电静液作动器在空中加油中的应用研究
2021-06-03周瑜
周 瑜
(中航西安飞机工业集团股份有限公司,陕西 西安 710089)
随着军事需求的不断牵引和航空工业技术的不断升级迭代,具有优异飞行性能和持久续航能力的先进飞行器得到广泛关注。作为增强航空兵机动能力和打击能力的重要措施之一,现代空中加油技术成为了一个研究热点。飞机在空中完成复杂的加油过程时,由于高马赫数、高速状态下气动力变化莫测,为了提高空中加油的精准性,飞机姿态的控制就显得尤为重要。早期运输机或直升机采用机械式钢索控制舵面时,操纵力大,飞行员操纵负担重,飞机姿态难以精确控制。随着电传飞行控制系统的发展,国内外均采用作动器驱动舵面的运动,替代了人工机械操纵钢索,直接电信号驱动伺服系统,从而引入液压源输出流量驱动作动筒的运动,输出舵面偏转的位移。
作动器(舵机)主要是指接受飞机操纵指令(机械位移指令或电气控制指令),利用机载能源(如液压源、电源),驱动飞机操纵面偏转的执行部件,作动器相当于力放大器,是极大地减轻驾驶员操纵负担的一种装置,为飞机飞行控制的最后关键一环,能够精准控制飞机舵面的偏转,从而实现飞机姿态的控制。目前,为了满足飞机向高机动性、高稳定性及大功率方向发展,国内外先进的电静液作动器正朝着高压化、大功率、变压力、智能化、集成化、多余度方向发展,具有良好的应用前景。
电静液作动器是电气和液压联合一体的伺服作动器。它综合了电气控制、液压传动及控制两者的优点,电气部分一般用作系统信号接收、放大变换、传输、反馈控制;液压部分则作为功率转换、放大和传动的执行部件。目前在国外多种机型中都有应用,如:B-2、AF-22、JAS-39、EFA-2000、F/A-18E/F、F-35、M346、T50、NH90等,国内多型战机也有应用,逐渐使得飞机向着“多电飞机”方向发展,根据目前的发展方向,逐渐向“全电飞机”的目标迈进。
目前,AMESim软件是国内外流行的液压系统计算机仿真软件,通过此软件,能够进行液压传动系统的静/动态特性仿真,AMESim可以解决绝大多数液压工程的问题,它提供了从流体力学到液压传动、直到伺服控制的完整液压解决方案。采用基于物理模型的图形化建模方式,使得用户可以从繁琐的数学建模中解放出来,从而专注于物理系统本身的设计。
笔者主要阐述了新型电静液作动器的系统结构与原理,对电静液作动器进行了理论建模。同时,考虑空中加油过程中的气动负载,对作动系统的节流系数进行了优化设计。AMESim仿真结果表明,电静液作动器可以精确跟踪输入信号,舵面偏转误差满足工程应用的容差限。
1 EHA的系统组成和工作原理
电静液作动器(Electro Hydrostatic Actuator,EHA)的原理模型如图1所示[1-4],采用AMESim液压仿真软件对EHA进行建模,在EHA中,集成了很多液压附件,用以完成补油、过压保护和工作模式选择等功能。具体包括控制器、高性能直流无刷电机(Brushless Direct Current Motor,BLDCM)、双向柱塞泵、蓄压器、单向阀、油滤及子系统、安全阀、作动筒、压力传感器、负载位移传感器和旋转变压器(速度传感器)。其中,电机电压为DC 250 V,转速不超过4000 r/min,作动筒行程不超过100 mm,最大运动速度不超过100 mm/s,最大静态输出力不超过100 kN。
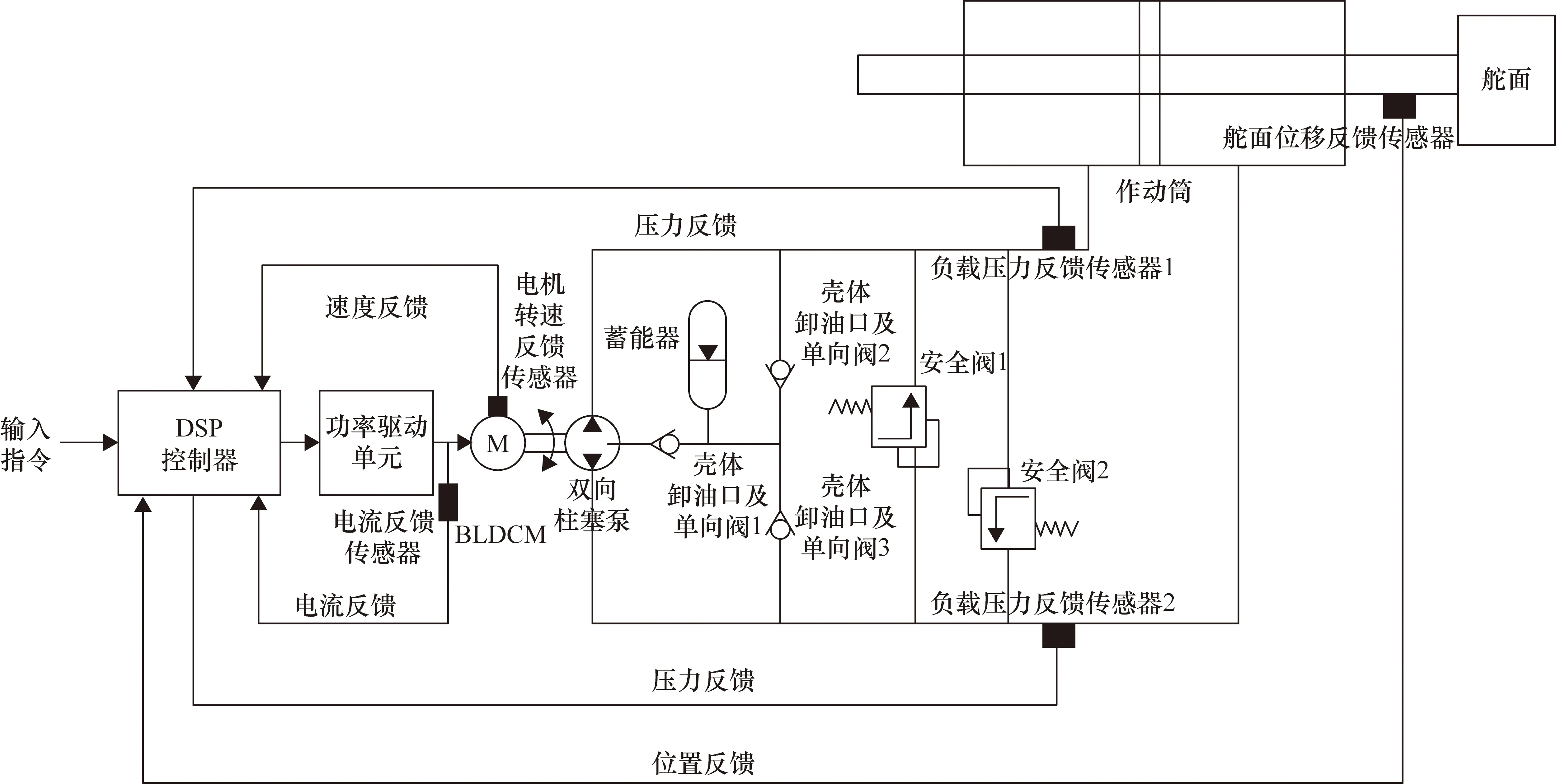
图1 EHA系统组成与原理图
DSP控制器接受上游飞控计算机的输入指令信号,传递给功率驱动单元,驱动直流电机,电机输出转速带动柱塞泵旋转,柱塞泵输出高压油到作动筒中,最终实现对舵面负载的驱动。蓄压器的作用是当系统压力低于工作压力时,对系统进行补油,防止气穴现象发生,安全活门是防止柱塞泵和作动筒中产生过高的压力。
2 EHA的AMESim建模与仿真
2.1 EHA建模
根据图1所示的EHA功能示意图,构建功能级EHA模型[5-7],如图2所示。
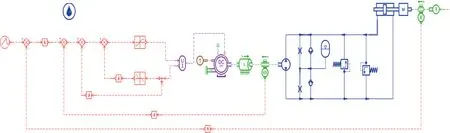
图2 AMESim中的EHA系统模型
模型包含有:双向液压泵、蓄压器、安全阀、直流电机、单向阀、节流孔、作动筒、舵面、位移传感器、压力传感器等。
2.2 主要性能指标
EHA主要性能指标如下:
① 电机功率:7.5 kW;
② 电机供电电压:DC 250 V;
③ 电机最高转速:4000 r/min;
④ 作动器行程:100 mm[8];
⑤ 作动器最大速度:100 mm/s[9];
⑥ 作动器最大静态输出力:100 kN;
⑦ 系统工作压力:21 MPa;
⑧ 系统最大流量:33.33 L/min。
仿真所用详细参数如表1所示[10]。
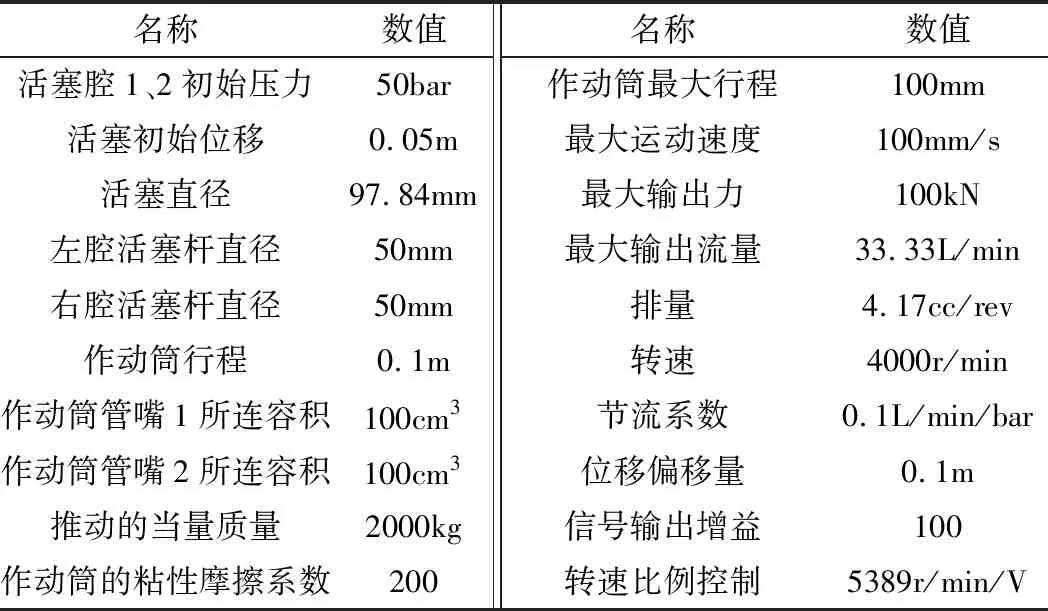
表1 功能级EHA模型元件参数表
3 仿真结果及分析
3.1 EHA系统的仿真结果分析
当输入位移指令为5 V时(0.1 V对应1 mm)[11-12],气动负载为20000 N,节流系数为0.5 L/min/bar时,舵面的输出位移曲线如图3所示。
图3是节流系数为0.5 L/min/bar时,舵面输出位移的仿真图,由图3可看出,0~0.5 s时没有位移的输入与输出,在第5 s加入20000 N的气动负载时,舵面位移曲线有明显的波动,并且稳定后舵面输出位移的稳态误差较大,根据此现象,将节流系数缩小至0.1 L/min/bar时再进行仿真分析,结果如图4所示。

图3 节流系数为0.5 L/min/bar时的位移偏移量
图4是节流系数为0.1L/min/bar时,舵面输出位移的仿真图。由图4可看出,0~0.5 s时没有位移的输入与输出,在第5 s加入一个20000 N的气动负载时,对舵面的位移有较小的扰动,此时舵面位移的稳态误差较小,但也没完全消除,鉴于此,再将节流系数缩小至0.01 L/min/bar进行仿真分析,结果如图5所示。
图5是节流系数为0.01 L/min/bar时,舵面输出位移的仿真图,由图5可看出,0~0.5 s时没有位移以及气动负载的输入,在第5 s时加入一个20000 N的负载力。从仿真图显示舵面输出位移的扰动非常小,最终稳定后输出位移的稳态误差较图4更小,基本满足目标值0.05 m。
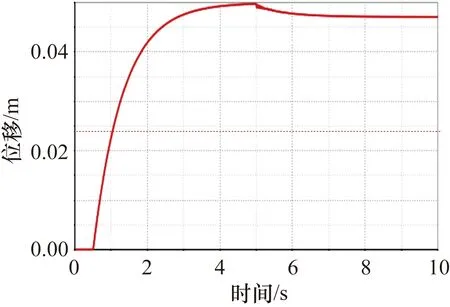
图4 节流系数为0.1 L/min/bar时的位移偏差量
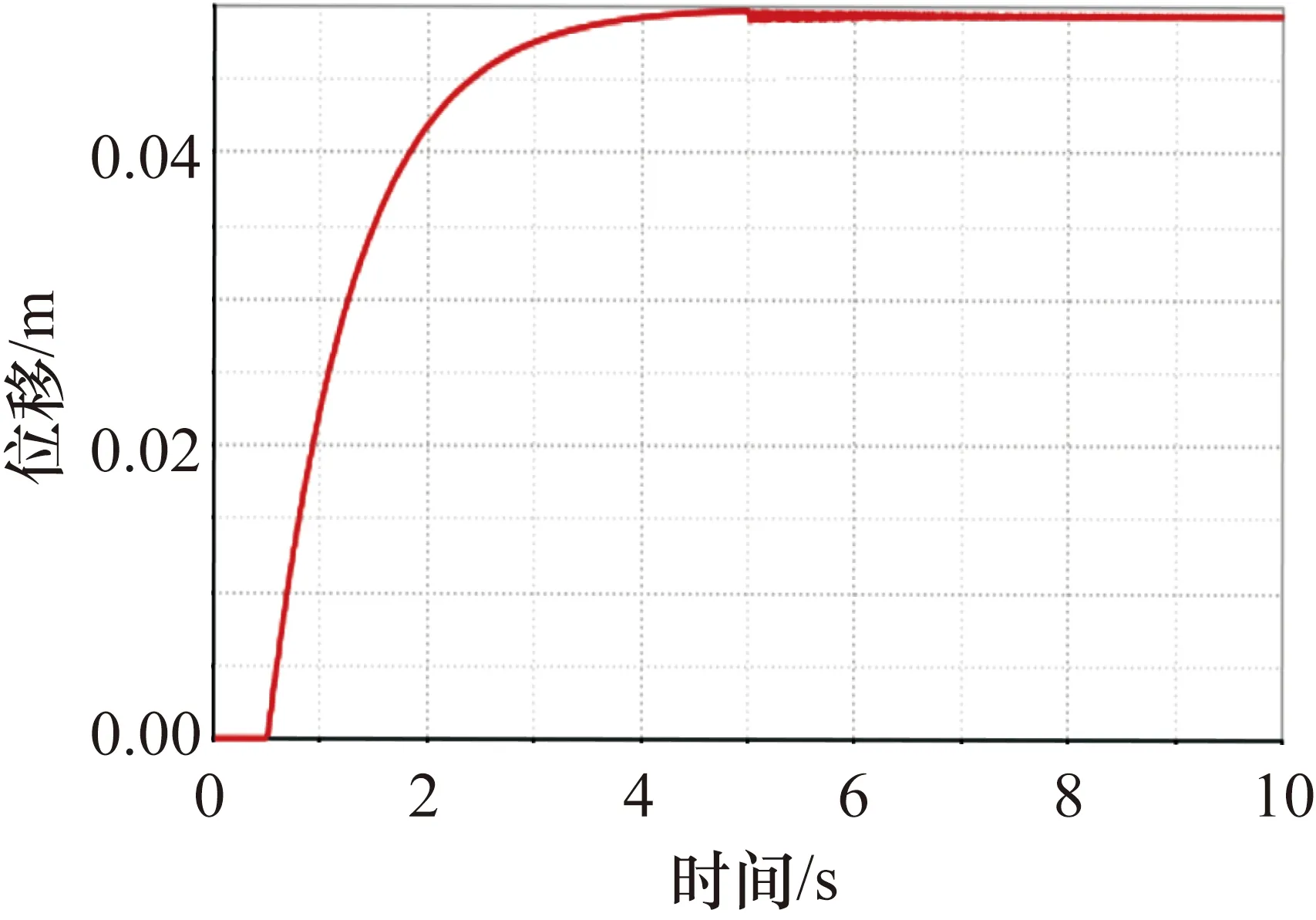
图5 节流系数为0.01 L/min/bar时的位移偏差量
从以上仿真曲线图可看出,节流系数越小,舵面位移的稳态误差越小,下面进行节流孔流量的公式分析。
3.2 基于AMESim的节流孔公式分析
液体流经节流孔的模型如图6所示,AMESim中的节流孔模型如图7所示。通过液体流过缝隙来控制压力和流量,以此来达到调压或调速的目的,本节通过研究液压油在节流孔的流动规律,进而合理分析舵面输出位移的稳态误差,从而提高飞机姿态的稳定性,对于空中加油意义重大。

图6 液体流过节流孔的示意图

图7 AMESim中的节流孔模型
节流孔是AMESim软件中液压模块的元器件,通过调节孔口的大小,进而控制流过孔的液压流量,从而实现限流的作用。其原理为:流体在管道中流动时,由于孔板的局部阻力,使得流体的压力降低,能量损耗,该现象在热力学上称为节流现象,调节节流孔的方式比采用调节阀要简单,但必须得当,否则液体容易产生汽蚀现象,影响管道的安全运行。
在AMESim中节流口模型的流量公式如下:
(1)
式中,Arest为节流孔面积;vrest为节流孔处流速;Avc为缩流断面面积;vvc为缩流断面处流速;Cd为流量系数;Q为通过薄壁孔流量;ρ为液体密度;A1为孔口上游通道断面面积;A2为孔口下游通道断面面积;v1为孔口上游流速;v2为孔口下游流速;Pup为孔口上游通道断面压力;Pvc为缩流断面处压力。
从节流孔的流量仿真公式可知,当通过图2 AMESim建立的EHA系统中的节流孔的流量越大时,从柱塞泵输出的高压油量供给舵面的流量就越少,导致输出的舵面位移偏离目标值越大,即所谓的稳态误差越大;当通过节流孔的流量越小时,从柱塞泵输出的高压油量能最大效率输送给舵面,驱动舵面的偏转,进而能最大程度接近目标位移值,即稳态误差越小。
根据这一分析结果可知,节流系数直接影响舵面输出位移的稳态误差,进而直接控制飞机姿态的变化,节流流量越小,舵面偏转的稳态误差越小,姿态的稳定性越高,越有利于空中加油技术的实施。
4 结论
针对加受油过程中舵面偏转不精准问题,考虑使用作动器来驱动舵面运动[13],基于AMESim建立了EHA系统模型,并提出了通过调节EHA中节流系数的方法,来解决舵面输出位移稳态误差偏大的问题,得到以下结论:
① 基于AMESim建立的EHA模型原理正确,满足性能要求,有良好的应用价值[14];
② AMESim软件功能强大,融合了机械、液压、电磁等学科的系统模型[15],极大地缩短了产品的研发周期;
③ 能够极大地减小人力、物力的浪费,建立起一套完整的液压仿真模型;
④ 基于AMESim建立的EHA系统功能模型中,节流孔的流量系数越小,舵面输出位移的稳态误差越小,越接近输入的目标值,进而越能精准控制飞机的姿态变化,提高了飞机的机动性与稳定性[16],对空中加油具有指导性的意义。
