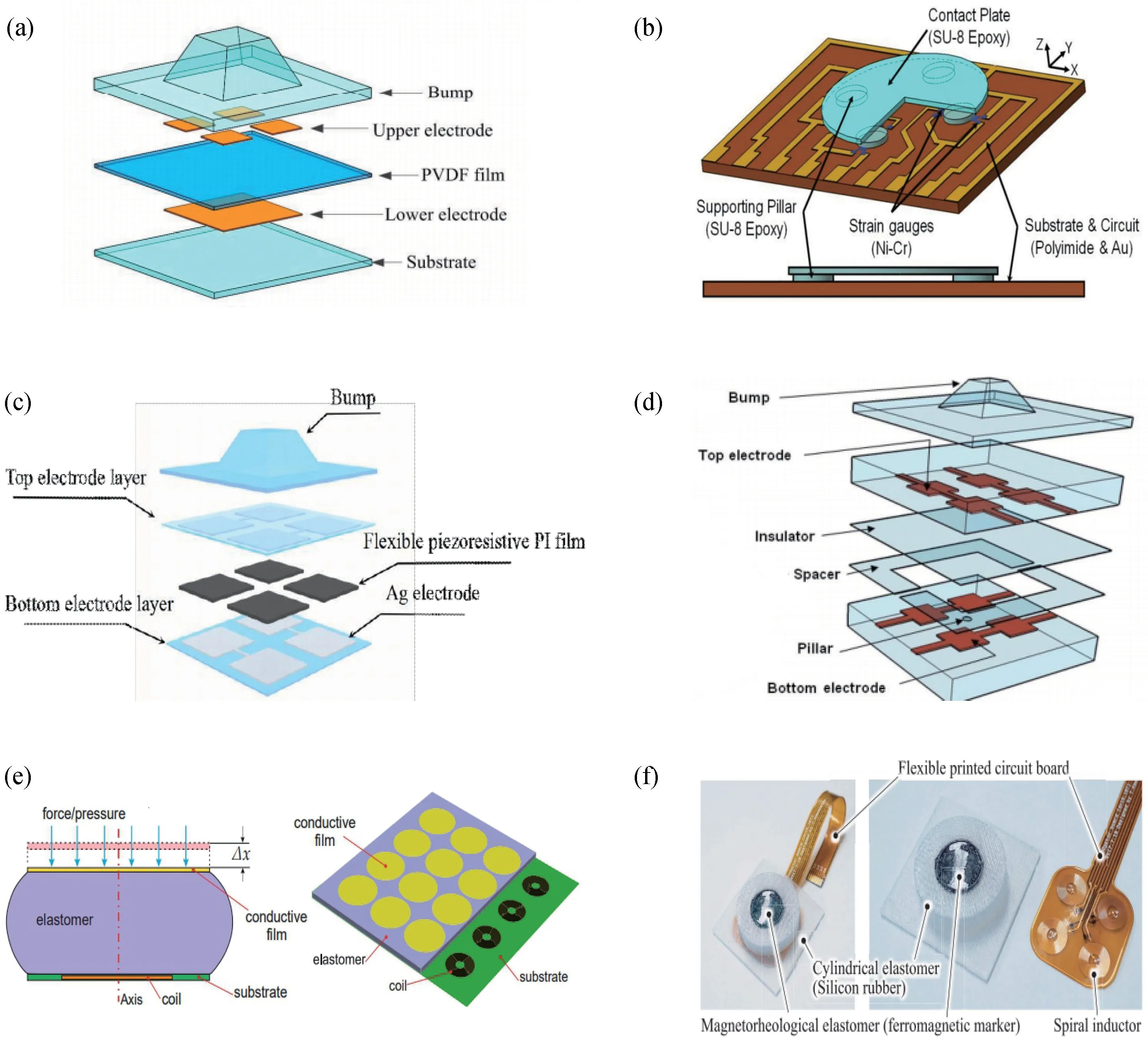
图1 (a)一种压电式三维力传感器的示意图[28];(b,c)分别为应变计类[31]和复合材料类[33]压阻式三维力传感器的示意图;(d)基于变极距型电容式三维力传感器的示意图[34];(e,f)分别基于涡流效应[35]和电感原理[36]制备的三维力传感器的示意图Fig.1 (a)Schematic diagram of a piezoelectric three-dimensional force sensor[28];(b,c)Schematic diagrams of a strain gauge[31] and a composite[33] piezoresistive three-dimensional force sensors respectively;(d)Schematic diagram of a capacitive three-dimensional force sensor based on variable pole distance[34];(e,f)Schematic diagrams of three-dimensional force sensors based on eddy-current effect[35] and inductance principle[36] respectively
2 柔性三维力传感器的结构
柔性三维力传感器的结构设计对于传感器能否实现三维力检测起着至关重要的作用,并且影响着灵敏度、重复性等重要参数。从传感器的整体结构来看,大部分的文献采用三层式结构[20-22,25,28,31,33-36],即上下底层以及中间层。当加载三维力时,上层底板发生位移从而改变了压电式、压阻式传感器应变材料的形变量或电容式传感器极板间距和介电常数,导致感应单元的输出发生变化。这种三层式的结构可以更加容易地分辨剪切力。2013 年,吕晓洲等设计了一种电容式传感器,如图2(a)所示,此传感器上下底层采用PCB板,中间层采用4 个聚二甲基硅氧烷(PDMS)正方体分割柱位于传感器四角以作支撑[37]。当加载法向力时,中间层受压位移;当加载剪切力时,中间层会发生错位扭曲。由于中间层结构的形变,使得传感器驱动电极与感应电极之间的距离及重合面积改变,从而引起感应单元产生不同的电容输出,以此实现三维力检测。这种三层式结构在进行柔性三维力传感器组装时,存在一个关键技术问题即传感器封装对准问题。因为绝大多数传感器是分层制作,逐层组装,所以在整体结构封装对准方面亟需探索新方法,以减少制作误差,提高传感器自身性能。此外还有采用内嵌式[38-40]和一体式[41-42]传感器结构设计来实现三维力检测。2019 年Choi 等[40]制备了一种内嵌式结构的传感器,如图2(b)所示。2011 年徐菲等[41]制备了一种一体式结构的传感器,如图2(c)所示。

图2 (a)三层式[37]、(b)内嵌式[40]、(c)一体式[41]结构的三维力传感器的示意图Fig.2 Schematic diagrams of three-dimensional force sensors with (a) three-layer structure[37],(b) embedded structure[40] and (c) integrated structure[41]
从传感器的电极结构来看,压电式柔性三维力传感器是上下电极结构[23,28,43]。当施加三维力时,各电极上积累的电荷不同,利用采集到的电压信号实现三维力的检测。2018 年Chen 等[43]制备了上下电极结构的压电式传感器,如图3 所示。

图3 压电式上下电极结构的三维力传感器的示意图[43]Fig.3 Schematic diagram of a three-dimensional force sensor with piezoelectric upper and lower electrode structure[43]
压阻式柔性三维力传感器大多也采用上下电极结构[22,24,33,44],一方面是可以采集感应单元的输出,另一方面当传感单元在受力时,导电填充物与电极接触面积增大可以使传感单元与电极间的接触电阻减小。2014 年Yang 课题组[44]制备的上下电极结构的压阻式传感器,如图4 所示。

图4 压阻式上下电极结构的三维力传感器的示意图[44]Fig.4 Schematic diagram of a three-dimensional force sensor with piezoresistive upper and lower electrode structure[44]
电容式柔性三维力传感器电极结构分为上下电极和同面电极[45]结构。2016 年Huang 等[45]基于边缘效应制备的同面电极结构的柔性三维力传感器,如图5(a)所示。上下电极结构[20-21,25,34,37,46]不但可以做输出单元的引出,而且当传感器受到三维力时,利用电极板正对面积的变化[46-49]可以实现三维力检测。2017 年Chandra 等[49]利用检测上下极板正对面积变化的方法制备出电容式柔性三维力传感器,如图5(b)所示。
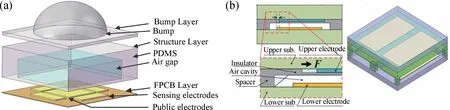
图5 (a)电容式同面电极结构[45]和(b)上下电极结构[49]的三维力传感器的示意图Fig.5 Schematic diagrams of three-dimensional force sensors with (a) capacitive coplanar electrode structure[45] and(b) upper and lower electrode structure[49]
对于传感器的中间层,压电式和压阻式柔性三维力传感器中间层大多是放置敏感单元[22-24,28,31,33,43-44],当施加三维力时,敏感单元受力而产生不同的输出信号,以此来实现测量三维力。将电容式柔性三维力传感器中间层称之为介电层,研究人员通过设计不同的介电层结构[25,50-53]来改善介电常数以及增强传感器的形变能力,例如设计多层介电层结构[25],如图6(a)所示;设计气隙式的介电层结构使得上层电极可以浮动[50],如图6(b)所示;设计微金字塔式介电层结构[53],如图6(c)所示。通过巧妙地设计介电层结构可以大大提高传感器的灵敏度。此外,目前越来越多的研究人员在上底板上附加一层凸起层,利用凸起结构[21-22,44-45,50-53]可以将三维力更好地传递给传感元件,使传感元件对三维力的感知更敏感,2011 年Lee 等[54]制备了带有凸起结构的电容式柔性三维力传感器,如图6(d)所示。

图6 (a)多层式[25]、(b)气隙式[50]、(c)微金字塔式[53]介电层结构的电容式三维力传感器的示意图;(d)带有凸起结构的电容式三维力传感器的示意图[54]Fig.6 Schematic diagrams of capacitive three-dimensional force sensors with (a) multi-layer[25],(b) air-gap[50] and (c) micro-pyramid[53]dielectric layer structures;(d)Schematic diagram of a capacitive three-dimensional force sensor with a raised structure[54]
3 柔性三维力传感器的常用材料
柔性三维力传感器上下衬底通常作为金属电极的支撑,常见的衬底材料有聚对苯二甲酸乙二醇酯(PET)[46]、PI[52]等。PET 具有良好的透明度、耐摩擦、耐高温等特性。PI 具有良好的电气绝缘性、耐高温性,且其化学性质稳定。柔性三维力传感器电极材料常见的有金、银、铜、铝、镁、铬、钛等,其中金、银的电阻率较小,但价格昂贵,而铜的电阻率相对较低,且价格适中,所以大多数研究人员选用铜作为电极材料[55]。对于传感器的凸起结构,研究人员大多采用PDMS 作为凸起材料[44-45]。因为凸起结构在受力时会出现滞回现象,所以应当尽可能地提高凸起材料的杨氏模量来减小滞回现象。研究人员可以通过改变PDMS 中原液和固化剂的质量配比或者将PDMS 与其他材料混合来提高材料的杨氏模量。对于压电式和压阻式柔性三维力传感器来说,敏感材料是传感器的核心材料。研究人员通过探索使用压电薄膜和压电材料复合物来提高传感器的灵敏度、响应速度及重复性等,如PVDF 薄膜[23]以及PVDF 粉末、碳纳米管(CNT)和PDMS 三者聚合物[56]。研究人员通过制作新型力敏复合材料,如PI 与炭黑的聚合物[33]、硅橡胶与炭黑和石墨烯的聚合物[57]、PDMS 与多壁碳纳米管的聚合物[58]等,以及应变计材料[31,59]来提高传感器对三维力信息的感知能力。对于电容式柔性三维力传感器,常见的中间介电层材料有PDMS[49]和其他柔性材料如氟硅橡胶[25]。当传感器受到相同外力时,将杨氏模量尽量小的PDMS 作为介电层材料,可以使得介电层的形变量较大,传感器的灵敏度可以得到较大提高。
4 柔性三维力传感器解耦方法归纳
目前,在所整理的文献中主要有如下几种解耦方法。第一种:通过定义中间参数,将三维力与感应单元的输出建立关系,即正压力与感应单元输出建立均值关系,剪切力与感应单元输出建立差值关系,来实现三维力的解耦与测量[24,28,53]。如西安电子科技大学杨嘉怡定义上下底板间距为中间变量,通过中间变量建立感应单元输出与三维力分量的关系,实现三维力测量[24]。目前这种解耦方法被广泛应用。第二种:根据传感器结构和材料的特性来建立相应的解耦算法。如Lee 等[54]通过弹性力学分析了传感器在三维力下的受力状态,并提出了基于弹性力学的三维力解耦模型;Yao 等[60]基于所设计的传感器的结构及材料建立了数学解耦模型;徐菲[42]基于力敏导电橡胶的理想力学特性建立了解耦模型,但此传感器内部交叉点较多,使得解耦变得相对困难。第三种:研究人员利用神经网络方法,对采集到的输出值解耦出传感器所受到的三维力的信息[38-39]。如胡广宇等[38]利用BP 神经网络算法,通过采集到的电压值解耦出传感器所受的三维力信息。其他方式还有:Lee 等[31]利用新的解耦方法即归一化力分量来解耦所施加的三维力;Choi 等[40]通过建立气室的压力变化与三维分力的关系建立解耦模型。目前,对于柔性三维力传感器的解耦算法大多采用近似线性化、理想化处理,因此不能准确地解耦三维力,故对于柔性三维力传感器的解耦算法值得进一步探索研究,例如加入寻优算法、修正函数、机器学习算法等来丰富当前的解耦算法,以提高解耦的准确度。
5 三维力加载实验平台
采用三维力加载平台对制作的传感器进行性能测试是必不可少的。而不同的力加载平台会对传感器的性能评估产生一定影响,选用合适、精准、可靠的力加载平台是对传感器性能准确评估的前提。目前,在所整理的文献中主要有四类力加载平台。第一类是由六维力/扭矩传感器和x-y轴位移平台组成的力加载实验平台,例如哈尔滨工业大学Zhang 课题组[61]所使用的三维力加载平台,如图7(a)所示,其测量范围是0~200 N,分辨率约为0.02 N。该类型测力范围大,但精度不高。第二类是由一个单轴测力计分别搭配垂直加载棒和“L”型加载棒及x-y轴位移平台组成,例如合肥工业大学Huang 课题组[45]所使用的三维力加载平台,如图7(b)所示,其单轴测力计测量范围是0~10 N,分辨率约为0.01 N。该类型对于测量无凸起结构的传感器而言操作相对困难。第三类是由两个单轴测力计和两个x-y轴位移平台组成,例如西安电子科技大学Lyu 课题组[62]所使用的三维力加载平台,如图7(c)所示,其测力计测量范围是0~5 N,分辨率约为0.001 N。该类型测量精度高但测力范围小,且水平方向测力计需调平。第四类是由三维位移平台和商用三维力测量平台组成,例如浙江大学Mei 课题组[63]所使用的三维力加载平台,如图7(d)所示,其测量范围是0~50 N,分辨率约为0.01 N。该类型测量范围较大,但价格相对昂贵。
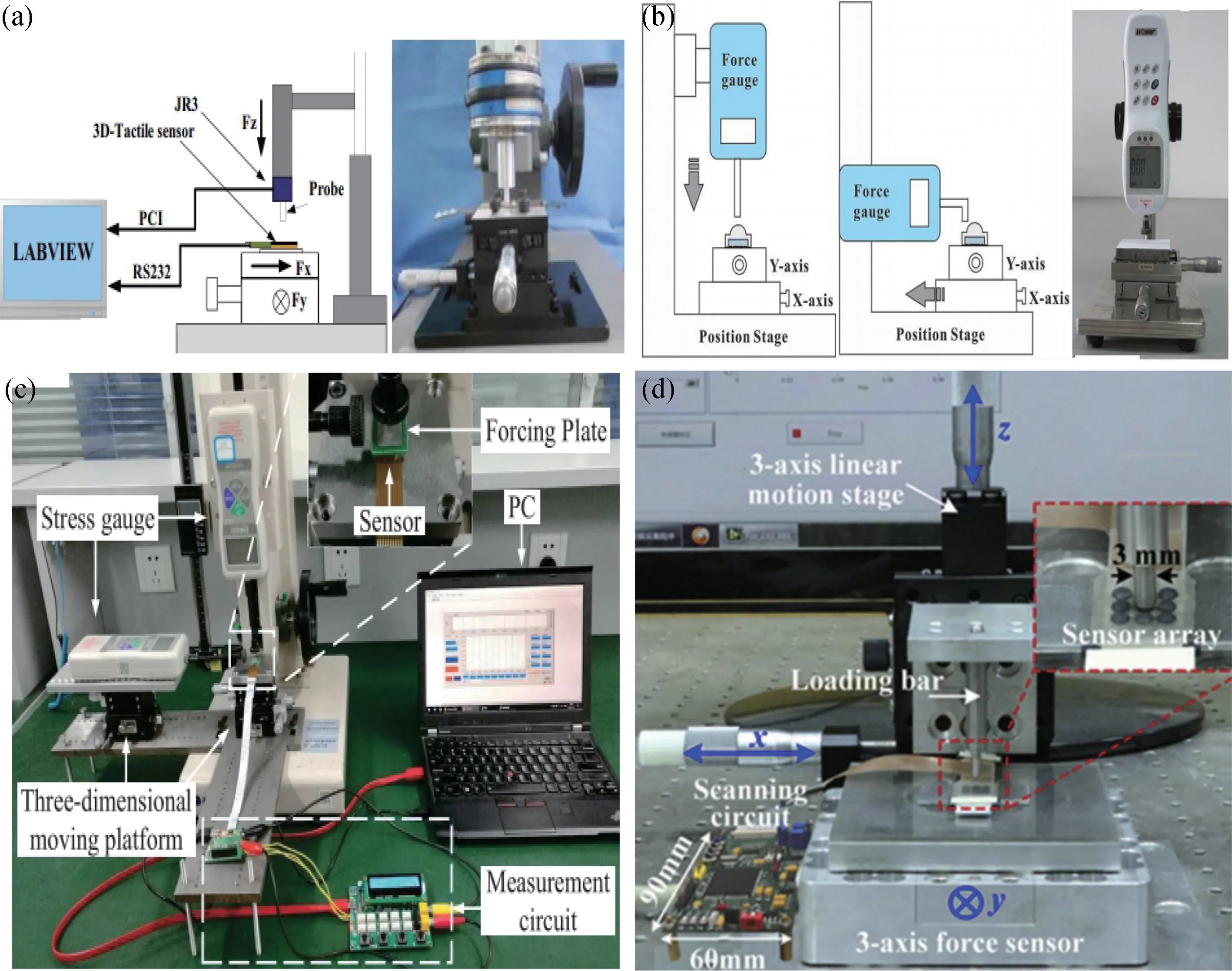
图7 (a)Zhang 课题组[61];(b)Huang 课题组[45];(c)Lyu 课题组[62]和(d)Mei 课题组[63]采用的三维力加载实验平台示意图Fig.7 Schematic diagram of a three-dimensional force-loading test platform adopted by (a) Zhang's research group[61];(b)Huang's research group[45];(c)Lyu research group[62];(d)Mei's research group[63]
6 三维力柔性传感器的应用
随着科研人员的努力、科技的进步、设备的需求,柔性三维力传感器将会在更多领域发挥作用。近年来,Surapaneni 等[55]设计的柔性三维力传感器应用于人行走过程中的步态分析,能够估计出行走过程中人的大致速度和行走距离,如图8(a)所示。西安电子科技大学张峰[20]将柔性三维力传感器应用于足底界面应力检测,对临床医学、生物力学和体育训练的研究和发展有一定的推动作用,如图8(b)所示。Laszczak 等[64]将柔性三维力传感器应用于人工假肢使用情况的监测,能够有效防止假肢在早期破裂,这有利于促进人工假肢智能化的进一步发展,如图8(c)所示。合肥工业大学毛磊东[65]将柔性三维力传感器应用于机械手上实现抓取物体及滑动检测,如图8(d)所示。现阶段三维力传感器应用所面临的问题主要在于传感器的灵敏度、可靠性以及成本等方面,此外针对不同应用环境,对传感器的大小、耐热性、抗干扰性等方面也提出一定的要求。
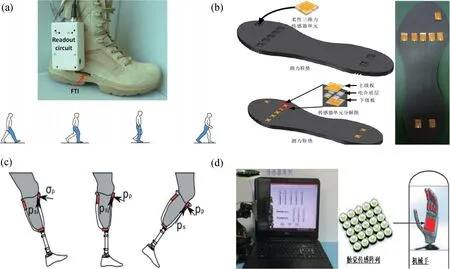
图8 柔性三维力传感器应用于(a)步态分析[55];(b)足底界面应力检测[20];(c)人工假肢使用情况监测[64];(d)机械手[65]的示意图Fig.8 Schematic diagrams of flexible three-dimensional force sensors applied to (a) gait analysis[55],(b)stress detection at plantar interface[20],(c) monitor the use of artificial limbs[64] and (d) manipulator[65]
7 总结与展望
近年来,柔性三维力传感器的发展非常迅速,在结构、材料、解耦等方面呈现出多样性发展的态势,国内外研究人员陆续制备出灵敏度高、稳定性好、检测能力强的柔性三维力传感器,这些传感器推动了人工假肢、机器人、运动监测等领域的进一步发展。但是,柔性三维力传感器仍存在许多尚未解决的问题。例如,封装对准技术不成熟导致制作出的传感器初始值各不相同,无法实现量产,而且目前并未对柔性三维力传感器的整体性能提出定量指标。最重要的是,柔性三维力传感器在结构及材料方面仍需要大的技术突破来提高三维力检测能力及其性能参数。在性能方面,相较于传统的传感器,柔性三维力传感器仍有较大的进步空间。因此,探索新结构与研究新材料以制备出高性能的传感器是今后柔性三维力传感器的研究重点。同时,未来柔性三维力传感器仍然会朝着微型化、可阵列化、多功能化等方向继续发展。柔性三维力传感器将在智能机器人、环境监测、医疗等应用场景中展现出越来越重要的作用。
