飞行模拟机增强型近地告警系统仿真研究与设计
2021-06-03赵旭东
付 炜, 赵旭东
(北京蓝天航空科技股份有限公司,北京 100085)
在严重威胁航空安全的事故中,可控飞行撞地(Controlled Flight Into Terrain,CFIT)是造成死亡人数最多的事故原因。CFIT是指飞机在适航状态下,由于飞行员操作失当、夜航或复杂气象导致目视条件下降,引起的飞行器发生撞山、撞地、障碍物或坠水的事故[1]。
增强型近地告警系统(Enhanced Ground Proximity Warning System,EGPWS)在原有GPWS的模式告警功能基础上,增加了前视地形显示预警(Terrain Awareness and Display,TAD)以及地形净空层(Terrain Clearance Floor,TCF)保护的能力[2]。通过对机载近地告警系统技术规范和多型机载近地告警计算机技术手册的研究,搭建与飞机一致的告警模型,采用高精度地形数据库结合机场模型作为地形及障碍物高程信息的来源,实现近地告警地形环境仿真。应用飞行模拟机,对飞行员进行EGPWS科目训练,可以增强飞行员对地形的情景意识感知,有效避免由于飞行机组操作失误导致的CFIT风险。
1 EGPWS的增强告警功能
在EGPWS的仿真设计中,保持了与机载系统一致的系统架构。近地告警计算机仿真软件接收来自外部传感器的飞行参数,包括GNSS或惯性导航系统的经纬度,大气数据系统输出的气压高度、升降速度,无线电高度,仪表着陆系统的下滑偏差等。近地告警避撞模型根据起落架和襟翼所处的位置,判断飞机所处的构型,进而选择相应的近地告警模式和对应的告警包线。
增强型近地告警系统除了保留GPWS的模式报警功能外,还驻留了可定期升级的地形和障碍物数据库,增加了一个含有地形数据库的预警模块,综合显示系统根据飞机距地面的高度差绘制不同级别的图形元素,这些图形元素单元组成了载机周边的地形地图,为飞行机组提供直观观察二维高程地形的人机界面。
此外,近地告警系统存储有一个机场数据库,包含跑道长度大于3500 ft的硬质跑道机场和地形复杂机场数据,以机场跑道为中心,建立一个离地高度沿阶梯递增的净地空间,在飞机进入净空高保护区域时将触发“TOO LOW TERRAIN”的语音和视觉的告警,防止飞机受控撞地。在这些机场周边提供TCF。
2 前视地形和TCF仿真原理
2.1 前视地形告警原理
前视地形告警系统的工作原理是基于飞机的飞行状态,在其前进方向空间上生成一个虚拟的三维安全包线,同时获取数据库提供的地形、障碍物数据信息,实时比较告警包线与周边地形的空间位置关系。当告警包线与周边地形接触时即触发告警,给出灯光告警和语音告警。此外,前视地形告警还具有地形/障碍物显示功能。前视地形功能通过航空总线接收来自机载导航系统输出的大气数据、经纬度、无线电高度等传感器位置[3],访问近地告警系统存储的高精度高程与障碍物数据库,输出可触发视觉和听觉告警的提示消息给显示和声音仿真系统,其功能架构如图1所示。

图1 前视地形功能架构
2.2 对地净空层告警系统原理
TCF功能需要访问飞行管理系统输出的目的地机场、跑道信息。TCF模型以跑道中心点为坐标原点,但TCF告警包络起点并不为跑道中心点,偏移量k通常为半跑道长度。
TCF包络线根据距跑道中心的距离,可以分为小于k+4 nm、k+12 nm、k+15 nm、大于k+15 nm共4个不同告警阈值区间,通过实时解算载机距离机场中心点的距离判断所在区间,进而根据当载机当前无线电高度判断载机是否触发了TCF告警。当无线电高度低于30 ft时,TCF告警将被抑制。TCF告警包络范围与机场跑道的相对关系如图2所示。
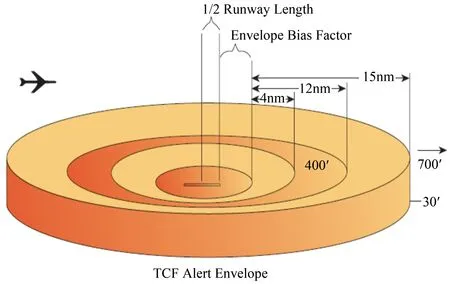
图2 TCF模型示意图
在更新版本的增强型近地告警系统中,又引入了机场跑道净空层(Runway Field Clearance Floor,RFCF)保护区。RFCF是在对地净空层告警包络线的基础上附加了一个几何高度指数,以便当飞机在高海拔机场近进时,离地高度可能很高,而相对机场的几何高度较低时即可触发告警。RFCF告警功能主要用于山区或高原机场,由于地形复杂导致的离地高度突变,通过建立虚拟的高度过渡层模型,提供航路前方潜在的地形威胁警告,也可使飞行员平缓操纵规避地形突变导致的碰撞风险,为飞行员正确操纵飞机安全避让地形提供充裕的时间保证。RFCF功能的使用需要载机的GPS系统提供满足精度要求的水平位置及高度参数。TCF与RFCF的区别在于,TCF限制的是飞机与地面的高度,而RFCF限制了飞机与机场的相对高度,如图3所示。
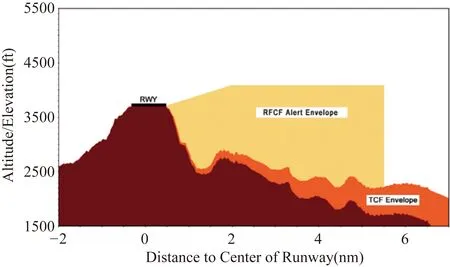
图3 RFCF和TCF保护区域对比
3 前视地形告警实仿真实现
前视地形告警功能仿真设计通过实时访问DEM高程地形数据和障碍物数据库,读取扫描区域内的地形/障碍物高度,解算载机与高程数据的高度差作为地形显示的依据[4]。机组通过显示控制系统设置地形显示区域范围,以载机经纬度作为坐标原点,以载机真航向为X轴,载机航向右侧为Y轴。
仿真试验中设置的地形扫描区域范围为16 nm×16 nm,以飞机所在位置为零点,机头方向为x轴正方向,机身侧向垂直向右为y轴正方向,则扫描区域可以表示为[-4,12]×[-8,8]。扫描方式分为逐行扫描和扇形扫描两种,利用全局变量secterON进行选择。
3.1 逐行扫描方式
逐行扫描每一帧以(x0,y0)点作为扫描起点,以从左至右,从上至下的方式进行地形扫描。
逐行扫描显示区域,地形显示时,将显示区域栅格化,最小显示的一格为边长为sweep的正方形(目前全局变量sweep=0.25 nm,x、y方向上划分的格数保存在全局变量sweepX和sweepY中)。由于地形数据库的分辨率为30 m(保存在全局变量terrainNetSize中),远小于sweep,因此在计算每一栅格的地形高度时,需要把这一格以30 m的分辨率再进行细分(细分数量保存在全局变量partNum中,根据具体的项目需求进行配置),读取每一小份的地形高度,取其最大值为这一格的地形高度,如图4所示。
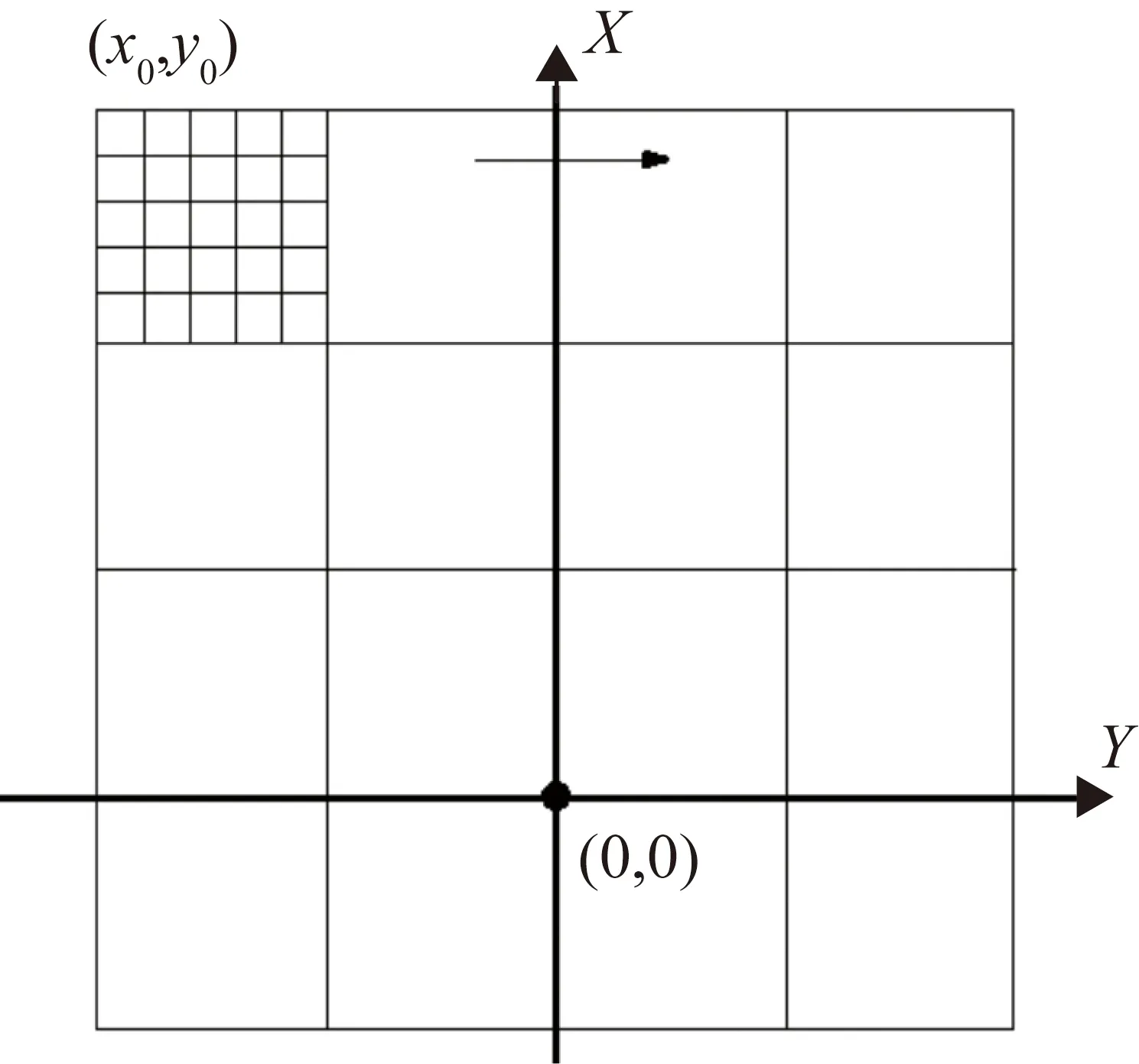
图4 逐行扫示意图
3.2 扇形扫描方式
扇形扫描方式以飞机为圆心,圆周式扫描。
将显示区域栅格化,划分大小与行扫相同。扫描步长为stepAngle(目前为0.5°),扫描线长为scanLength(目前为15 nm),每条线上的点间距为dotLength(目前为0.01 nm),点数为dotNum。每一条扫描线上的点需要落入到对应的栅格中,为了提高落入点判断效率,只判断扫描线所在象限内的栅格(图示扫描线在第二象限,则只需判断点是否落入第二象限内的栅格即可),一个栅格的地形高度就是落入其中所有点的最大高度,如图5所示。
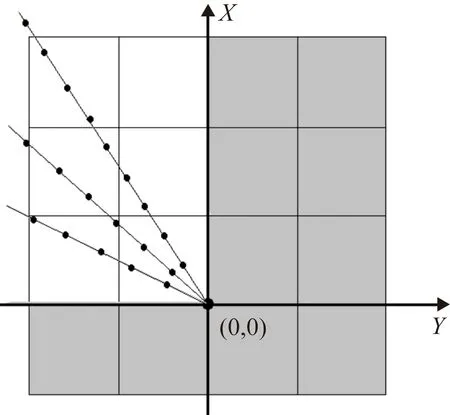
图5 扇形扫描示意图
根据飞机所在高度求出地形与飞机的相对高度,不同高度对应不同的颜色,颜色信息以整型数据的形式保存在color[sweepX][sweepY]中。
3.3 净空层告警仿真实现
设计控制台版本的测试界面输出,TFC功能被触发时将输出“TOO LOW TEERAIN”语音告警标识,当飞机处于TFC/RFCF告警包线内时,注意告警灯将持续显示。当有任意告警模式被触发,打印包含告警触发时刻的触发告警模式,当前场景最大、最小地形高度,经优先级排序、抑制后的语音告警标识和告警灯燃亮状态。图6为机场着陆场景测试打印结果,测试进行到1530 s,触发TCF/RFCF告警,输出语音及指示灯告警消息;飞机持续下降,1620 s,保持在TCF/RFCF包线内,保持告警灯燃亮;1800 s,同时触发近地告警常规模式mode 4A、mode6及TCF/RFCF警告。
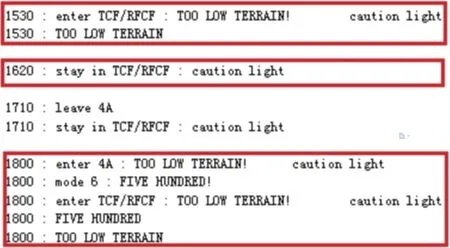
图6 控制台打印TCF/RFCF告警信息
3.4 地形显示仿真实现
以ARJ21飞机近地告警系统作为仿真对象,使用VAPS软件绘制电子式飞行显示器人机显示界面,在导航显示窗口叠加地形显示图层,演示了首都机场36跑道近进过程中地形扫描的仿真画面,如图7所示。EGPWS仿真研究的成果已经应用于ARJ21程序训练器项目,作为集成机载设备的替代方案,即将交付应用于飞行员的初始、改装训练。
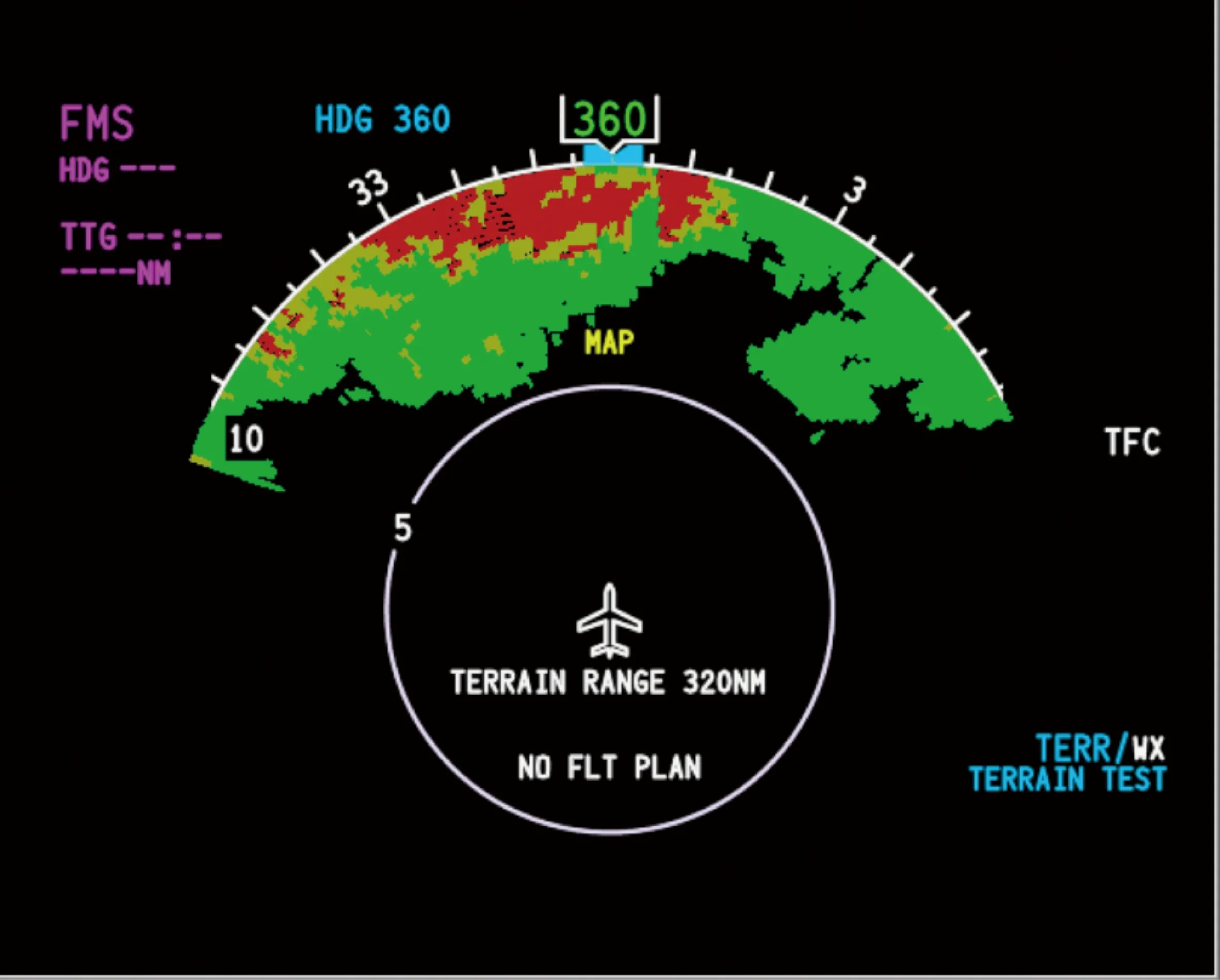
图7 ND显示页面叠加地形显示及告警窗口
5 结束语
以 EGPWS 的增强功能TAD和TCF功能模块作为重点研究对象,研究了前视地形扫描采样及告警逻辑判断的基本理论和方法,对TCF与其增强功能RFCF的原理和保护域建模方法进行了阐述。设计了适用于模拟机的EGPWS 仿真系统,利用飞行仿真模块输出的载机飞行参数及传感器数据,对EGPWS的告警模式及前视预警模块、地形库以及地形显示模块进行仿真。研究与仿真试验结果表明,所研究的EGPWS仿真模型架构合理,算法可行,系统输出响应与机载EGPWS在相同测试条件下反馈一致,可以作为机载试验件的替代产品,应用在IPT、FTD等飞行模拟训练设备中。
