机器人设计与实现
2021-05-14杨晴
杨晴


机器人研究已进入智能化阶段,本文从研究应用的角度出发,通过以PC+运动控制卡为核心,搭建机器人的控制系统平台,在VC++平台下编写控制程序,设计出机器人。
1 机器人硬件设计
1.1 机器人本体
机器人的本体样机如图1所示,该机器人主要由固定基座、腰座、腰部、大臂、小臂和手腕组成。腰部机构与基座固定连接,腰部支撑大臂,大臂连接小臂,最终构成了机器人。
机器人的每个关机都是由RV减速机、伺服电机等部件组成,当电机转动时,RV减速机以一定的传动比带动部件旋转,由此产生相对运动。各个关节的减速比分别为1:58、1:121、1:121、1:45、1:75和1:75。大臂和小臂在竖直面内做俯仰的位置运动,手腕部分三个关节分别作横滚、俯仰和偏转等位姿运动。
1.2 机器人控制系统的硬件组成
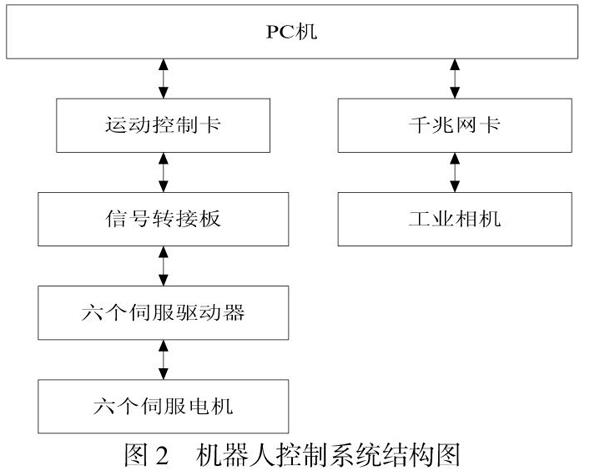
机器人控制系统采用PC机+运动控制卡开放式控制系统平台,上位机由PC机(Windows XP操作系统平台)组成、下位机由阿尔泰PCI1040运动控制卡构成,采用三洋交流伺服驱动器和伺服电机,以及信号转接板和其他一些控制电路。视觉系统通过德国MTec公司的Halcon软件进行开发,硬件部分采用德国的Balser型号为acA250014gm的工业相机和日本的camputer镜头,通过千兆网卡与PC机进行通讯。其控制系统硬件结构如图2所示。
1.3 控制系统的控制线路设计
机器人系统的电路部分,主要由主电路、控制信号接口电路(通过转接板连接)、通讯电路、机器人本体与控制实驗台接口电路、限位开关电路以及其它辅助部分组成,通过对以上电路模块的设计,搭建了该机器人控制实验平台如图3所示。
为了能使机器人具有模块化功能,对六个伺服电路进行模块化设计,独立控制六个伺服系统的供电,达到既能单独控制某个关节又能几个关节一起联动,其中一个伺服电路如图4所示。
机器人6个伺服系统的控制方式都选用位置控制方式,控制器通过转接板给交流伺服驱动器发送使能、位置、速度等指令,并采集伺服驱动器的监视报警等信号。分拣机器人第一关节伺服驱动器CN1接口与控制器转接板J1接口的控制信号接线如图5所示。
为方便机器人每个关节的伺服驱动器与控制器之间信号的发送与接收,利用Altium Designer Summer 09软件设计了控制信号转接电路板,如图6所示。
参考文献
[1]杨小亭,曹义东,宋科. 基于六自由度关节机器人的一种计算机控制系统[J]. 微电子学与计算机,2012,07:192-196.
[2] 北京阿尔泰科技发展有限公司. PCI1040运动控制卡硬件使用说明书.
[3] 孙鑫,余安萍. VC++深入详解[M]. 北京:电子工业出版社,2006.
