一种三自由度仿生咀嚼机器人的建模与分析
2021-05-21曹安琪薛建彬
曹安琪,薛建彬
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
咀嚼能力是影响人们消化食物进行营养吸收的重要因素,在实际临床中,或因不同的口腔损伤问题,造成了一部分人的咀嚼障碍难题。国内外学者对此设计出了不同功能的辅助咀嚼机构,统称咀嚼机器人,它可以模拟人类的咀嚼行为,从而帮助医生进行咀嚼运动的研究或帮助患者进行康复训练等。
英国布里斯托尔大学的专家学者们基于Stewart平台研究了六自由度并联机构咀嚼机器人Dento-Munch,它利用6个独立的驱动器模拟人类咀嚼模式,代替下颚周围的咀嚼肌控制下颚平台的运动[1-2]。丛明等人根据人类下颌骨的生物力学结构,利用线性驱动器替代咬肌、颞肌和翼状肌3组肌肉,通过建模与对机器人的运动学分析,设计出了新型咀嚼机器人[3]。
目前,大多数咀嚼机器人是由多电机驱动,虽然可以更好地模拟出人的不同咀嚼轨迹,但是实际上其功能有些冗余。如何将复杂的六自由度咀嚼机器人在不影响基本咀嚼功能的基础上进行简化设计,本文提出一种三自由度的咀嚼机器人[4],将3根驱动杆置于不同平面上,与人类口腔架构吻合度更高,基本可以实现切碎、研磨等功能。
1 三自由度仿生咀嚼机器人的建模
人体的咀嚼运动是三维的,可分为两个阶段,切碎与研磨[5],因此口腔的张合运动和左右运动基本决定了咀嚼运动的进行,而另外的运动则主要是辅助完成咀嚼运动,但是对咀嚼功能的影响相对于这两个运动的影响要小得多。本文咀嚼机器人的设计主要需要实现的就是这两组运动,不难解析出,机构运动的实现需要3个自由度。
常用的三自由度运动机构主要是3-PSR并联机构[6-7],该机构主要由3组运动副构成。参照这样的设计理念,对咀嚼机器人进行设计,如图1所示。外部框架模拟人类的口腔结构,为固定平台,将上颌骨固定在固定平台上,下颌骨与3个驱动液压杆通过球副连接,液压杆通过铰链连接在支座上,驱动杆的设计如图2所示。

图1 三自由度牙齿外骨骼机器人机构图

图2 驱动杆设计图
2 三自由度仿生咀嚼机器人的运动学计算与仿真分析
2.1 三自由度仿生咀嚼机器人的运动学计算
为了描述机器人的运动,设参考坐标系O-xyz与定平台相连。与定平台相连的转动副为B1、B2、B3,xy平面与B1所在平面重合,x轴平行于B2B3连线指向B2,y轴垂直于B2B3连线指向B1,z轴垂直于B2B3连线竖直向上。设相对坐标系O′ -x′y′z′与下颌相连,x′y′平面与3个球副连接点所构成的平面重合,球副为b1、b2、b3,x′轴在b2b3连线上指向b2,y′垂直于b2b3连线指向b1。根据右手定则,可以确定z′轴的方向,如图3所示。设B2、B3距离为2d1,B1到x轴距离为d2,B2、B3到x轴距离为d3,如图4(a)所示,则B1、B2、B3的坐标分别为B1[0,d2,0]、B2[d1,0,d3]、B3[-d1,0,d3]。同理,如图4(b)所示,b1、b2、b3的坐标分别为b1[0,d5,0]、b2[d4,0,0]、b3[-d4,0,0]。
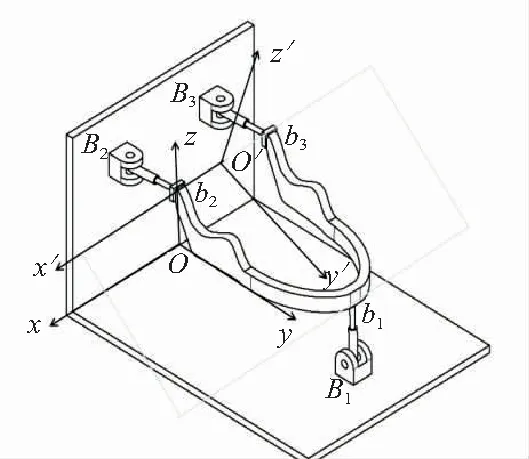
图3 咀嚼机器人结构图
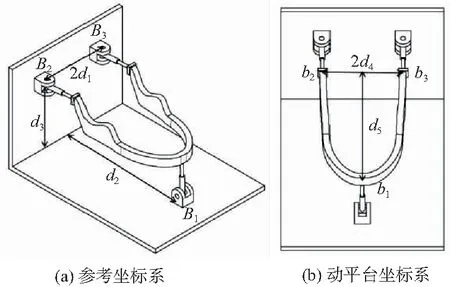
图4 咀嚼机器人坐标系示意图
1)机构的位置反解
机构的位置反解指已知机构的最终位姿,先进行驱动输入状态的反求过程[8]。首先,通过动平台的3个旋转运动,将动坐标系旋转到与定坐标系3个轴的方向都一致的位置,将O′-x′y′z′绕着x′、y′、z′轴朝逆时针方向分别旋转α、β、θ,此时齐次变换矩阵可以表示为:

当动平台的坐标系3根轴经过旋转与定坐标系的3根轴方向一致,那么再经过平移,两个坐标系即可重合,设平移向量为OP=[x,y,z]T。由于设计的咀嚼机器人是三自由度的,只能绕着x轴和z轴进行旋转,沿着y轴进行平移,即β=0,x=0,z=0,此时,有

假设动平台位姿确定,则各个驱动杆li(i=1,2,3)的表示方法即可确定,有:
li=Bibi=R[xbi,ybi,zbi]+OP-[xBi,yBi,zBi]
用Li(i=1,2,3)表示各个驱动杆的长度,联立则可得到机构的位置反解结果,即:
则有:
由上式可以看出,机构的位置反解是3个独立的方程,且d1、d2、d3、d4、d5均为已知量,并且当机构的位姿坐标(α,0,θ,0,y,0)确定的时候,机构的驱动杆的输入也是唯一确定的,机构的位姿反解就可以通过上式求得。
2)机构的位置正解
与机构的位置反解相反,机构的位置正解指的是已知机构驱动杆的输入,进行机构最终的位姿状态求解的过程[9]。对于本文的咀嚼机器人,机构的位置正解指的就是已知3根驱动杆的输入,求解下颌的运动姿态。
为了计算简便,将机构正解所得的非线性方程组进行化简,化简后为:
由上式可以看出,机构的位置正解也是3个独立的方程,当机构的输入为li(i=1,2,3)时,代表着机构的输入已知,则各驱动杆的长度Li(i=1,2,3)已知,方程中只剩下α、θ、y这3个未知量,方程解可以求得,即为机构的位姿解,则机构的位置正解完成。
2.2 三自由度仿生咀嚼机器人的仿真分析
少自由度并联机器人的运动大多具有不确定性,因此,在实际投入使用前,需要进行仿真分析。首先将模型导入ADAMS软件并添加约束,在本次的ADAMS仿真分析中,x轴在颞下颌骨连线上,y轴为机构的垂直轴,z轴垂直于颞下颌骨连线并指向下切牙方向。
1)下颌张合运动仿真结果分析
下颌张合运动指的是下颌绕着颞下颌骨连线的上下转动,因此,y方向的驱动条件设置为sin(2×π×time)×L,其中L为参考点与运动输入的驱动点间的距离,x、z方向固定。选择下颌质心为运动参考点,标记为Marker79,对这个点添加运动驱动。由于仿真过程为动态过程,不便展示,因此使用下颌上的运动输入的驱动点位移曲线来代表,如图5所示。
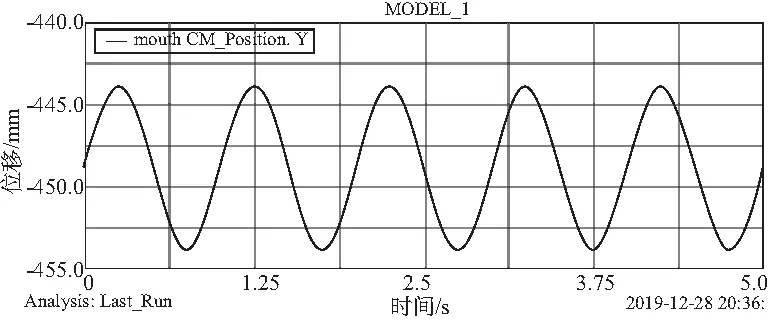
图5 下颌上参考点运动输入的驱动曲线图
将下颌的张合运动模拟为z轴固定,则只有竖直方向的液压杆参与了运动,此液压杆的驱动输入见图6。由位移-时间曲线可以看出,在y方向上,液压杆的运动类似于正弦函数,最大运动幅度约为30 mm,在z方向上也存在类似正弦的运动,运动幅度较小,最大幅度约为0.6 mm,相比于y方向上的运动可以忽略不计。如忽略机构本身的抖动及摩擦力等干扰因素,当运动平台的参考点运动输入为正弦函数的时候,液压杆的位移变化较为平稳,输入也为正弦函数,变化周期同样为2。前文中运动学的位置反解公式已经求出,将参考点的运动输入代入,结果与ADAMS仿真结果一致,说明了分析的正确性与机构的可行性。
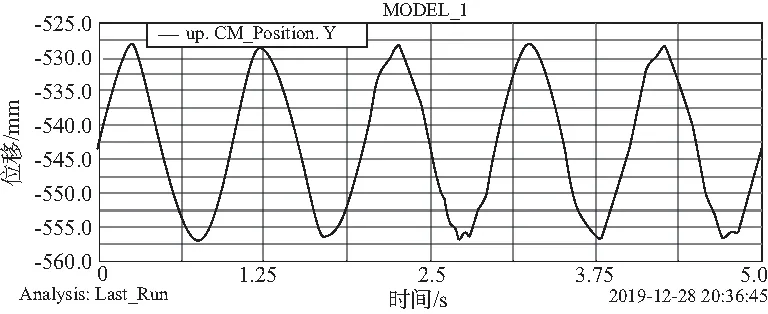
图6 液压杆y轴方向上位移-时间曲线
2)下颌侧方运动仿真结果分析
侧方运动指下颌绕着垂直轴的左右转动,因此可赋予一个围绕着y轴、以前液压杆为参考点的旋转运动作为驱动条件,驱动函数为disp(y)=0.05×sin(1.256×time)。对Marker79即下颌上的参考点添加点驱动,下颌的侧方运动是通过两个液压杆的配合来实现运动的。为了便于分析,将底板上的液压杆作为固定支点,因此侧方运动在z轴并没有发生位移,所以侧面基板上两个液压杆在z轴方向上的运动应该是相反的,仿真结果如图7所示。两个液压杆z轴的运动曲线呈对称,因此位移刚好抵消,实现下颌动平台z轴方向上的零位移。
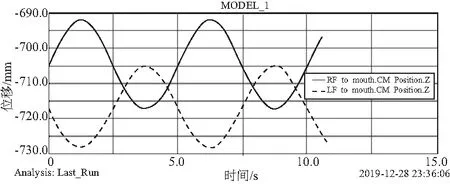
图7 侧面基板上两个液压杆z轴方向上位移-时间曲线
下颌的侧方运动不仅在z轴方向上存在位移,在x轴方向上也同样有着一定的位移关系,但是由于侧方运动是沿着竖直液压杆的旋转运动,因此两水平液压杆的x位移应该保持一致,仿真结果同样验证了这个理论,结果如图8所示。
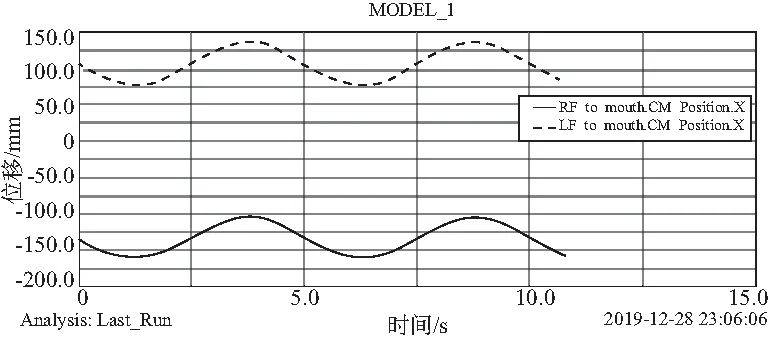
图8 侧面基板上两个液压杆x轴方向上位移-时间曲线
3 结语
本文基于人类口腔架构与人类咀嚼方式等特征,设计了一种三自由度仿生咀嚼机器人。机器人由三组驱动杆构成,每一组驱动杆由一个移动副,一个转动副以及一个球副组成,整个机器人具有三个自由度。完成机器人建模后,对机器人的切碎和研磨两个过程进行运动学计算与仿真分析,验证了设计的仿真机器人可以实现的切碎以及研磨运动的幅度,切碎方向最大幅度为30 mm,研磨方向最大幅度为20 mm,可以满足口腔实际的运动仿真。
