基于灰色系统和分水岭优化算法在解决图像提取与分割中的研究
2021-05-28宋妙然李子豪魏泽涵
宋妙然 李子豪 魏泽涵
(华北理工大学,河北 唐山063200)
1 问题背景
随着我国科学技术的进步和经济水平的提高,对于卫星方面的技术研究也越来越重视。测绘卫星一直是对地观测系统中比较重要的组成部分,其技术需要不断的革新,才能够满足社会环境的发展要求。资源三号卫星作为中国第一颗自主的民用高分辨率立体测绘卫星,为国土资源、农业、林业等领域提供服务,耕地数量和质量作为农业可持续发展的关键,利用卫星遥感影像可以识别并提取耕地,并对耕地进行遥感制图,准确的耕地分布能够为国家决策部门提供重要支撑。如何快速识别并统计大范围内的耕地数,是我国乃至全世界目前都需要攻克的难题。目前高精度的耕地信息提取主要依靠人工进行翻译,人力财力耗费较大且效率低下,因此如何设计一种较为合理的遥感图像识别算法是本文的核心问题。
2 问题分析
本文中最为重要的是对于耕地部分图像的提取,利用图像分割,根据像素值的大小实现这一目标。然后利用分割得到的图像,对边缘坐标进行提取得到相关数据。利用所提取的坐标值进行处理,将每个分割的图像的坐标数据进行分类处理,并计算多个分割的不规则图形面积。分割图像链接,首先判别图像的像元值是否为0,推断出其是否是该图像的边缘,利用分水岭分割算法,得到遥感图像的最终分割结果,从而生成所需绘制的标签图。
3 模型的建立和求解
3.1 图像分割- 分水岭算法。图像分割- 分水岭算法采用区域分割的一类图像分割方法,在对目标彩色图像进行分割的过程之间,此类算法会将临近相邻栅格像素间的一致性作为权重极高的参考依据。将在位置相邻近且灰度值一致性较高的栅格像素点接连起来形成一个相对密闭的轮廓形状。该类算法的使用步骤为:灰度化彩色图像,梯度图的求解,然后在梯度图的基础上进行图像分割- 分水岭算法,以找到分割图像的边缘线。
在真实问题中所遇到的图像,由于噪声点乃至其它影响因素的存在,使用图像分割- 分水岭算法经常存在分割过度的现象,究其原因这是由于过多且过小的局部极值点的出现。
针对此种问题,本文采用基于mark 的分水岭算法来解决。
3.2 基于mark 的分水岭算法。通过利用经验知识,来使用分水岭算法,以便获得更好的图像分割效果。通常所处理的mark 图像,是定义了一些灰度层级在某个区域,在所定义的区域被洪水淹没过程中,水平面的高度与定义的高度持平,这样就可以避免一些相对较小的噪声极值区域的过度分割,从而达到减少乃至避免分割过度的现象。
3.3 基于SUSAN 算子的边缘检测算法。作为一种基于灰度的特征点获取的SUSAN 算子方法,其可以使用在图像中边缘及其角点的检测中,通过去除图像中的噪声,从而达到减小分割过度的现象。
使用圆形模板,当圆形模板全部处在目标或背景中时,SUSAN 区域面积呈现最大;此时,我们对模板向目标边缘移动时,SUSAN 区域面积逐渐变小;当模板中心移动到角点时,SUSAN 区域呈现最小值。由此可以发现,我们可以通过计算每1 个像素的USAN 值,并与设定的阈值进行比较,如果该像素的USAN 值小于阈值,我们则认为该点是1 个边缘点。
3.4 基于SUSAN 算子边缘检测的坐标提取模型。利用EVNI 软件对附件所给标签图进行数字化处理,利用SUSAN 算子边缘算法进行边缘坐标提取。
分区图像边缘坐标数据提取:
利用MATLAB 以及open-cv 等途径对于分割后的图像进行边缘的提取。
使用SUSAN 算子能够在图像的拐点的地方提取出比较连续的轮廓边而且不涉及梯度的运算,减少了大量的工作量,从而使得对复杂光谱图像进行边缘检测所呈现的效果明显优于传统的图像边缘检测算法。同时,此算法进行图像处理的结果与我们所用模板的尺寸和颜色、对比度等参数选取的联系不大,能较为完整得地保留图像的特征结构等细节信息,得到较为光滑的边缘图像。
通过对图像中每个像元与中心像元之间灰度差的计算得到该板的灰度差直方图。同时,根据灰度差直方图利用迭代法计算该模板的阈值,使对比度不同的图像都可以计算出对应模板下合适的t 值。
首先对模板中每个像元I(x,y)与中心像元I0(x0,y0)的灰度差值进行计算,作为迭代初始值。T0即
然后,利用迭代初始值对灰度差直方图进行分化处理,分成二部分,计算下一个迭代数据,即

其中,k 为此图像中图像中像元点和与中心像元点的灰度之间的差值;h(k)为图像中具有该灰度差值的点的数量;Mmax为灰度差值的最大值。每进行一次迭代后进行判断,若|Ti+1-Ti|=0,则迭代停止,取Ti+1作为分区图像的最后灰度差阈值。因为每个图像的阈值T 是根据图像内的灰度差值确定。
通过对图像内部每个像元的灰度值和模板中心像元的灰度值进行比较,得出结论,如果图像内某个像元的灰度与图像中心像元灰度之间的差值小于阈值T,在本文中则认为该像元与核具有相同的灰度。
根据图像分辨计算可得出

I(x,y)和I(xc,yc)分别为图像中心像元与图像中其他像元的灰度值。c(x,y)为特定区域得像元,T 为确定相似程度的阈值。
根据边缘固定阈值以及得到得像元,可以计算出相应的像元个数,

在确定像元个数后,根据边缘固定阈值确定每个图像分割后的边缘坐标数据。
3.5 基于类鞋带定理的分割图像面积计算模型
提取坐标之后,对于分割图像边缘坐标数据进行有规则的处理,将每个分割的图像的坐标数据进行处理,并计算多个分割得不规则图形的计算。
不过这里有两点需要注意:
(1)对于任意多边形,我们看到的只是各个顶点的坐标,是没有标A1,A2,A3,…,An的,所以这里我们只需要任意指定一个顶点为A1,然后按照顺时针或者逆时针进行标号就可以了。
(2)因为我们是任意指定一个点为A1,且顺时针或者逆时针都可以,所以有时候按照公式计算出来是为负值。但是面积是一个正值,因此我们公式中是有一个绝对值的对于一个多边形,根据其各个顶点的坐标可以计算出面积。

那么由这些坐标所围成的图形的面积为:
其中xn+1=x1,yn+1=y1
3.6 基于mark 的分水岭算法的图像分割模型
分水岭分割算法把图像看成一幅地形图,其中,亮度比较强的区域像素值较大,亮度暗的区域像素值比较小。通过寻找汇水盆地和分水岭界线对图像进行分割,在分割时根据题中所给条件划分图像的种子区域,适当分割区域,避免造成不必要的麻烦。
对于分割后的图像作进一步的处理,首先假设分割后的图像为U0,该图像经分割后得到n 个区域,所以得

si表示第i 个区域的大小,Gi表示第i 个区域的平均灰度值。
3.7 标签图的绘制
利用matlab 等软件对模型进行数据实现,对图1-2 进行标签图画处理。

图1 Test1 遥感图像
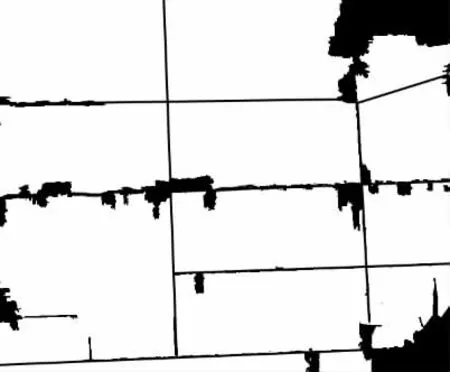
图2 Test1 降噪处理标签图
4 结论
我国土地辽阔、地貌复杂,一般的扫描方法无法实现高精度,高效率的进行特定地形扫描,在本文中,采用的基于mark 的分水岭分割算法和SUSAN 算子边缘检测的算法,首先对于卫星提取的遥感图像进行识别、分割、提取,并结合灰度处理算法进行约束,对于图像进行改进,避免达到过度分割的现象,并作进一步的检测处理,能够快速、精准的识别出田块。
其中最为重要的便是对于图像分割时阈值的选择,本文采用了灰色处理算法进行约束,从而较大程度上减少了过度分割的现象,相似融合的处理也是为了达到这一目的。与此同时,遥感扫描设备精度的提升及色彩识别能力的提升都在较大程度上影响着耕地的提取精度和效率。
