基于遗传算法和支持向量机的汽车行驶工况识别
2021-05-13董小瑞武雅文张志文李晓杰
董小瑞,武雅文,张志文,李晓杰
(中北大学能源动力工程学院,山西 太原 030051)
新能源汽车在实际工作中,复杂和多变的行驶工况会对汽车控制策略产生干扰,造成汽车的能耗经济性下降。如果可以根据工况实时调整汽车能量管理控制参数,那么就可以提高汽车对路况的适应能力,并使汽车的动力性能及节能效果达到最优[1-6]。因此准确地识别行驶工况变得至关重要,可为新能源汽车后续的能量管理策略制定打下坚实的基础。当前国内外针对工况识别进行了大量的研究。姜超等[7]依据混合动力地下铲运机的工作特点,采用可能性C均值聚类算法对铲运机的5种典型工况进行了识别,但是该算法容易受聚类中心初始值的影响,且该算法时间开销很大;孙蕾等[8]选取了3类标准循环工况,并提取了11个特征参数为训练数据,建立了学习向量量化(LVQ)神经网络工况识别模型,而神经网络对样本容量有依赖性;Chen等[9]基于模糊逻辑控制在线校正算法对短期未来行驶工况进行预测,但是模糊算法中的隶属度函数大多靠经验选择,需要反复调试。
针对上述问题,本研究选择支持向量机(SVM)算法对行驶工况进行识别,SVM在非线性分类、模式识别上有着广泛的应用,识别精度高,泛化能力强,但是识别效果上受SVM模型相关参数的影响。而遗传算法具有强大的全局搜索能力,可以在很短的时间搜索到全局最优点,所以为了提高支持向量机算法的识别精度,本研究将遗传算法优化和SVM算法相结合,优化模型参数,建立优良的行驶工况识别模型。
1 理论基础
1.1 支持向量机识别算法

(1)
式中:ω为权值向量;b为阈值。
对于数据中的异常点,SVM算法通常进行软间隔处理,为此需要引入负松弛因子ξi和惩罚系数C(控制松弛程度),优化问题转化为
(2)
为解决上述线性约束凸优化问题,通常转化为拉格朗日对偶函数求解[10]:
(3)
解得最优分类平面为

(4)
式中:a*为最优解。
对于非线性问题,通常引入一个核函数将原数据映射到一个高维空间中。定义核函数:
K(xi,xj)=(φ(xi))Tφ(xj)。
(5)
在识别算法中应用最广泛的核函数为高斯径向基函数:
K(xi,x)=exp(-g‖xi-x‖2)。
(6)
式中:g为核函数宽度,只需把原问题的(xi·xj)替换为K(xi·xj)即可解决。
惩罚系数C和核函数宽度g的取值对支持向量机的识别精度有很大的影响,因此需要找到最优的C和g值。
1.2 基于遗传算法优化的SVM识别算法
遗传算法(GA)是模拟自然界生物进化现象发展起来的随机全局搜索优化方法,把搜索空间映射为遗传空间[12]。将可能的解编码成一个染色体,每个染色体通过选择、交叉和变异三种算子来进行操作运算,整个种群在优胜劣汰的进化机理下进化发展,直到进化到最优状态。遗传算法具有极强的搜索精度和求变功能,并且不易陷入局部最小值。
本研究提出基于遗传算法优化的支持向量机行驶工况识别算法(GA-SVM),算法流程见图1。
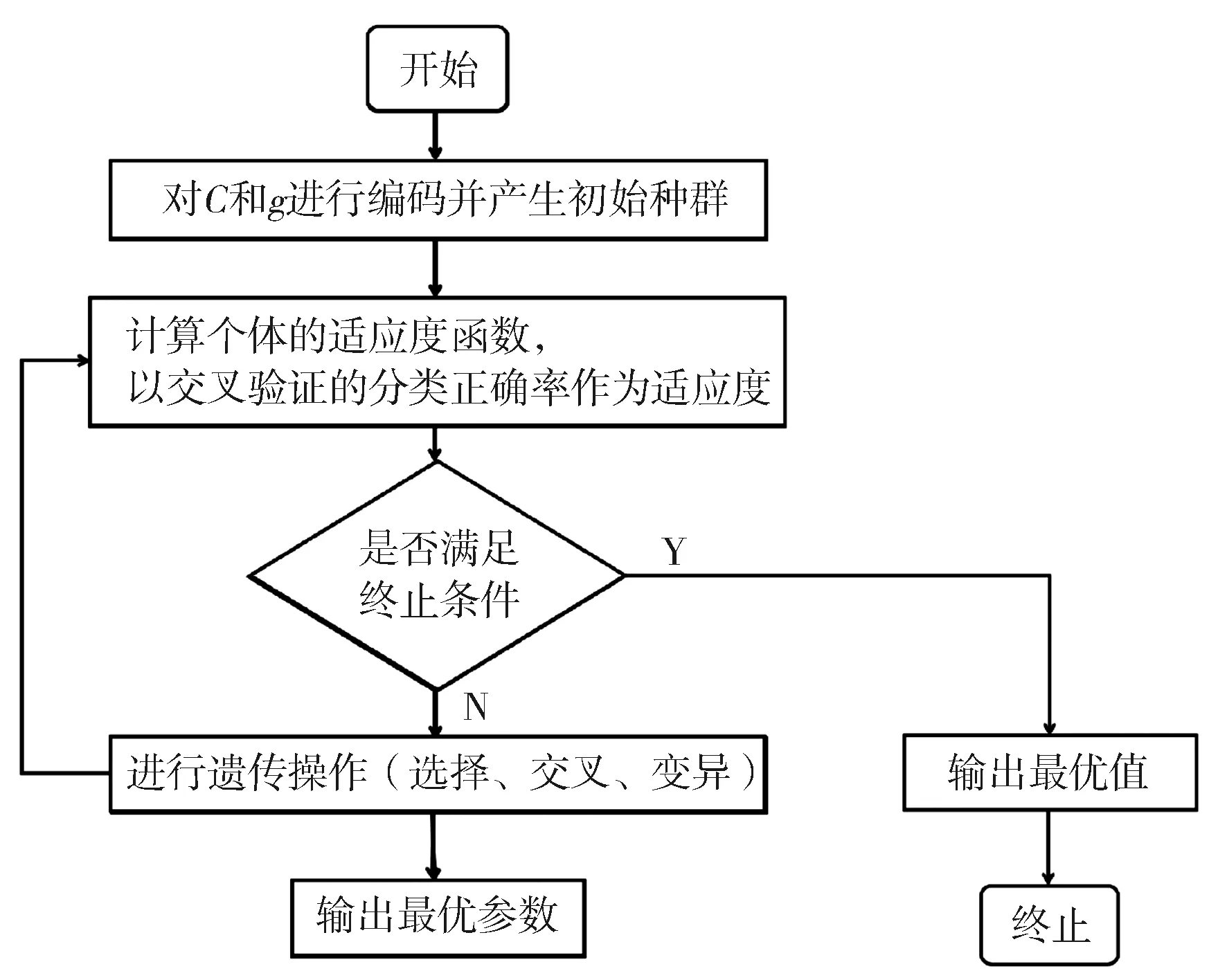
图1 GA-SVM算法流程
GA-SVM算法的基本步骤如下:
1) 网格搜索法粗搜索,设定惩罚因子C和核函数宽度g的搜索范围和步长,合适的步长有助于缩短搜索时间。
2) 根据网格搜索法,通过交叉验证法,得到粗搜时最优的C*和g*值,作为下一步遗传算法寻优的依据。
3) 编码:设定遗传算法寻优参数的范围,其中C的范围为[mC*,nC*],g的范围为[mg*,ng*],并采用二进制编码。
4) 生成初始群体:随机产生M个初始个体。
5) 计算个体的适应度:以支持向量机交叉验证法的分类准确率作为评价每个个体适应度的指标。
6) 选择,交叉,变异。
7) 终止条件判断:设定迭代次数,当迭代次数达到T时,终止运算,输出最优解。
2 行驶工况处理
2.1 数据采集
在行驶工况识别的研究中,一般将城市工况分成4类典型工况,即拥堵工况、城区工况、郊区工况和高速路工况[5]。1)拥堵工况:大部分集中在城市繁华地带,怠速时间长,启停频繁,汽车平均速度低;2)高速路工况:行驶在高速公路上,交通畅通,汽车车速高,行驶距离长;3)郊区工况:位于城市郊区,启停少,巡航时间占比较高,行驶时间较长;4)城区工况:主要集中在城市的生活区,交通流量较大,启停较为频繁,怠速时间较长。本研究将这类典型工况分别标记为1,2,3,4。
本研究以某城市为例,使用一辆轻型汽车在该城市的4类典型工况实际路段采集工况数据(采样频率为1 Hz),从采集设备上读取CAN信号中的GPS速度、行驶时间、加速度,扭矩百分比等信号,并保存在电脑中进行后续处理。
2.2 数据处理
本研究计划采集4类典型工况各100条行驶工况运动学片段,即汽车从怠速状态开始至下一个怠速状态开始之间的车速区间,每条片段应同时包含怠速、加速、减速、巡航这四种运动状态,且每种状态至少持续4 s。
由于汽车行驶数据的采集设备直接记录的原始数据会包含一些不良数据值,需要对原始数据进行预处理,包括对异常值的删除、缺失值的补齐和噪声的滤波等,超长怠速时间段也需要剔除。处理后的4个典型工况运动学片段见图2。
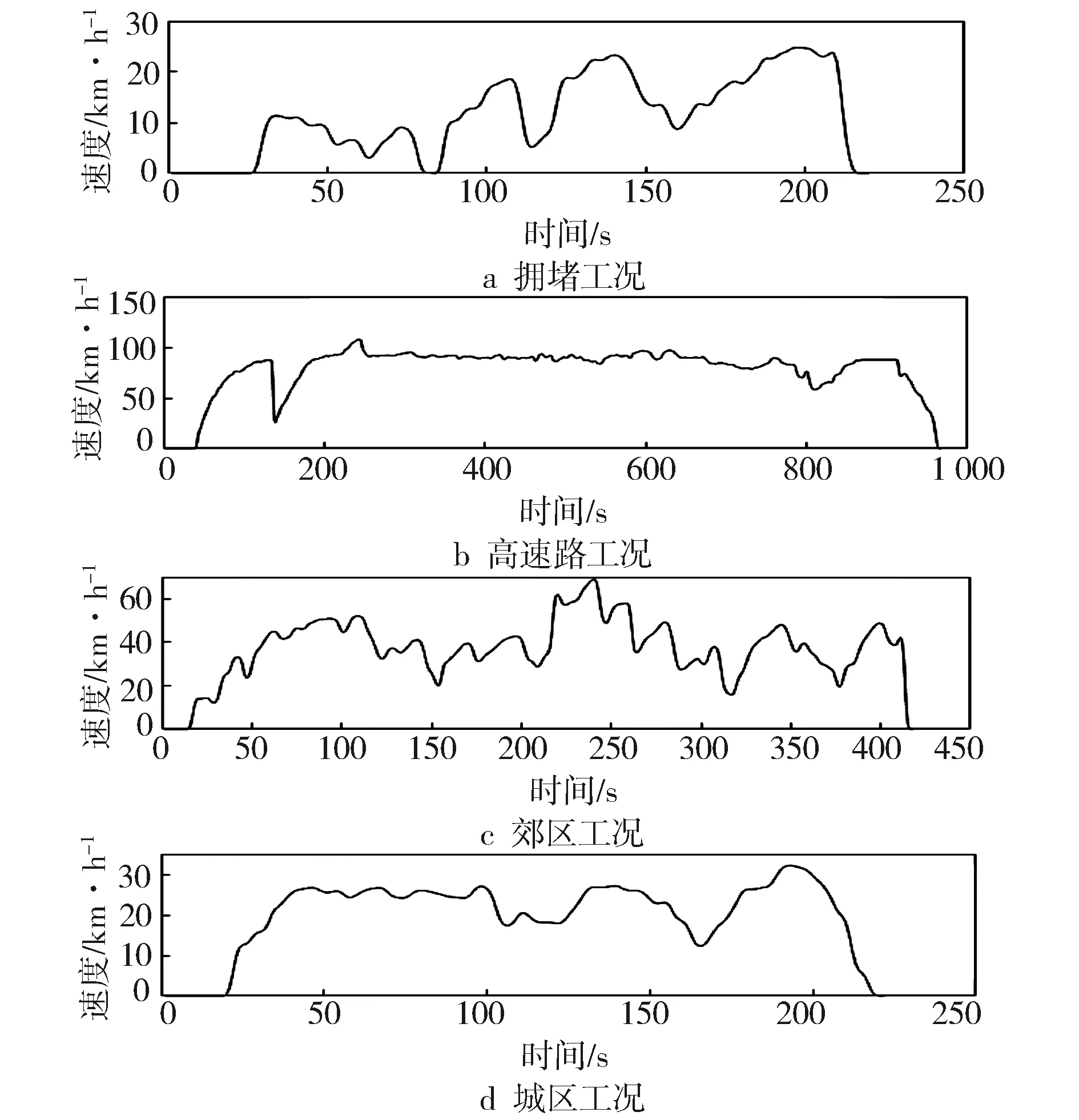
图2 典型行驶工况运动学片段
2.3 提取特征参数
为了保证行驶工况识别的准确率,需要足够并有效的工况识别特征参数,这些特征参数既要反映车辆运行特性,又要反映速度波动特性。原则上选取的特征参数数量越多,描述行驶工况特征信息的能力也就越强,但是计算时间也越长,而数量过少会导致工况信息描述不准确[13]。因此,在前人研究的基础上,选取14个特征参数描述各典型工况运动学片段(见表1)。
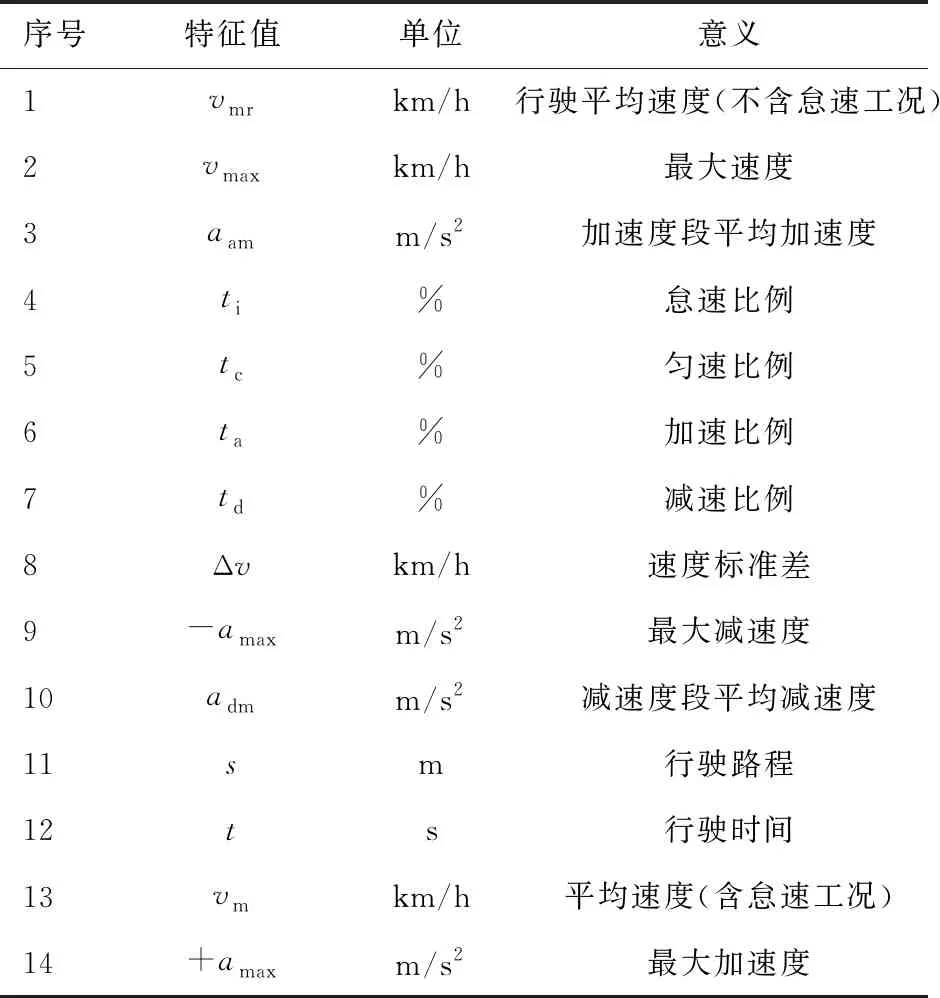
表1 汽车行驶工况特征参数
2.4 主成分分析
通过选取的14个特征参数对工况运动学片段特征进行表述,但如果直接使用这14个参数对运动学片段进行分类,计算时间长且处理繁琐,故需要找出这14个参数之间的关联性,将表述信息重叠的参数归为一类。这就需要利用主成分分析法(PCA)对其进行降维处理,主成分分析法是利用线性变换相关知识,使用少数几个相互无关的变量代替原来的多个变量,并且可以综合反映原始数据的大部分信息。具体步骤如下。
1) 对原始数据进行标准化处理。
本次试验共采集了400条行驶工况运动学片段,每条运动学片段都有14个参数对其进行描述,即构成了一个400×14型的矩阵Z,将矩阵Z进行标准化处理。
2) 判断各个变量之间的相关性,计算各个数据之间的相关系数。
由标准化后的矩阵Z计算得到协方差矩阵C,并进一步计算得到相关系数矩阵R。
3) 计算相关系数矩阵的特征值。
求得相关系数矩阵R的特征值,并按从大到小顺序进行排列。
4) 计算主成分贡献率和累计贡献率。
本研究采用SPSS软件对400个行驶工况运动学片段的14个特征参数数据库进行主成分分析(PCA),得到14个主成分特征值和累计贡献率(见表2)。
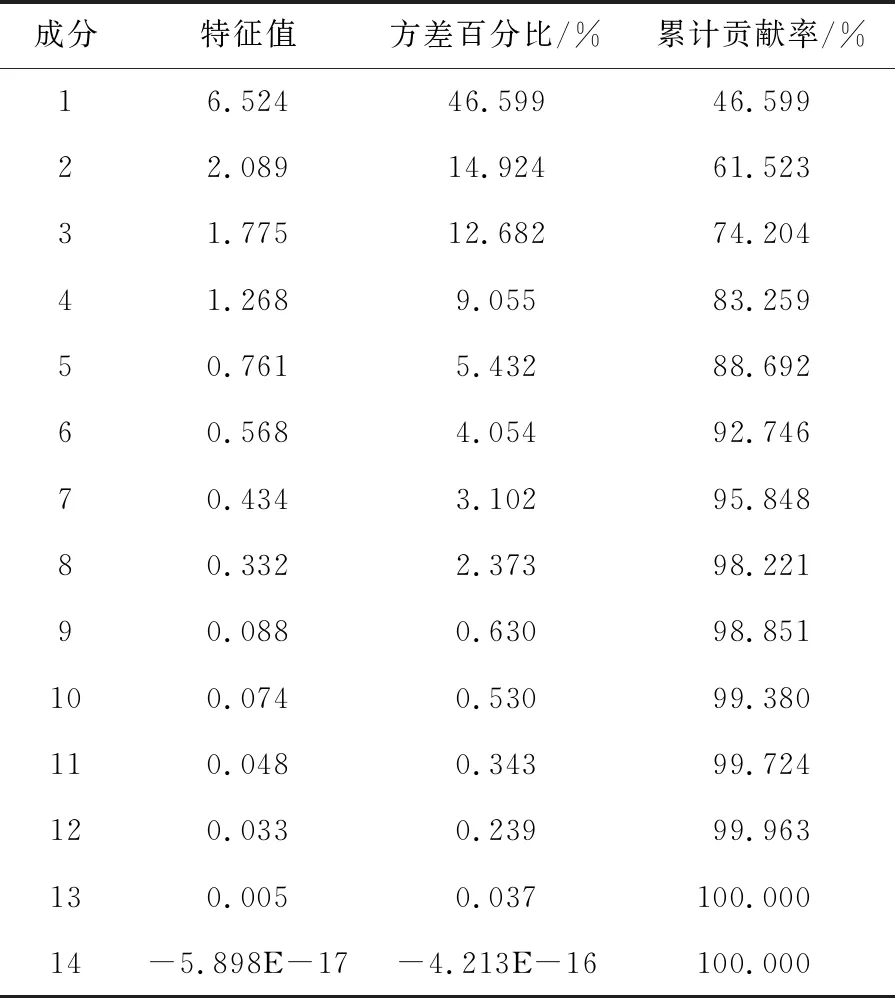
表2 各主成分特征值及贡献率
表2中的特征值是主成分原始特征参数信息的表示,该值越大,对应的主成分包含原有的14个特征参数信息就越多。当主成分的特征值小于1时,一般不会采用,因为当特征值小于1时说明此主成分表达的信息不如原有的一个特征参数所表达的信息充分,达不到降维目的[14-15]。故选用主成分时,一般采用特征值大于1的成分。从表2看出,前4个主成分的特征值都大于1,且累计贡献率为83.259%,超过了80%,说明这4个主成分就能代表原有的14个特征参数充分表达工况特征信息,因此,选择前4个主成分作为GA-SVM识别算法的输入参数。
3 模型训练及仿真分析
本研究以行驶平均速度、最大速度、加速度段平均加速度、怠速比例作为GA-SVM算法的输入参数,从400个行驶工况运动学片段中随机抽取80%作为训练样本来训练并建立识别模型,剩下的20%作为测试样本来验证识别模型的精度。
首先基于网格搜索法建立SVM识别算法模型,将C,g分别以2为底的指数离散,设置为C∈[2-4,24],g∈[2-4,24],进行网格寻优,取识别精度最高时所对应的C,g值作为最优值。网格搜索法的寻优过程见图3。

图3 网格搜索法寻优3D图
由图3可以得出,此时最优值C=8,g=1,最优识别精度为94.06%。这种算法的80个随机测试样本的识别结果见图4,由图可见,测试样本有5个样本被错误识别。

图4 网格搜索法SVM分类结果
在此基础上,使用遗传算法进行优化,将种群数量设置为20,最大进化次数设置为50,此时GA-SVM的寻优过程见图5。

图5 GA-SVM算法的寻优过程
由图5得出,此时最优值C=5.35,g=0.93,最优识别精度为97.5%。测试样本的识别结果见图6,由图可见,测试样本中有3个样本被错误识别。
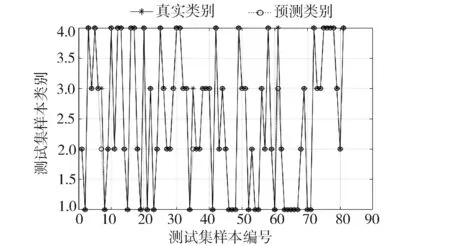
图6 GA-SVM算法分类结果
经过对比,基于GA-SVM算法的行驶工况识别精度相较于网格搜索寻优算法的识别精度提高了3.44%,并且得到了更小的惩罚系数C。在保证识别精度的前提下,C值过大会导致过学习的情况发生,从而降低了识别模型的泛化能力,而C值越小,泛化能量就越强。仿真结果表明,运用基于遗传算法优化的支持向量机识别模型可以很好地识别行驶工况类型。
4 结束语
在某城市的拥堵工况、城区工况、郊区工况、高速路工况这4种典型工况的道路进行实车行驶工况数据采集并进行处理,定义了14个特征参数来描述行驶工况特性,然后利用主成分分析理论对特征参数进行降维处理,提取出4个有效表征行驶工况的特征参数。
在网格搜索法的基础上,提出基于遗传算法优化的支持向量机行驶工况识别算法,并通过仿真试验验证得知此方法在网格搜索法的基础上将识别精度提高了3.44%,同时改善了C值过大导致过学习的情况。所研究的分类模型可以用于新能源电动汽车能量管理策略的开发。
