基于协变量自适应的混合动力车辆能量管理控制策略
2021-05-12胡苏楠朱明亮吴晓东许敏
胡苏楠,朱明亮,吴晓东,许敏
(上海交通大学智能汽车研究所,上海 200240)
混合动力车辆相对传统内燃机车辆具有较好的燃油经济性,其中能量管理策略是混合动力车辆获得良好经济性的关键,能量管理策略的功能是对发动机和电机进行合理的动力分配从而优化整个系统的能量传递。目前,大家做了很多这一方面的研究,形成了各种各样的策略体系,总的来说,可分为两种类型[1-2]:基于逻辑门限的策略和基于优化理论的策略。相对于基于逻辑门限的策略,基于优化理论的策略可以获得更好的控制效果[3]。
基于逻辑门限的策略的核心思想是设计一系列逻辑规则,将发动机的工作点限制在高效区间内[4-5]。这种方法相对来说容易实现,也不需要复杂的计算,但是逻辑规则设计依赖于工程经验,并且不能覆盖所有可能的混合动力车辆的动态特性。此外,策略的控制效果还和工况有关。对于基于优化理论的策略,动态规划(DP)是典型的一种,在已知工况情况下DP可以获得全局最优的燃油经济性[6-7]。由于DP必须提前已知工况,所以很难在实际道路上使用,而且超大的计算负荷也是DP实时应用所要解决的一个问题,但是DP的最优结果可以作为其他策略的参考。模型预测控制(MPC)是另外一种能量管理的方法[8-10],MPC的特点是需要预测未来工况,工况预测的准确度影响这个方法的控制效果。
等效燃油消耗最小化策略(ECMS)[11]和庞特里亚金极小值原理(PMP)[12]也属于基于优化理论控制策略,这两种方法通过实时考虑车辆的瞬时特性来实现瞬时优化。这两种方法本质上是相同的,PMP中的协变量和ECMS中的等效因子具有相同的含义,它们名字不同是因为公式的表达方式不同[12]。ECMS以其简单而有效的表达方式被广泛使用,ECMS的关注点在于如何确定每个瞬时的等效因子。文献[13]使用了一个输入为SOC偏差值的PI控制器来实时调整等效因子。文献[14]和文献[15]都采用了模糊控制器调整等效因子,所不同的是,文献[14]模糊控制器的输入为SOC和SOC偏差值,而文献[15]为偏差值和发动机转速。和文献[13-15]的思路一样,文献[16] 也是为了维持SOC而调整等效因子。文献[17]在预知不同程度的工况信息条件下提出了相应的策略,结果表明,如果提前获取车速或行驶距离这些工况信息,可以明显地改善经济性。文献[18]从更加符合实际的角度出发,研究了工况信息中的地形对改善经济性的影响,同样证明了预知部分工况信息会带来经济性上的提升。文献[19]利用从全球定位系统(GPS)、地理信息系统(GIS)和智能交通系统(ITS)中获得的历史交通信息建立了一种自适应策略:首先,建立了一个传动系统能量流模型,计算出车辆行驶过程中电能和燃油能量等能量表达式;然后,利用交通信息来计算等效因子变化范围;最后,根据能量流模型中实时的能量表达式确定控制等效因子变化的可能性参数。文献[20]从预测的角度出发,基于车辆过去和当前速度利用recurrent神经网络做了一个20 s的车速预测,然后将DP使用到预测的速度中。在这个过程中,全局最优问题被转为几个局部最优化问题的叠加。考虑预测速度和在精确度上的困难性,文献[21]使用神经网络模型来预测车辆需求能量,为了减少预测的计算量,预测过程只需要几项参数。然后使用一个数学模型将需求能量转换为参考SOC。最后采用PID控制器控制等效因子来使SOC跟随参考SOC。文献[22]分析大部分预测类策略存在的问题,如使用神经网络带来的大量计算和预测选用的参数忽略了车重和天气等条件,然后提出将表现在变速器上的需求输入扭矩和转速用来描述一个工况的参数,并用机器学习算法来学习工况和一个k-nearest neighbor(k-NN)预测算法来预测工况。文献[23]没有尝试通过预知部分工况信息来改善经济性,而是从能量角度分析等效燃油消耗最小化问题,从中推导出最优等效因子范围。这个范围与工况无关,只与车辆架构有关,是传统系统动力部件平均效率的函数。然后利用SOC调整等效因子在最优等效因子范围内,其方法得到良好的控制效果。在此基础上,文献[24]引入了SOC软约束和硬约束的概念,使得动力分配控制实现了更优的效果。
以上文献中的自适应策略都显示了较好的燃油经济性,然而每种方法都或多或少存在以下几种问题:1)为了维持SOC而忽视了经济性;2)历史交通工况信息与实际行驶工况不符或预测的工况与实际工况存在偏差;3)简化了影响等效因子变化的关键表达式。为了避免以上方法所存在的问题,本研究提出了一种新的基于协变量自适应的方法来实现优化控制。协变量自适应是指协变量的选取遵循全局优化的特点——同一工况下,控制策略获得的经济性越好,发动机工作就越高效。因此协变量选取的原则和目标是使发动机工作高效,那些能让发动机工作在高效区间内的协变量将会被选取并保留至下一时刻,否则将会被更新调整,直到发动机工作点回到高效区间。策略分为三步实现:首先,建立一个模糊控制器对车辆需求能量进行分级,为了减轻需求能量预测的工作量,能量分级仅依据两项动力参数确定。然后,利用预测的需求能量级别调整高效区间的效率以改变高效区间的范围,同时也会调整本研究所设计的SOC软约束范围。最后,在所设计的SOC软约束范围内,协变量依据高效原则自适应调整,这个过程与SOC无关;超出SOC软约束协变量由SOC来调整。其中第一步和第二步是围绕协变量自适应而展开的,其目的是进一步合理地优化动力分配和控制SOC范围。
1 车辆建模与控制方法
1.1 动力系统建模
车辆动力系统架构由内燃机、电机和电池等组成(见图1)。为了便于分析车辆能量管理过程,建立了动力系统的数学模型。在该模型中需求功率是当前车速与期望车速之差经过一个PI控制器,然后转换为油门踏板和制动踏板信号获得。

图1 动力系统架构图
根据车辆行驶过程中的动力学平衡关系,可得以下功率方程式:
(1)
式中:v为车辆车速;me为整车质量;Pload为包括风阻、滚动阻力和摩擦力在内的道路载荷功率;ηtrs(rtrs为当总传动比为rtrs时传动系统的效率,在仿真中rtrs根据车速自动调整;PD为表现在发动机轴上的车辆需求功率,由加速踏板和制动踏板信号确定(制动情况下PD为负值)。
发动机采用准静态模型,每个时刻的油耗通过查发动机瞬时燃油消耗率曲线获得(见图2)。
发动机瞬时燃油消耗率数学模型的输入为发动机的输出扭矩TICE和转速nICE。
(2)
这里发动机瞬时燃油消耗是TICE和nICE的函数,但实际上可写成发动机功率(或者需求功率与电机功率)的函数[23,25]
(3)
式中:Peng为发动机的输出功率;Pem为电机的输出功率。

图2 发动机燃油消耗率曲线
在电机模型中,电机的效率通过一个效率表获得。电池消耗的功率Pbatt表达式如下 :
(4)
(5)
式中:nem为电机转速;ηem(Pem,nem为电机效率。
电池模型采用经典的等效内阻模型,本研究中热效应对电池特性的影响忽略不计。
vocI(t=I2(tRint+Pbatt,
(6)
(7)
电池的电流和SOC的导数的表达式为
(8)
(9)

1.2 优化控制方法
基于PMP理论,建立优化控制问题表达式。令电机输出功率Pem为控制变量u,SOC 为状态变量x(t,整个控制问题描述如下:
(10)
(11)
PD=Peng+Pem,
(12)
x(t0=c0,x(tf=c1,
(13)
SOCL≤x(t≤SOCH,t∈[t0,tf],
(14)
(15)
(16)
式中:u*为待求的最优控制;t0为车辆行驶起始时间;tf为车辆行驶的终止时间;c0为起始时刻SOC;c1为终止时刻SOC;式(15)和式(16)为可允许的控制范围。正常驱动模式下,PD为正值,否则为制动模式下的负值。
由PMP可知,最优控制u*可以通过求解哈密顿函数的极小值求得。这个问题的哈密顿函数为
(17)
协变量微分方程为
(18)
式中:协变量p是负值[12]。为了方便后面公式的书写和推导,将p设为正值,于是f(x(t,u(t就变成了-f(x(t,u(t。
通过求解协变量微分方程,PMP的协变量就可以确定,将协变量代入到哈密顿函数中就可以求出哈密顿函数的极小值,进而求出发动机和电机的动力分配。如果SOC的约束范围选取恰当的话,那么SOC对开路电压和内阻的影响就非常小,因此假定开路电压和内阻是个常值[12]。在这个假设条件下,

(19)
2 能量管理策略设计
2.1 协变量自适应
协变量的选取影响发动机和电机的动力分配,由于道路工况和驾驶员行为是未知的,所以协变量取常值是不可取的。在实际情况下如何选取协变量来自适应工况和驾驶员行为是控制策略的核心。本研究中协变量的选取由发动机的特性和SOC决定。
从能量的角度分析,车辆行驶过程中消耗的燃油的能量分为三部分:一部分用于驱动车辆行驶的需求能量Ereq;一部分转化为电池的电能-Ebatt;最后一部分因为传动效率的原因损失的能量Eloss。
Efuel+Ebatt=Ereq+Eloss。
(20)
式中:Efuel为发动机消耗的总能量;Ebatt为电池消耗的总能量。
在起始和终止SOC相同并且需求能量消耗相同的情况下,控制策略获得的经济性越好,意味着发动机浪费的能量越少,发动机工作越高效。换句话说,发动机工作点更加集中地被控制在高效区间——全局优化的特点。所以良好的控制策略要满足一个必要条件:发动机的工作点应该被控制在高效区间。基于这个必要条件,本研究将全局优化和瞬时协变量的选取联系在一起,协变量选取由发动机的工作效率决定。于是,那些能让发动机工作在高效区间的协变量将会被保留到下个时刻,否则将会被更新调整直到保证发动机工作高效。
2.2 协变量更新
当式(17)哈密顿函数中的协变量p确定时,在式(15)和式(16)的约束范围内,哈密顿函数总可以求出一个极小值Pem与p对应:p→Pem,由于PD是已知的,且PD=Pem+Peng,所以对应关系也可写成:p→Peng。由于哈密顿函数里面的发动机瞬时油耗和电机的效率是通过查表得知的,所以p→Peng的具体关系表达式是求不出来的。但定性分析哈密顿函数可以发现,当p增大时,消耗电机功率的代价会增大,哈密顿函数极小值Pem会有减小的趋势,也就是Peng有增大的趋势。这给如何更新协变量提供了一个清晰的方向,比如:当某一协变量下的哈密顿函数极值使得发动机的工作点位于高效区间以下时,可以通过增大协变量来增大发动机的输出功率,将发动机工作点拉高,直到回到高效区间;反之,则减小协变量,将发动机工作点拉低,直到回到高效区间。如何快速地从需要调整的协变量更新到让发动机工作点回到高效区间的目标协变量是协变量更新需要解决的问题。通过分析协变量与对应的发动机功率之间的关系,本研究给出了一个可以以较快速度趋于目标协变量的公式。

(21)
求得协变量更新起点为
2.公职律师与政府法律顾问。政府法律顾问专指依法接受政府聘请,以自己的专业知识和技能为政府提供多方面法律服务的专业人员。政府法律顾问一般由社会律师担任,依据双方签订的聘用合同开展各项服务工作。法律顾问不是政府公务员,其服务具有阶段性和外部性。而公职律师是隶属于其服务对象的,是服务单位的内部人员,其职责范围较之政府法律顾问更为广泛,不仅包括为政府提供法律咨询意见,而且包括参与政府规范性文件的起草、审议及修改,代理参加诉讼和仲裁,受政府委托代办具体的法律事务等方面。可见,公职律师不等同于政府法律顾问。

(22)
p=p'estimate+Δp。
(23)
式中:Δp为更新步长,当发动机工作点在高效区间以下时,更新步长为正值;当发动机工作点在高效区间以上时,更新步长为负值。通过以上方法可以保证所选取的协变量能够获得良好的控制效果。

图3 p→Peng关系曲线示意
2.3 协变量上下限的推导

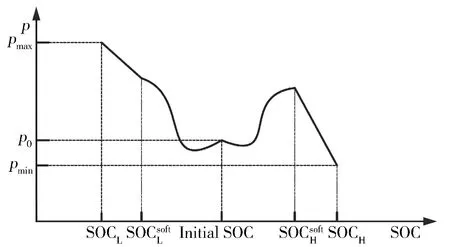
图4 SOC硬约束和软约束与协变量的关系
协变量的上下限值pmin和pmax由哈密顿函数推导而来。为了求pmin和pmax, 这里定义几种电机输出功率的状态,即uhm,ubm,uem和ucm,分别表示车辆工作在混合驱动模式(hm)、纯电动模式 (bm)、纯发动机模式(em)和充电模式(cm)。
分析哈密顿函数发现,协变量取值越大电机正向驱动的代价越高,即电机输出功率有减小的趋势。当协变量取值充分大时,哈密顿函数的极值解使得车辆工作在纯发动机模式,此时电机输出功率为0。这个可以由以下表达式保证:
H(uhmorubm≥H(uem,
(24)
(25)
其中,Pem>0,当Pem=PD时,不等式左边就是H(ubm。
这个结论通过进一步分析哈密顿函数来验证。如图5所示,不管H(ucm是否小于H(uhmorubm,只要保证H(uhmorubm≥H(uem,哈密顿函数的极小值就不会落在uhm或者ubm,这种情况下SOC不会下降。虽然哈密顿函数曲线可能类似于协变量为p2对应的曲线(虽然哈密顿函数不满足H(uhmorubm≥H(uem,但是极小值落在ucm),但是本研究所要求的pmax应该充分大。显然p2不是充分大,且比p1小。

(26)
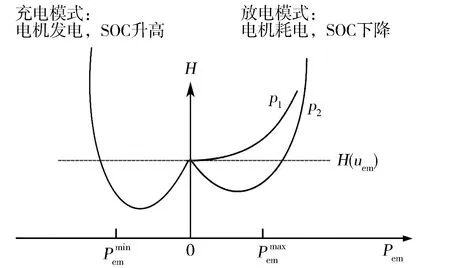
图5 哈密顿函数下的不同工作模式
求解不等式
(27)
因为
(28)
所以pmax可以写成
(29)
同理,当协变量越小时,电机正向驱动的代价越小,电机输出功率有增大的趋势。当协变量充分小时,哈密顿函数的极值解会使车辆工作在纯电动模式,此时发动机输出功率为0。这个可以由以下表达式保证:
H(ucm≥H(uem,
(30)
(31)
求解不等式
(32)
因为
(33)
所以pmin可以写成
(34)
根据式(29)和式(34),协变量的上下限pmax和pmin可以通过PD、Pem和在允许范围内变化的发动机转速求出。当SOC超出软约束范围时,协变量的选取由以下公式确定:
(35)
2.4 高效区间和SOC软约束的设计与调整
分析发动机特性可知,对发动机效率要求越高,发动机可输出的范围越小,从而发动机可输出的动力越小。所以需要协调好高效区间中的效率要求和发动机的动力输出能力。本研究设计的高效区间具有两个特点:1)考虑到低转速区和高转速区的发动机效率普遍比中间转速区明显低的特点,高效区间设计为“椭圆状”,如图6所示。图中,转速两端的效率要求比中间部分小,以扩大两端的扭矩范围。2)利用交通系统中的历史工况信息对“椭圆状”高效区间进行缩放。从历史交通数据预测出未来道路需求能量,若需求能量级别高则降低高效区间中的效率,以扩大发动机动力输出范围,否则就保持正常的较高的效率要求。

图6 “椭圆状”高效区间
本研究采用一个模糊控制器来实现需求能量级别的预测。模糊控制器的输入基于历史数据,为未来100 s内的平均车速和最大加速度。图7示出NEDC、WLTC和UDDS工况下每个时刻的未来100 s内的平均车速和最大加速度曲线。

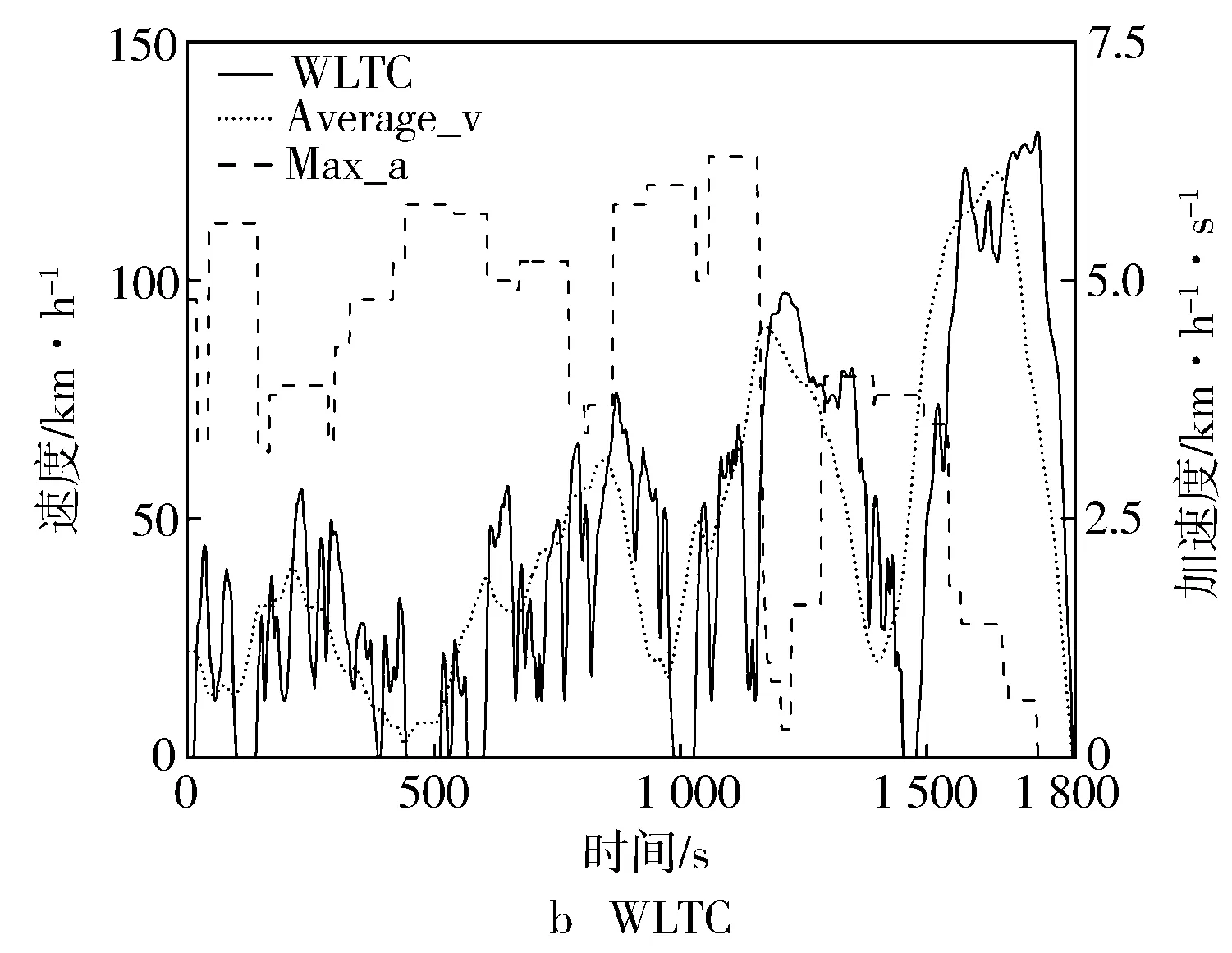
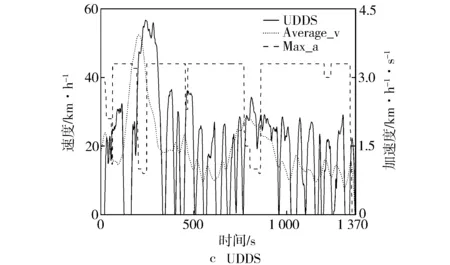
图7 标准工况NEDC、WLTC和UDDS的每个时刻下的未来100 s内的平均车速和最大加速度曲线
模糊控制器的输出为连续的需求能量级别,大小在0~10之间,级别越高,需求能量越高。能量级别为0~5和级别为10所对应的高效区间的效率要求如表1所示。级别为5~10所对应高效区间的效率要求在级别为5和级别为10时所对应的效率要求范围之间按照比例关系确定。
模糊控制器的输入和输出的隶属度函数如图8所示,模糊规则设计如图9所示。NEDC、WLTC和UDDS 3种标准工况经过模糊控制器后的能量分级情况如图10 所示。由图7和图10可以发现,UDDS整体车速不高,但整体加速度比NEDC和WLTC都要高,导致UDDS的能量级别较高。这是因为在模糊控制器的设计中,更加侧重保证车辆加速过程的动力输出能力。

表1 能量级别与效率要求对应关系
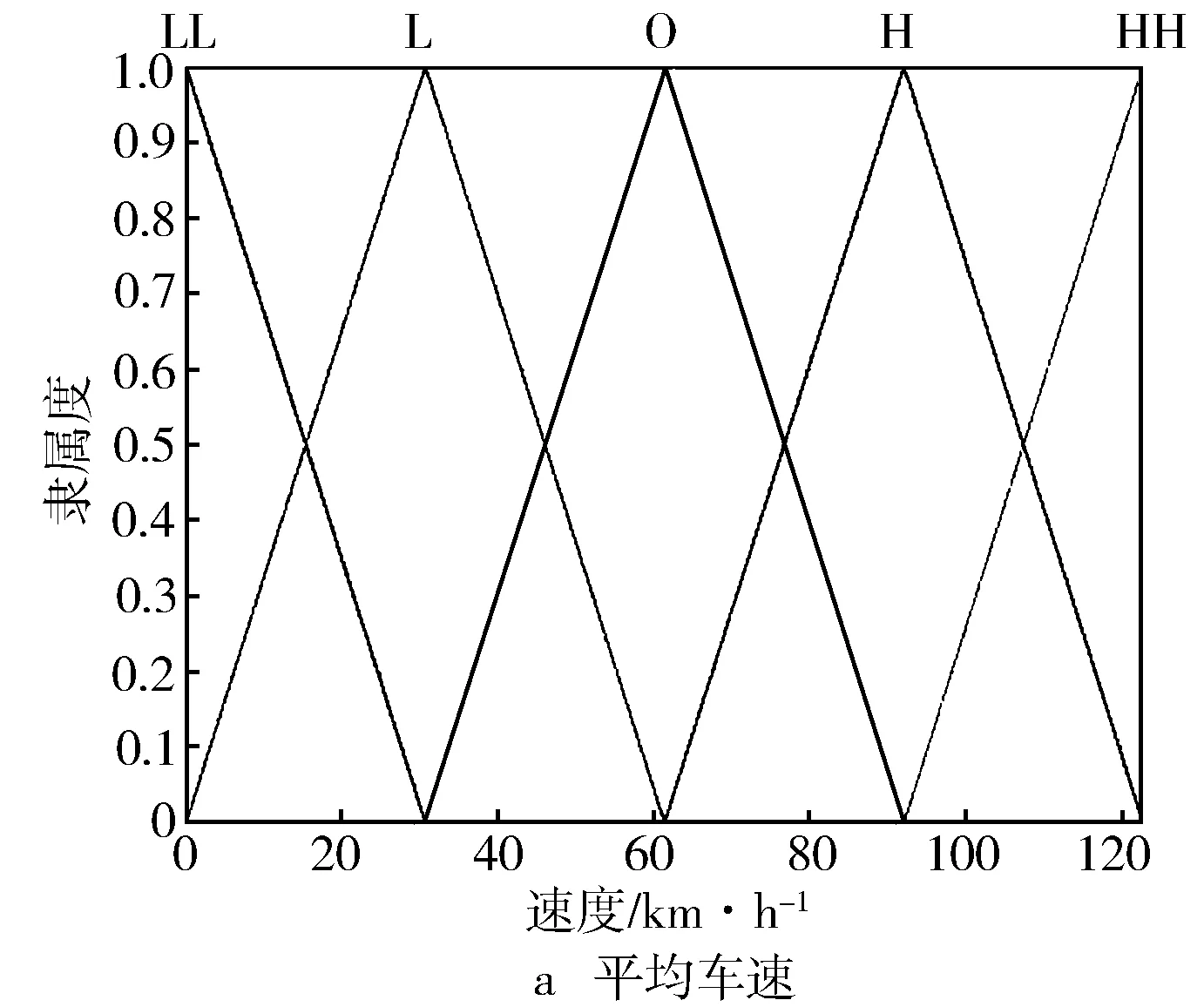
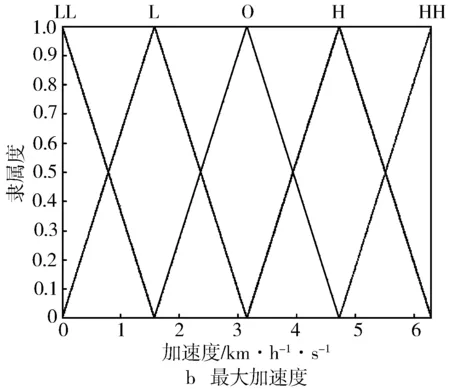

图8 模糊控制器输入和输出的隶属度函数

图9 模糊控制器模糊规则

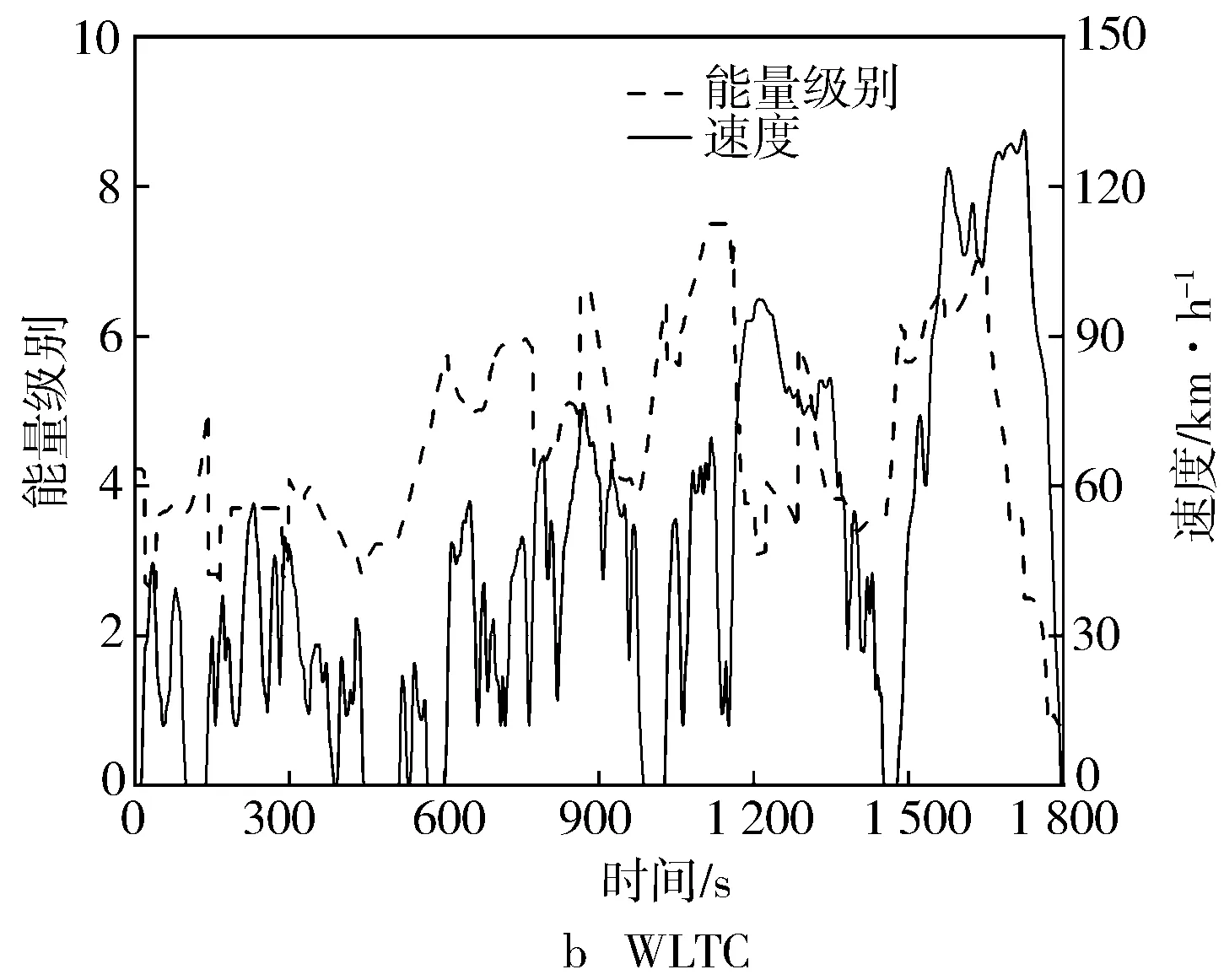

图10 3种标准工况能量分级曲线
对于SOC软约束设计,考虑到大需求功率时,SOC会很快接近SOC软约束边界,在本策略中超出软约束后,车辆会失去混动的特点。虽然这种情况很少,但是为了提前对SOC进行调整,也采用了上述的模糊控制器来控制SOC变化范围。如图11所示,能量级别为0时,软约束上下边界分别为69%和51%,随着能量级别增大,上边界逐渐减小至65%,下边界对应增大至55%。这样可以根据实际需求来灵活调整电池的状态。

图11 能量级别与SOC软约束关系曲线
2.5 整个控制策略流程
经过以上的推导和设计,整个控制策略流程如图12所示。车辆在行驶过程中,以能量分级的方式预测前方道路100 s内的需求能量。然后根据需求能量的级别调整所设计的发动机高效区间和SOC软约束。于是就可以在确定的高效区间和软约束范围内依据发动机工作高效原则自适应的选取协变量。当SOC不在软约束范围内,协变量由式(35)确定。之后车辆模型根据选取的协变量得出车辆的实际车速,驾驶员模型获得实际车速后,控制油门踏板和制动踏板输出一个需求功率,如此往复直至车辆停止。
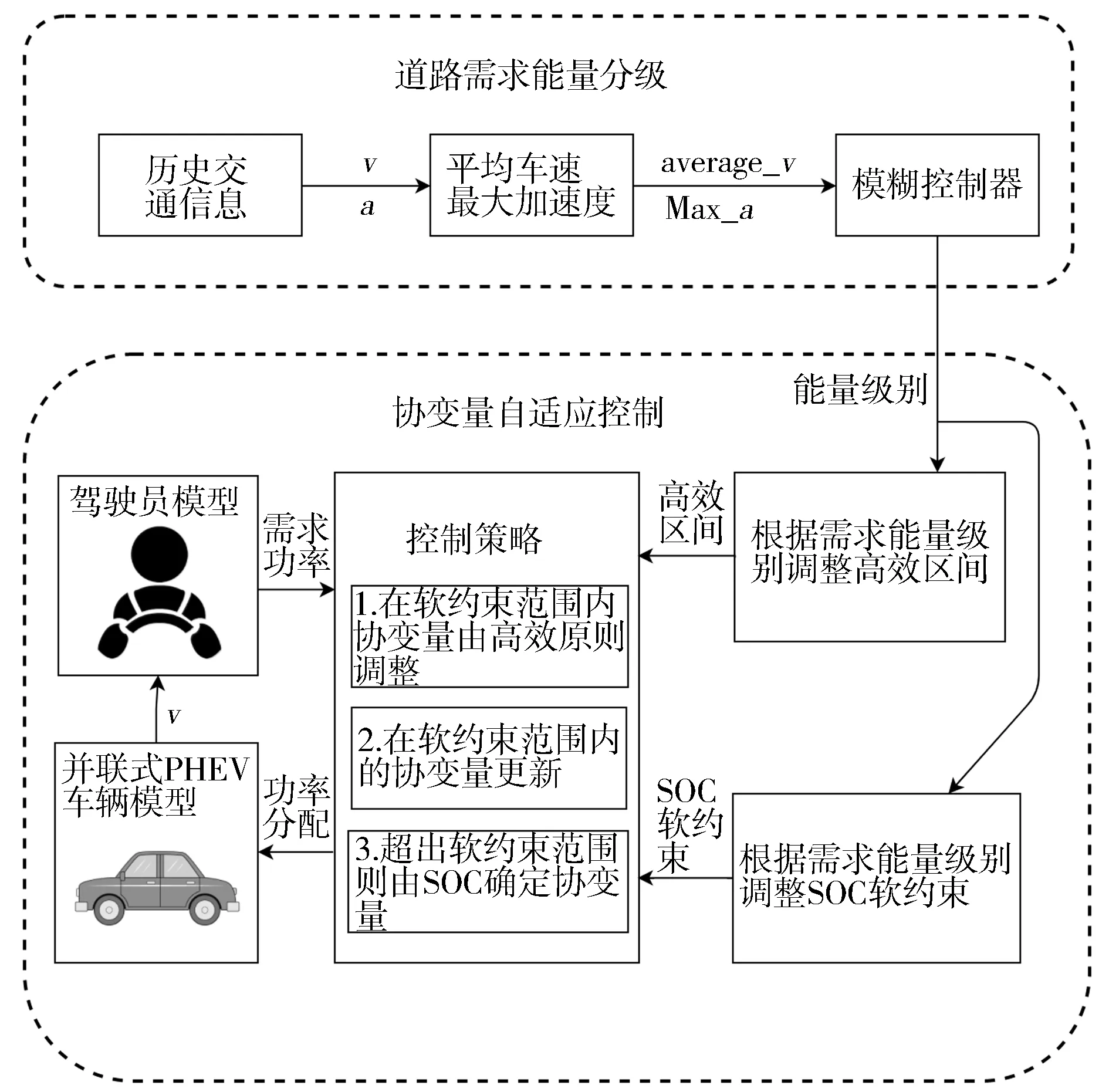
图12 整个控制策略流程
3 仿真结果
为了验证所提出的方法,建立了一个48 V BSG轻型混合动力车辆模型,车辆的主要性能参数如表2所示。为了更好地体现本研究提出的策略(以下称为Proposed strategy)的控制效果和特点,在NEDC、WLTC和UDDS 3种标准工况下将其与另外3种策略进行对比,这3种策略分别为无需求能量预测的基于协变量自适应的策略(Proposed strategy without prediction,以下称为WP-proposed strategy)、常规PI自适应策略(以下简称PI-PMP)以及全局最优的PMP策略(以下简称Global PMP)。
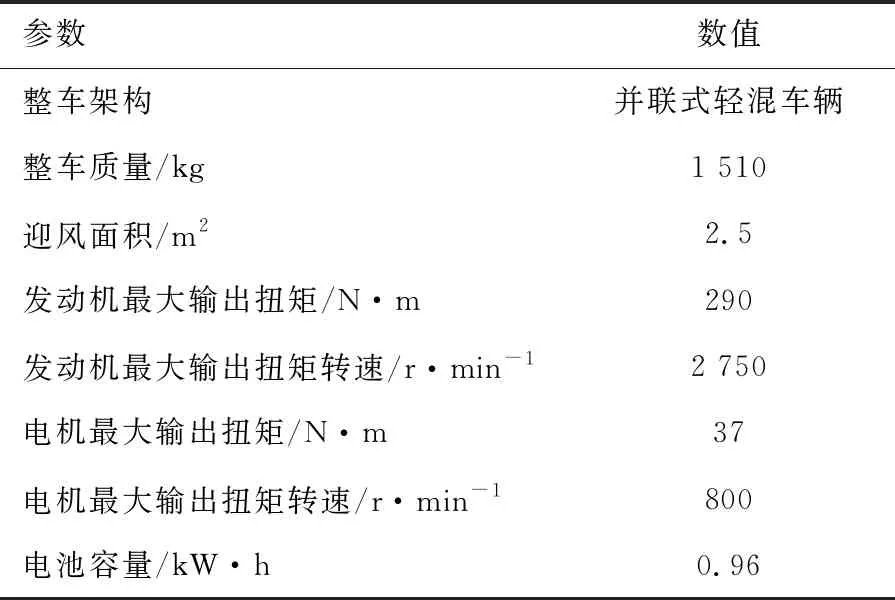
表2 车辆仿真参数
其中,PI-PMP中的PI控制器设计如式(36)所示,控制器的输入为参考SOC与实际SOC的差值。
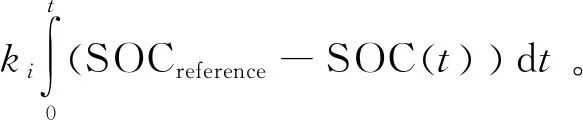
(36)
式中:p(0)和SOCreference分别为初始时刻协变量和参考SOC,3种标准工况对应的值都是10和65%。kp和ki分别为PI控制器的比例参数和积分参数,通过多次仿真试验确定NEDC、WLTC和UDDS工况下的比例参数和积分参数分别1和0.295,1和0.5以及1和0.1。WP-proposed strategy没有需求能量预测过程,其高效区间和SOC软约束均不变动。

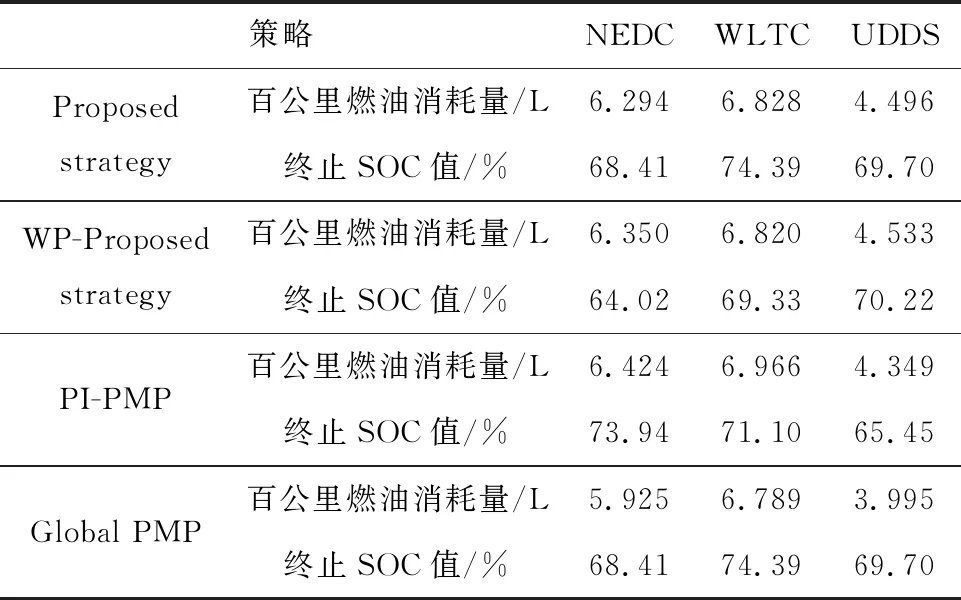
表3 4种策略的经济性和终止SOC
图13示出NEDC、WLTC和UDDS工况下的SOC曲线。3种自适应PMP策略的SOC都被限制在要求范围的50%~80%之内。大部分时间,SOC都在55%~75%范围内变动。
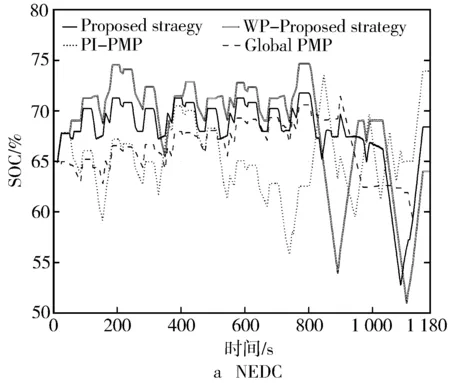


图13 标准工况下4种策略的SOC曲线
Proposed strategy和WP-Proposed strategy的曲线走势非常相似,与WP-Proposed strategy对比,Proposed strategy曲线较低,波动幅度较小。这是由于Proposed strategy利用了需求能量预测,对SOC软约束范围进行了调整,在SOC不断上升或者不断下降的情况下抑制了变化速度。PI-PMP的SOC曲线对比Proposed strategy和WP-Proposed strategy像是被“拴”在一条线上,不自由地上下变动。
图14示出4种策略在WLTC工况下的发动机工作点分布,其中实线为所设计的能量级别为10对应的发动机高效区间的边界,点划线为能量级别为0对应的发动机高效区间的边界。可以发现,Pro-posed strategy和WP-Proposed strategy发动机工作点分布大体一样,局部细节有一些不同。Proposed strategy和WP-Proposed strategy一样大部分点都被控制在高效区间内,高效区间以外的点都是低扭矩的点,主要包括以下两种情况:1)当SOC超出软约束时,发动机点不受效率原则控制而受SOC影响,这种情况会产生高效区间范围之外的点;2)当电机输出最大动力却仍然不能将发动机工作点从高效区间以下拉到高效区间下边界以上时,策略执行发动机单独工作模式。对于PI-PMP,发动机工作点分布整体偏高。
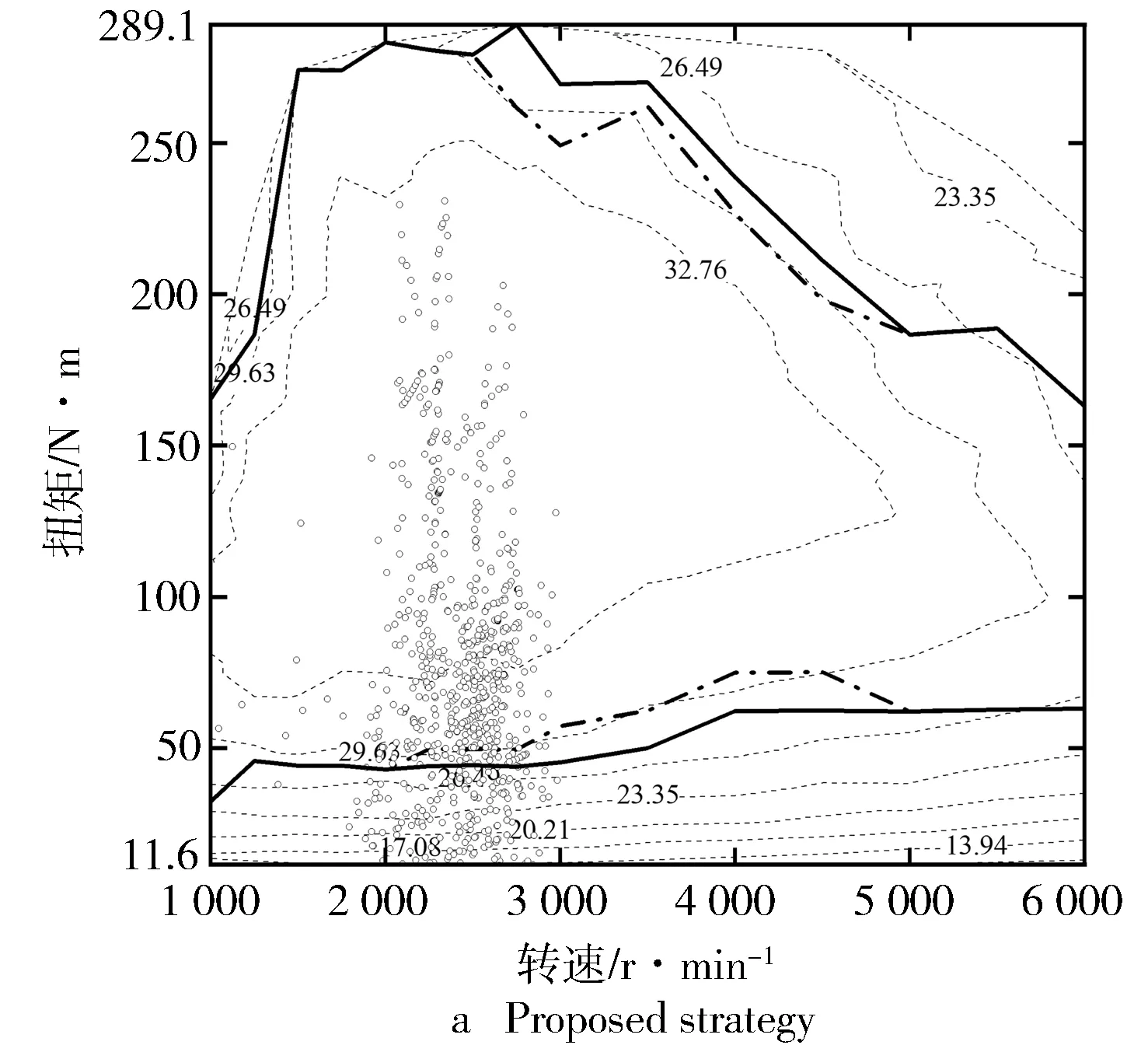
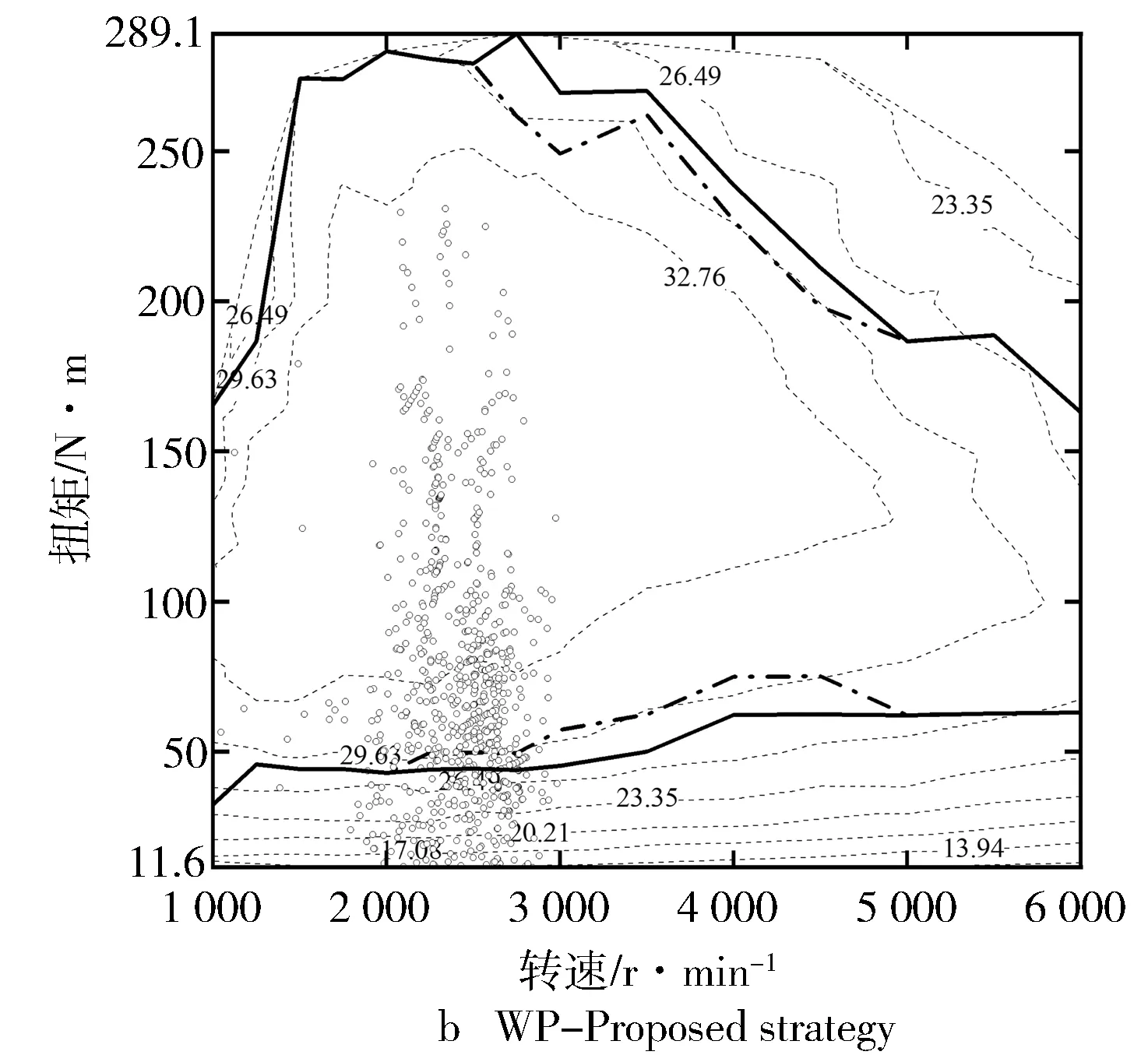
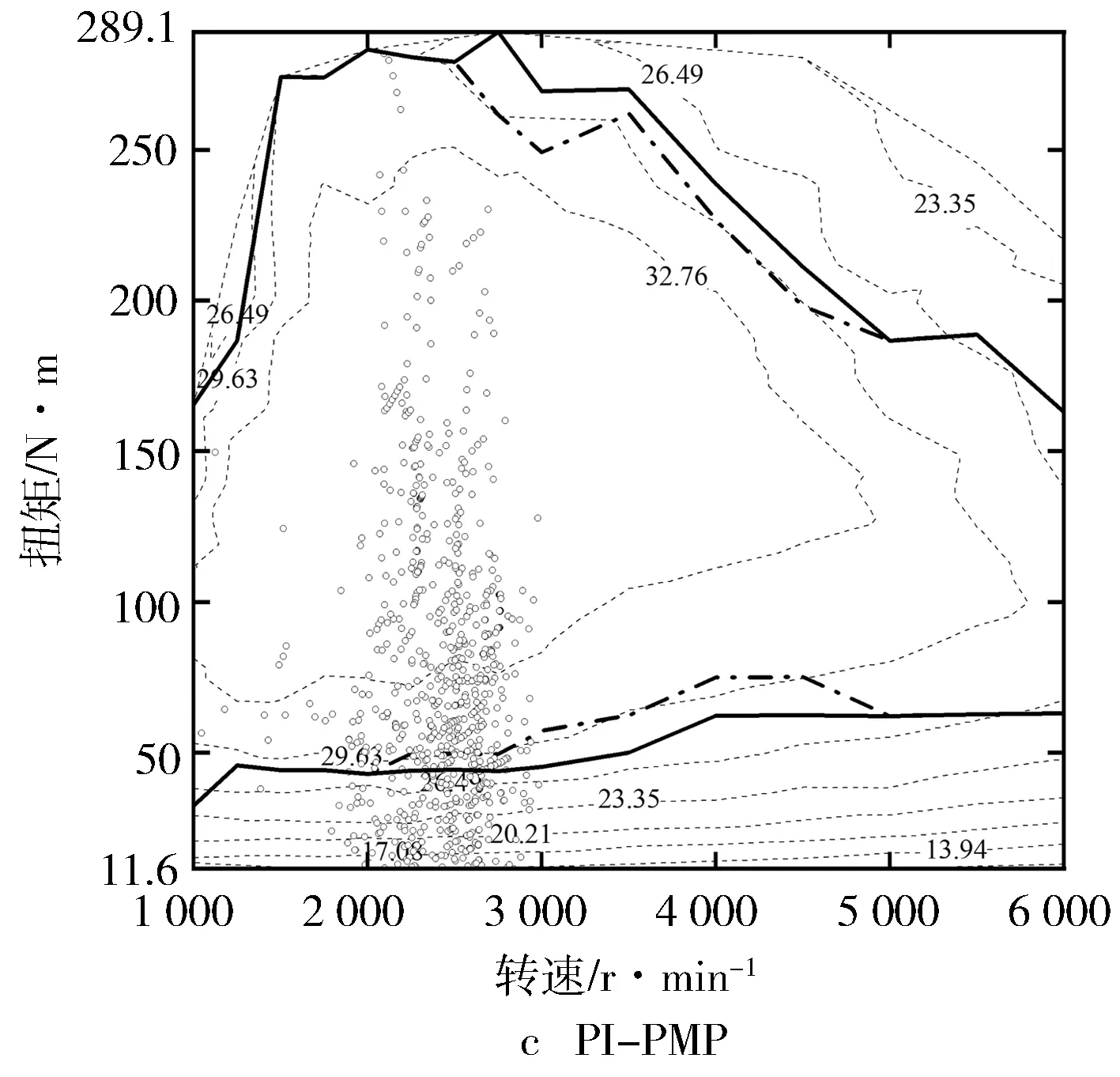

图14 WLTC工况下四种策略的发动机工作点分布
图15和图16分别示出Proposed strategy在WLTC工况下的由功率表示的发动机高效区间和SOC软约束随能量级别的变化曲线。对于高效区间,当能量级别大于等于5时,高效区间将会降低效率要求,这种情况下发动机可输出的功率范围被增大。SOC软约束按照图11曲线与能量级别对应。
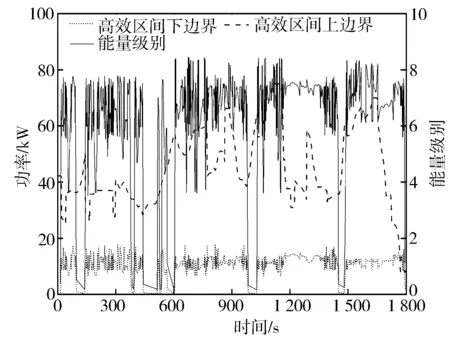
图15 Proposed strategy在WLTC工况下高效区间随能量级别变化曲线
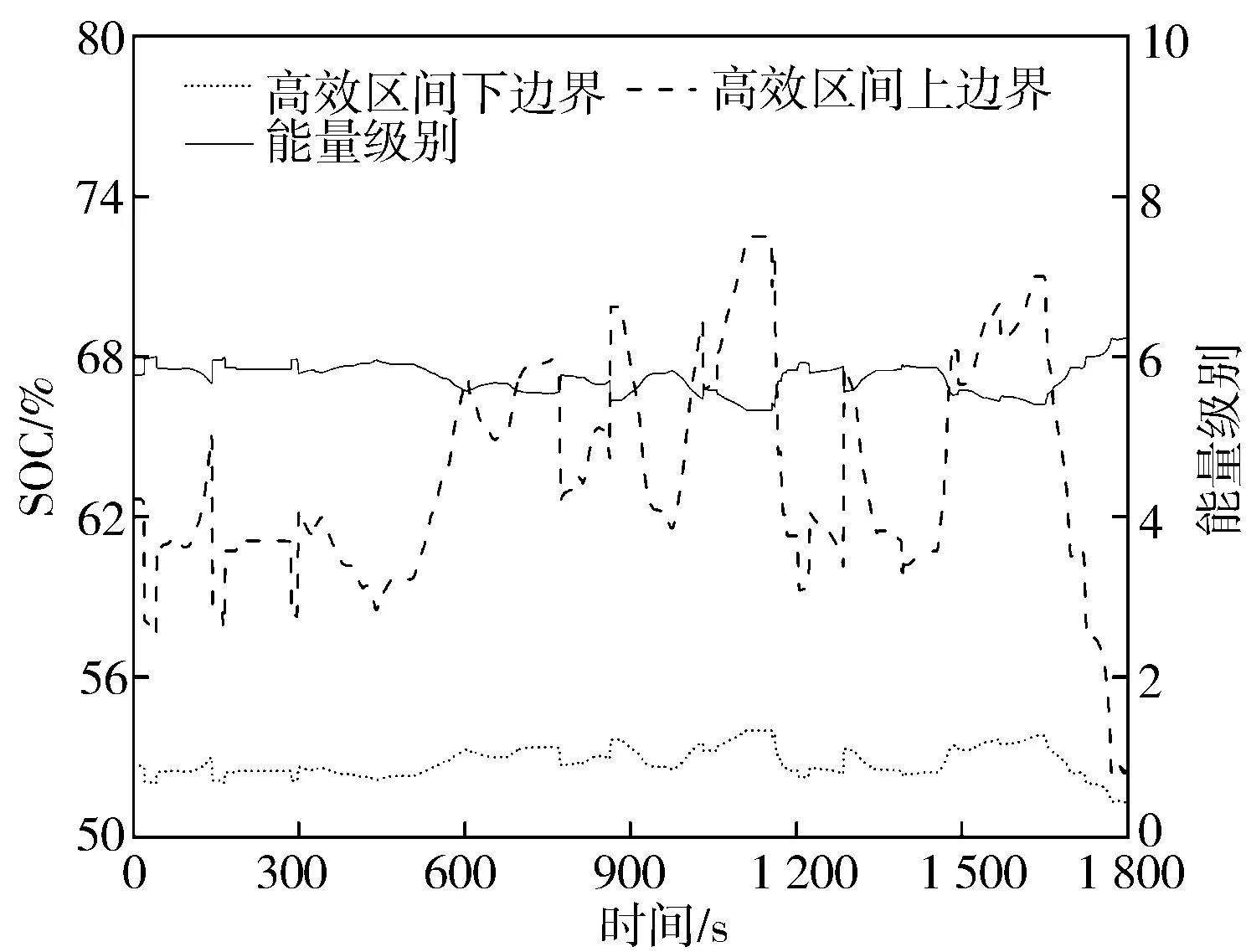
图16 Proposed strategy在WLTC工况下SOC软约束随能量级别变化曲线
4 结束语
介绍了一种新的基于协变量自适应的能量管理控制策略,其目标是改善燃油经济性。通过预测车辆未来道路的需求能量,进一步优化动力分配,同时控制SOC的变化范围。本研究的主要贡献有两点:第一,将发动机高效率工作作为协变量选择的基础和目标,从一种新的角度控制协变量使其自适应地满足全局优化的特点,从而改善经济性。这种方法在实际中易于实现,且具有高度的自适应能力。第二,在深入分析这种方法的特点之后,发现并提出通过预测车辆的未来道路需求能量来进一步优化动力分配和控制SOC的变化范围,使得整个控制策略具有更好的控制效果。仿真结果表明,提出的策略可以实现与全局最优PMP接近的燃油经济性,所设计的需求能量预测环节也表现了其进一步优化动力分配和控制SOC范围的作用。下一步工作是进一步完善以协变量自适应为中心的策略,以实现实际应用为目标,使得整个控制策略更加成熟,并在未来对策略进行实车验证。
