基于时域变结构的自主车队通信拓扑控制
2021-05-11颜坤马家庆
颜坤 马家庆
摘要:伴随着智能控制技术的深入研究和汽车的不断发展,为了解决汽车安全以及能源损耗等问题,本文设计了一种与队列数量不关联的控制器方法来实现自主车队控制。文章首先进行动力学车辆的系统建模,然后介绍时变通信拓扑结构下车辆队列的控制器设计,最后在Matlab中仿真验证,证明了系统的稳定性和控制器方法的可行性,所以该方法适用于工程应用中。
关键词:智能车队;拓扑结构;车辆队列;稳定性
【Abstract】Withthein-depthresearchofintelligentcontroltechnologyandthecontinuousdevelopmentofautomobiles,inordertosolvetheproblemsofautomobilesafetyandenergyloss,thispaperdesignsacontrollermethodthatisnotrelatedtothenumberofqueuestorealizeautonomousfleetcontrol.Thearticlefirstcarriesonthesystemmodelingofthedynamicvehicle,thenintroducesthecontrollerdesignofthevehiclequeueunderthetime-varyingcommunicationtopology,finallyverifiesthesimulationinMatlab,whichprovesthestabilityofthesystemandthefeasibilityofthecontrollermethod.Themethodissuitableforengineeringapplications.
【Keywords】smartfleet;topology;vehiclequeue;stability
作者简介:颜坤(1996-),男,硕士研究生,主要研究方向:控制理论与控制工程、电机控制;马家庆(1981-),男,博士,副教授,硕士生导师,主要研究方向:交流电机控制、智能数据控制。
0引言
随着智能控制技术和汽车的发展,高级驾驶辅助系统(ADAS)也随即产生。ADAS通过结合车辆外部环境和车辆自身情况来提高驾驶的安全性和控制队列行驶。ADAS进行队列控制通过车辆协同合作技术,增加了交通流通量和安全性,让人们乘坐更方便舒服,该技术让车辆间的间距變短,使车辆速度几乎保持一致,这样既实现安全驾驶,又增大了交通流量。
车辆队列系统使用无线通信技术连接成员汽车,通过信息的时效性共享,车辆对环境的更快适应使得队列控制的行车时间减少并且能达到更准确的控制期望。文献[1]中,国内外在车辆队列协同发展领域,欧洲、美国、日本等国家都做了大量的项目研究,集中在队列控制领域得出了许多突出的成果。文献[2]中,美国学者先后开展了许多研究项目,如PATH对车辆队列的纵向跟驰进行了较为深入的研究,其主要目的是提高交通的流通量以及安全性。文献[3]将车队跟驰系统和普通系统进行了具体比较。文献[4]中,日本学者在车辆队列领域的研究上也建树颇丰,其中广受瞩目的研究成果是EnergyITS项目。该项目旨在利用智能交通系统技术来弥补驾驶员的驾驶技术生疏的弊端。文献[5]中,介绍欧洲各个国家学者之间相互学习和合作,车辆队列控制合作研究的主要起点是安全、节能和环保,代表项目SCANIA由瑞典汽车公司主导,希望通过车辆队列控制跟随技术降低卡车燃料的消耗。由前述研究得出的结论方法,本文主要通过建立一种车辆队列控制方法来实现车队自主控制,以达到车队安全跟随并减少能源损耗等目的。
1车队控制系统设计与建模
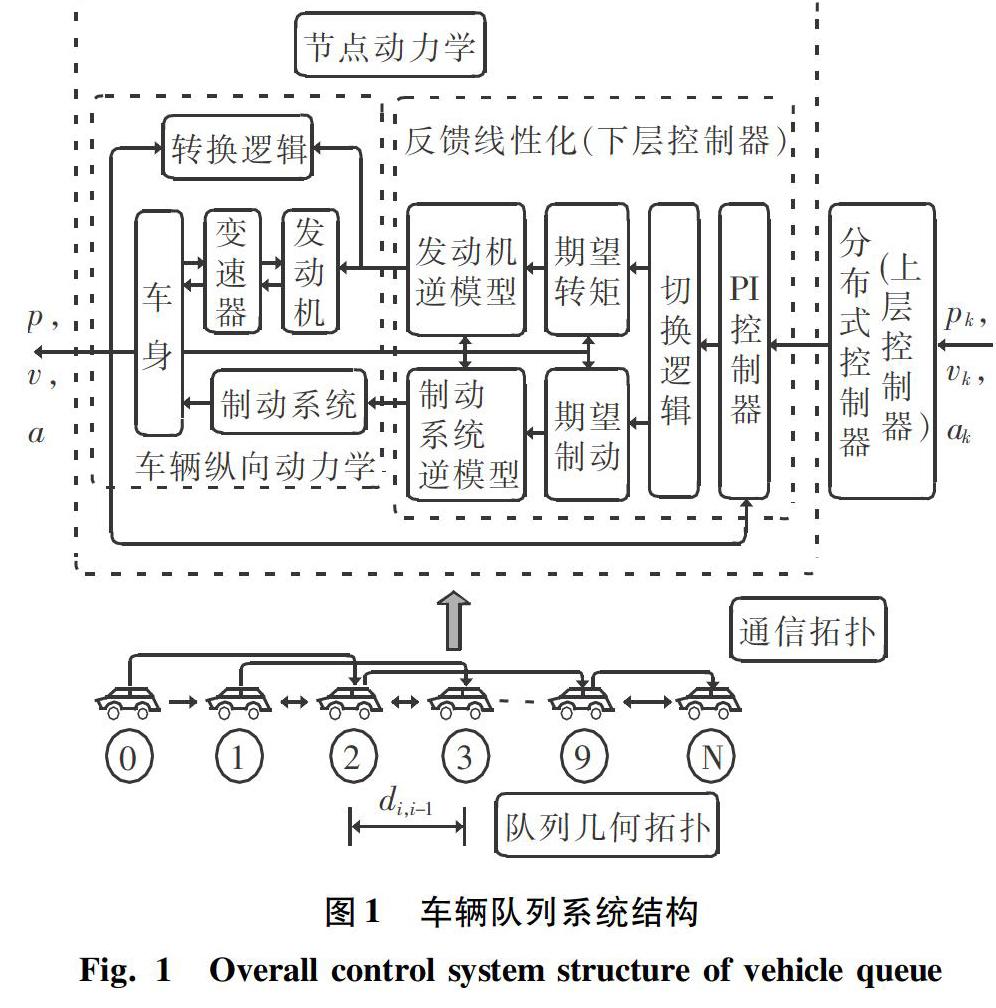
根据文献[6]中设计的包含四元素队列模型,现将车辆队列系统归纳为由4部分组成的高维动力学系统:节点动力学、队列几何拓扑、通信拓扑、分布式控制器。本文的研究重点在于自主车辆队列系统的模型建立后对车队跟驰稳定性和控制器的分析与仿真验证。
车辆节点的动态响应确定队列的动态响应,以避免传统的车辆模型非线性因素给稳定性分析带来不必要的麻烦,本文通过建立线性车辆模型,将其用作队列的节点动力学模型,并将车辆模型建为有向图,通过拉普拉斯阵来反映车队中的信息传递关系,这样便建立了车辆队列线性模型。
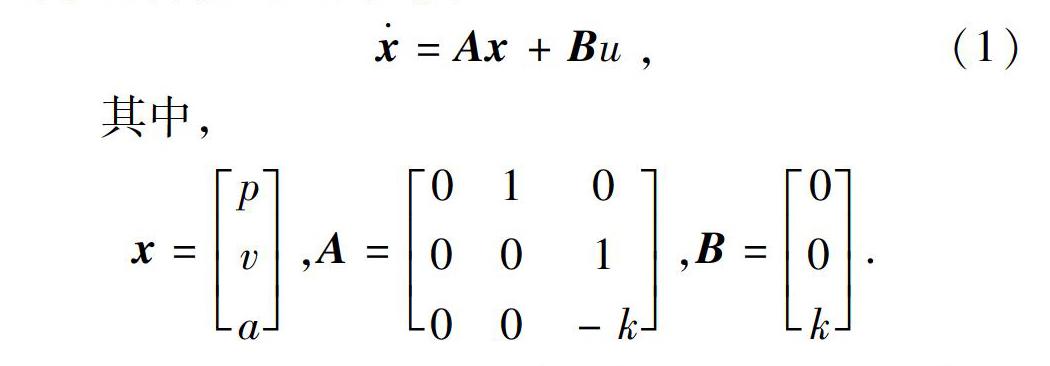
本文仅考虑车辆队列的纵向动力学,并探讨在纵向跟随下将影响车队内稳定性的非线性因素。通过总结,无论在加速或者减速的行车情况下,期望需要的加速度与车辆队列实际的加速度响应可以用一阶惯性延迟模型来叙述清楚。选取输入量用期望的加速度,状态量使用车辆的位置,所以车辆队列模型的状态方程可以列出为:
通信拓扑在车辆队列系统将独立的车辆节点彼此连接形成整体,单个节点能保留其动态特性,也能通过耦合作用将影响整个队列的行为。不同的通信拓扑在队列总体性能中具有不同的效果,一些经常使用的通信拓扑结构,如:BPF、TBPF、PF等。车辆队列模型的通信拓扑结构通常建模成有向图的形式名为图论模型,其结构特点则通过拉普拉斯阵描述,分布式控制器的设计使用静态线性状态反馈的形式。
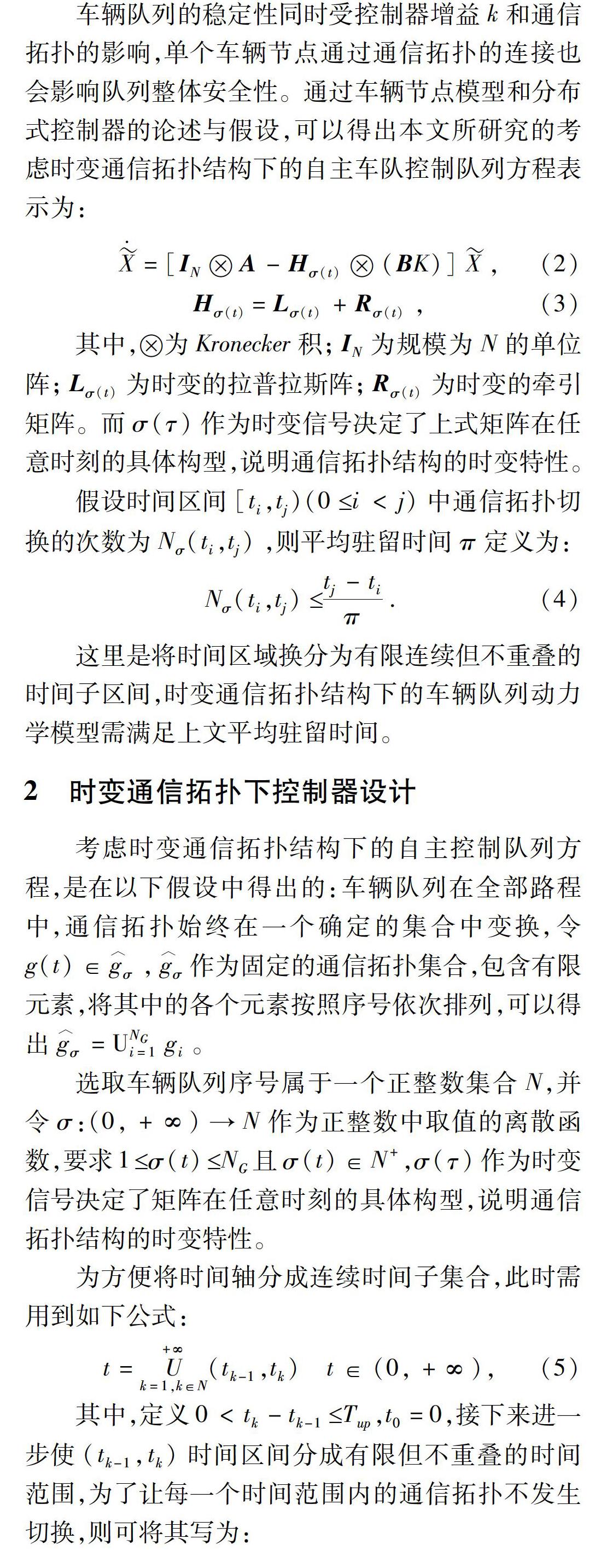
车辆队列的稳定性同时受控制器增益k和通信拓扑的影响,单个车辆节点通过通信拓扑的连接也会影响队列整体安全性。通过车辆节点模型和分布式控制器的论述与假设,可以得出本文所研究的考虑时变通信拓扑结构下的自主车队控制队列方程表示为:
因为通信拓扑图结合中的每一个元素都包含有向生成树,而线性矩阵不等式始终存在对称正定解PH>0。验证得出函数在任意时间里都是衰减的,结合平均驻留时间π的定义也可以清晰地得出跟驰误差是按照指数衰减到零,所以系统内稳定。
考虑时变通信车队稳定性时,必须约束时变通信的平均驻留时间不能过小,太多通信切换将影响函数衰减,降低系统稳定性。其实对于一般时变的线性系统,无论考虑多么周全,即使系统状态稳定,还是可能产生系统切换信号,所以必须保证通信拓扑下的子系统都是稳定的,并要求平均驻留时间足够长。
3车辆模型稳定性仿真分析
本文中仿真通过使用线性车辆模型来验证上文推导的理论的正确性,用PF通信拓扑结构为例进行数值仿真,验证稳定性。车辆队列基本参数见表1。
仿真涉及到的通信拓扑见表2。表2中包含了PF、BPF、TPSF的通信拓扑,表格第二列标明了通信拓扑是否具有复特征值,第三列标出了特征值的最小正实部,第四列则给出各个通信拓扑阵的不同特征值的个数。
同样的方法在其他通信拓扑下的镇定控制器求解上也适用,所以求解出来TPSF、BPF通信拓扑下的控制器增益为[0.271.891.96]和[0.661.861.13],再结合上式(10)数值进行仿真。通过仿真配置进行数值仿真,零初始条件下的仿真结果如图2所示。
通过分析以上仿真结果可以得出,本文设计的车辆队列内稳定性和镇定控制器求解的方法都是可行的,即使含有复特征值也是一样。上文说明了提出的控制器求解方法计算量是与队列规模无关的,只需要求解的线性矩阵不等式维数是与车辆模型相同便可以得到控制器增益。所以分别仿真PF、TPSF等通信拓扑,仿真的结果也与上文一致,都符合内稳定约束。限于篇幅,这里将不再赘述。
下面给出车辆队列在时变通信拓扑结构下的仿真分析,旨在通过数值验证上文时变通信拓扑结构的研究方法,仿真的模型、方法、分析都与上文类似。在此通过2种通信拓扑结构切换来进行讨论。
场景:通信拓扑在PF与LPF之间切换。研究中选取控制器的参数见表3。表3中,还列出了与平均驻留时间相关的参数,通过计算得出2个场景的平均驻留时间为不小于1.08s和6.37s。
时变下车队跟驰误差的仿真结果则如图3所示。从图3中可以清晰看出在保证平均驻留时间时,误差能随时间变化降至零,所以时变通信拓扑下系统能保证稳定性,而且分析可以得出定理中约定的最小平均驻留时间是很保守的,证明模型的稳定性能够得到有效保证。
4结束语
本文在时变通信拓扑结构的自主车队控制下考虑车辆队列的内稳定性影响,搭建了基于四元素架构的高维车辆队列状态方程,提出约束系统内稳定性的条件,同时证明了要保证内稳定性需要时变通信拓扑条件约束,设计出了一种控制器求解与车辆队列数量无关的设计方案,并通过理论和仿真验证分析证明了文中提出结论的可行性,同时该方法也能在工程应用中适用。
参考文献
[1]BERGENHEMC,HUANGQ,BENMIMOUNA,etal.Challengesofplatooningonpublicmotorways[C]//17thWorldCongressonIntelligentTransportSystems.Busan,SouthKorea:Elsevier,2010:1-12.
[2]SHLADOVERSE,DESOERCA,HEDRICKJK,etal.AutomatedvehiclecontroldevelopmentsinthePATHprogram[J].IEEETransactionsonVehicularTechnology,1991,40(1):114-130.
[3]HEDRICKJK,UCHANSKIM,XUQ.EnhancedAHSsafetythroughtheintegrationofvehiclecontrolandcommunication[R].UCBerkeley:InstituteofTransportationStudies,2001.
[4]TSUGAWAS,KATOS,AOKIK.Anautomatedtruckplatoonforenergysaving[C]//2011IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems(IROS).SanFrancisco,CA,USA:IEEE,2011:4109-4114.
[5]AlamA.Fuel-efficientdistributedcontrolforheavydutyvehicleplatooning[D].Stockholm,Sweden:KTHRoyalInstituteofTechnology,2011.
[6]鄭洋.基于四元素构架的车辆队列动力学建模与分布式控制[D].北京:清华大学,2015.
[7]李升波.车辆多目标协调式自适应巡航控制[D].北京:清华大学,2009.
[8]张贤达.矩阵分析与应用[M].2版.北京:清华大学出版社,2013.
[9]胡寿松.自动控制原理[M].7版.北京:科学出版社,2021.
[10]王金城.现代控制理论[M].北京:化学工业出版社,2007.
[11]黄家英.自动控制原理[M].2版.北京:高等教育出版社,2010.
[12]刘康志,姚郁.线性鲁棒控制[M].北京:科学出版社,2013.
[13]秦晓辉.多型通信拓扑下车辆队列分布式控制中的稳定性问题[D].北京:清华大学,2016.
[14]李晓东,刘畅,刘鹏.基于背景建模的车辆跟踪方法[J].智能计算机与应用,2020,10(1):76-79.
[15]王丽娟.基于多分类的车辆轨迹地图匹配算法的研究[J].智能计算机应用,2017,7(6):35-38.
