不同绳网材料对无人机拦截效果的影响分析
2021-06-02刁贞君李忠新
刁贞君,李忠新
(南京理工大学 机械工程学院, 南京 210094)
随着信息、光电、材料、控制等相关技术的深入研究,无人机技术深入到人们的日常工作生活中,无人机的广泛运用在提高生产效率的同时,其滥用、“黑飞”问题也严重影响航空安全。近年来,众多无人机在集会、机场等重要场合的“黑飞”事件造成了严重的社会影响。现有的反无人机系统总体上可以分为干扰阻断、毁伤抓捕和监测控制三大类[1],相比于其他两种方式,毁伤抓捕类反无人机系统可以适用于电磁环境复杂且易受干扰的环境,且对比采取直接动能击毁的方法,利用绳网拦截的方式完成无人机捕获,不仅成本低、体积小,也可以避免直接打击所造成的二次损伤。
针对绳网的建模与碰撞仿真问题,目前国内外研究人员进行了大量的工作,张江[2]针对绳网动力学建模方式,推导出中心轴线柔索单元模型和集中质量绳索单元模型,并推导出基于非线性弹簧阻尼模型和库仑摩擦模型的碰撞力和摩擦力公式,给出了碰撞检测的流程以及碰撞检测判据;刘彤等[3]通过Verlet数值积分方法结合弹簧-质点模型建立飞网,并通过点到组合体的距离判断捕获阶段是否发生碰撞;胡明[4]利用LS-DYNA软件结合有限元方法,对警用网弹内展开网捕捉球体进行了仿真分析;Benvenuto等[5]利用罚刚度碰撞方法对绳网捕获正方体目标过程进行仿真,分析了碰撞过程绳网的位形变化。
1 绳网拦截无人机失效分析
1.1 无人机的工作原理
常用的无人机多为四旋翼形式,其主要由4个电机、4个旋翼、机架、电池、遥控、飞控等组成[6]。其结构形式如图1所示,四旋翼无人机通过改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。无人机做垂直运动,是通过同时增加4个电机的输出功率,增大旋翼转速,使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便垂直上升。无人机完成俯仰运动,是通过改变电机1、3的转速,保持电机2、4的转速,由此产生的不平衡力矩实现的。无人机的水平运动,是通过使无人机发生一定程度的倾斜,从而使旋翼拉力产生水平分量,实现无人机的前后运动。
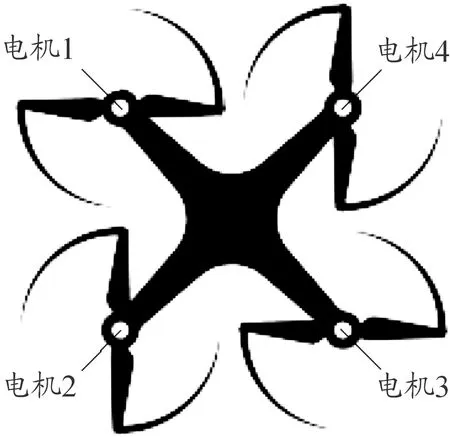
图1 四旋翼无人机结构形式示意图
1.2 绳网拦截原理
从旋翼无人机的组成结构来看,其旋翼及电机的正常使用决定了无人机的飞行稳定。由于四旋翼无人机的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,其陀螺效应和空气动力扭矩效应均被抵消。当无人机其中某一个旋翼失效,都将导致无人机受力不平衡,出现无人机胡乱翻滚的现象。绳网拦截无人机过程中,绳网使四旋翼无人机的旋翼发生转速不规则改变,通过破坏无人机的受力平衡,使无人机失去控制,完成拦截目标。本文的绳网及牵引体是利用弹丸在外弹道过程时受到的离心力完成展开过程,因此在下文中针对旋转绳网拦截过程进行了仿真分析。
2 旋转绳网拦截仿真分析
本文主要研究旋转绳网对于旋翼的旋转运动影响,为了提高计算效率,将旋翼模型设置成刚体,其网格划分结果如图2所示。
图2 旋翼网格划分示意图
根据上述的绳网拦截原理,针对旋转绳网拦截无人机过程,取单一旋翼作为仿真对象,分析不同材料的旋转绳网对旋翼作用效果的影响。为了简化拦截模型,在不影响结果的情况下,针对旋转绳网拦截过程做如下假设:
1) 旋转绳网在与无人机旋翼接触碰撞前始终保持网形展开;
2) 所模拟的无人机旋翼与绳网接触为近距离接触,二者之间为相对直线运动,忽略绳网重力及绳网飞行的阻力;
3) 接触分析中,牵引体与绳网速度相同,不考虑牵引体形状等其他因素对绳网的影响。
2.1 动力学模型
绳网拦截过程的动力学模型包括绳网动力学模型即绳网的建模和绳网碰撞模型的建模两部分。利用有限元原理对绳网进行离散化处理,将绳网离散化为若干个微元段,采用桁架单元来模拟每个微元段构建绳网[7]。
桁架单元之间的张力为Tij,即
(1)

(2)
式(2)中:E为弹性模量,由绳索材料决定;Aij为绳索截面积。
桁架单元由节点i指向节点j的单位向量为:
(3)
忽略地球引力和大气的作用,在旋转绳网拦截过程中,绳段所受外力为绳段与无人机旋翼的接触力Fi。
设某节点i的质量为mi,节点i在惯性坐标系下的动力学方程可表示为:
(4)
2.2 有限元模型
本文针对旋转绳网拦截过程中绳网的非线性特点,采用ABAQUS/Explict模块[8]对旋转绳网拦截过程进行动力学仿真,将发射后完全展开的旋转绳网与无人机旋翼作为仿真对象,仿真旋转绳网与旋翼的拦截捕获过程,在仿真模型中取旋转绳网的中心点作为整体坐标系的原点,Z轴垂直于绳网面,绳网与旋翼的拦截仿真模型如图3所示。
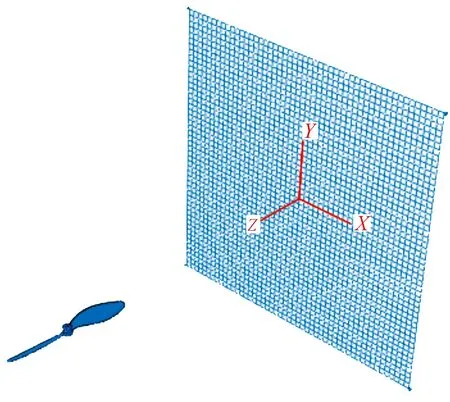
图3 拦截过程仿真模型示意图
图3中旋转绳网采用网目为正方向的正四边形网,为了简化仿真,4个牵引质量块简化为实心球体的形式,对旋转绳网采用三维桁架单元T3D2进行网格划分,绳网被划分为5 100个单元,将牵引体采用三维实体单元C3D8R进行网格划分,单个牵引体被划分为638个单元,将旋翼采用三维实体单元C3D10M进行划分,旋翼被划分为15 451个单元。
针对旋转绳网拦截过程中绳网与旋翼的接触定义,采用罚函数原理,其基本原理是在每一时间步上模拟计算各节点相对位置,从而判定从节点对主面的穿透状况[9]。当二者存在穿透时,在主从面间出现界面接触力,由于旋翼为刚体,根据主从面选择的基本原则,设定此旋翼面为主面,接触的旋转绳网为从面,罚函数因子为0.3。
2.3 仿真参数
旋转绳网的网体尺寸为2 m×2 m,网格大小为0.04 m×0.04 m,网绳的截面直径为1.2 mm,旋转绳网的预定义旋转速度为80 rad/s,沿Z轴正方向速度为50 m/s,绳网材料选取目前常用的4种绳网材料,其参数如表1所示。
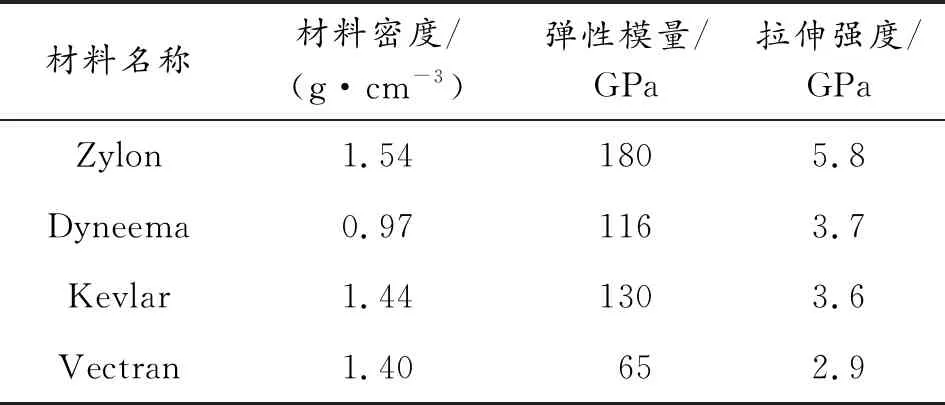
表1 绳网材料参数
仿真过程中,将旋翼和牵引体进行刚性约束,旋翼及牵引体材料参数分别见表2和表3。旋翼的预定义旋转速度为600 rad/s,沿Z轴负方向为10 m/s,旋转绳网沿Z轴正方向水平运动同时绕着绳网中心点旋转,绳网与旋翼沿Z轴方向初始距离为2 m,接触仿真求解时间设置为0.6 s,使绳网与各目标接触碰撞初始时刻均为0.03 s,接触时间均为0.57 s。

表2 牵引体材料参数

表3 材料旋翼参数
2.4 拦截评价效果
理想的绳网拦截过程,绳网应当能够快速拦截捕获目标,并避免捕获的目标产生较大碎片,影响拦截可靠性及发射平台的安全。为了衡量不同材料的绳网对旋翼的拦截影响,针对旋转绳网拦截过程,提出以下因素作为评价标准,方便下文进行讨论分析。
1) 接触力Fi:绳网拦截旋翼过程中旋转绳网与旋翼之间的接触力大小,可以衡量不同材料的绳网与旋翼的作用力效果,较小的接触力可降低旋翼产生微小碎片的风险。
2) 旋翼的旋转速度变化量Δω、沿Z轴水平方向速度变化量Δv:旋转绳网拦截旋翼过程中旋翼的旋转速度和位移的变化量,可以衡量不同材料的绳网对旋翼运动状态的影响,单位时间内较大的变化量能够保证拦截的及时性、有效性。
2.5 仿真结果分析
根据上文所得出的评价指标,对旋翼所受到的力及旋翼的旋转速度、水平速度进行分析,分析不同材料对旋翼旋转运动的影响,图4为4种材料在0.06 s绳网开始缠绕旋翼的效果图。
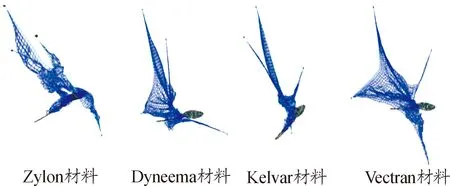
图4 0.06 s不同材料绳网拦截效果示意图
2.5.1 绳网拦截旋翼的角速度分析
4种不同材料的绳网对旋翼转速的影响见图5。当0.03 s后,旋转绳网与旋翼之间产生接触,旋翼的旋转速度下降。在0.03 s到0.3 s间,采用Zylon材料的绳网使旋翼的旋转速度下降最快,且相比其他3种材料使旋翼下降的速度值最大。为了保证拦截无人机过程的及时性,需要在较短的时间内使无人机旋翼的旋转速度快速变化,仿真表明,采用Zylon材料在4种材料中对于旋翼的角速度影响最大,能够及时完成拦截任务。
2.5.2 绳网拦截旋翼受到的碰撞力分析
旋翼与不同材料的绳网在Z轴方向0.03 s前,二者间未发生接触,因此碰撞力为零,在0.03 s后二者发生碰撞,不同材料的碰撞力曲线如图6。
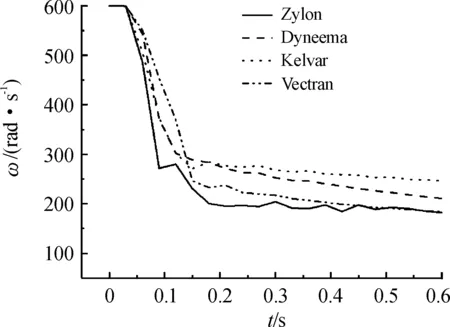
图5 不同材料绳网拦截旋翼的角速度曲线
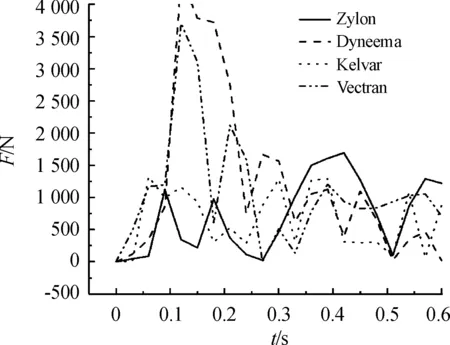
图6 不同材料绳网拦截旋翼的碰撞力曲线
4种材料绳网与旋翼的作用力曲线整体呈振荡趋势。在0.03 s到0.1 s间,旋翼与绳网发生接触,但由于绳段的柔软特性,碰撞力较小,之后当绳网处于抻直状态时,其与旋翼的碰撞力逐达到峰值,Zylon绳网的旋翼在0.42 s时碰撞力最大,约为1 693.15 N;Dyneema绳网的旋翼在0.12 s时碰撞力最大,约为4 417.30 N;Kelvar绳网的旋翼在0.06 s时碰撞力最大,约为1 320.34 N;Vectran绳网的旋翼在0.12 s时碰撞力最大,约为3 706.84 N。为了降低绳网拦截过程中被捕获物产生碎片的可能性,因此拦截过程中二者碰撞力应较小,仿真结果表明:Zylon和Kelvar绳网材料的旋翼受到的接触力相对较小,能够较好地吸收冲击能量;Dyneema绳网材料相比其他3种材料进行拦截时,旋翼受到的接触力较大,产生碎片风险的可能性较高。
2.5.3 绳网拦截旋翼的水平速度分析
在旋转绳网拦截过程中,旋翼在Z方向的速度变化如图7所示。在0~0.06 s之间,Zylon材料的绳网拦截旋翼速度下降最快。仿真结果表明:Zylon材料的绳网拦截旋翼时,对Z方向的速度影响最大,能够及时完成拦截任务。
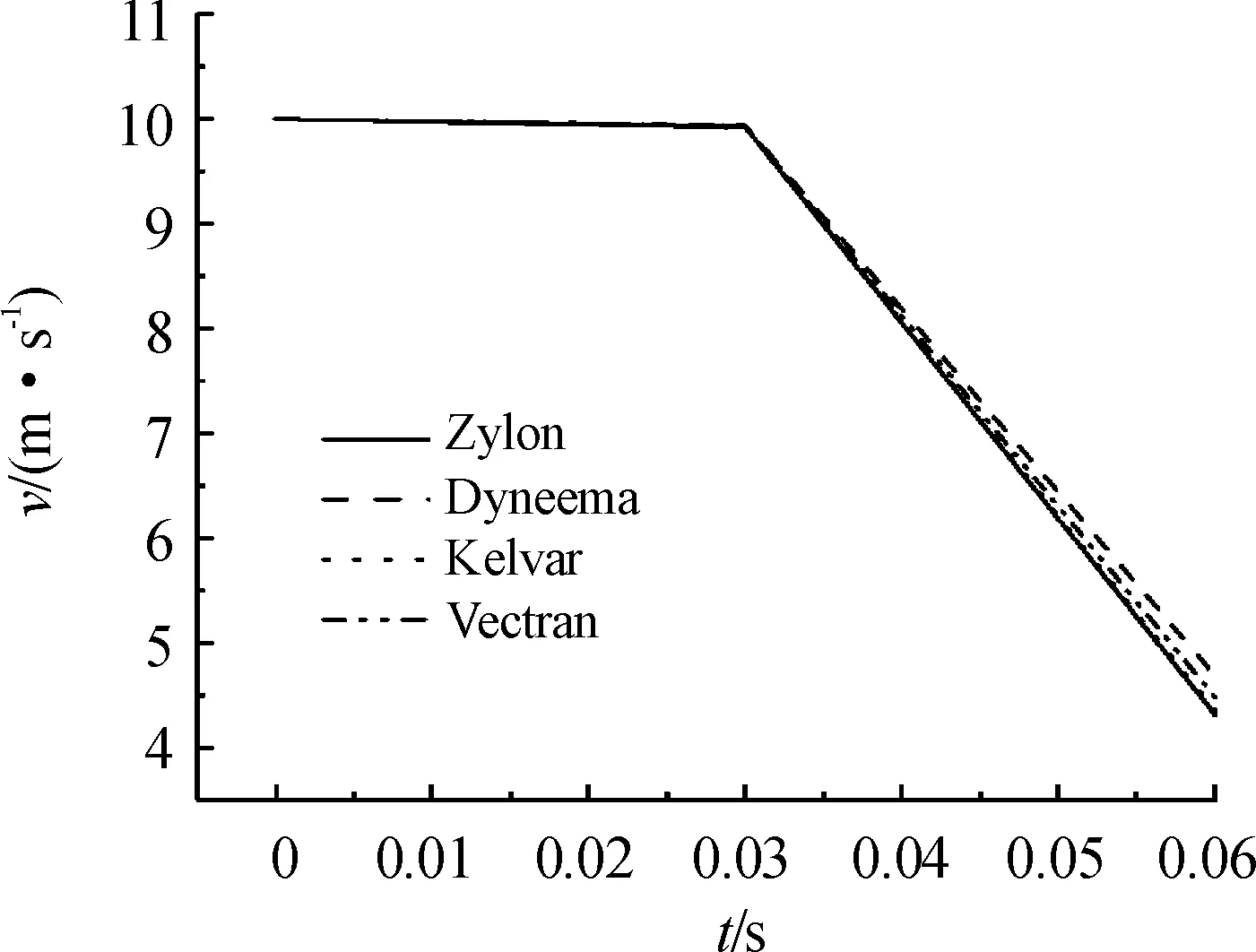
图7 不同材料绳网拦截旋翼的水平速度曲线
3 结论
1) 通过旋转绳网拦截可以快速改变旋翼的角速度,破坏其受力平衡,完成对四旋翼无人机的拦截捕获。
2) Zylon材料的旋转绳网拦截无人机旋翼,相比其他三种材料,在接触发生的0.03~0.3 s内,其角速度变化及Z方向的速度变化量较大,能够及时完成拦截过程。
3) Zylon和Kelvar材料的旋转绳网拦截无人机旋翼时,相比其他2种材料旋翼碰撞力较小,能够较好地吸收冲击能量,Dyneema材料受到的碰撞力较大。
