一种基于双模糊控制理论的PID控制的温湿度系统设计及应用*
2021-05-11张矿伟张少杰曾德斌李玉慧
张矿伟,张少杰,曾德斌,李玉慧
(1. 周口职业技术学院信息工程学院,河南周口,466000; 2. 玉溪师范学院物理与电子工程学院,云南玉溪,653100; 3. 昆明理工大学信息工程与自动化学院,昆明市,650500)
通讯作者:李玉慧,女,1965年生,云南昆明人,硕士博士,教授;研究方向为人工智能。E-mail: 287386336@qq.com
0 引言
在我国北方猪舍的生长环境中猪舍的温度以及湿度对生长育肥猪的整个生长过程、大型猪场的生产效率以及伴随的经济效益都是极其重要的[1]。生长育肥猪对外界环境适应能力差主要由于它的脂肪厚以及皮肤薄所导致的,猪舍温度过高会导致其食量下降、甚至是抗病性降低;过低的猪舍温度环境则会导致其要消耗一定量的脂肪去维持体温平衡[2],这对大型猪场所有主的经济收入是不利的;其次,猪舍中细菌滋生、生长育肥猪的疾病诱发以及整个猪舍的控制系统的电子器件侵蚀破坏等基本都是由猪舍中相对较高的空气湿度所导致的[3-4];而猪舍环境中的相对空气湿度也不能太低,太低则会导致生长育肥猪的黏膜破坏以及皮肤干裂等问题出现;在生长育肥猪的猪舍环境中既要保持适宜的温度以及空气相对湿度,同时还要保障其通风换气量这在一定程度上存在矛盾性,但是这又对提高生产效益尤为重要[5]。
1 总体温湿度控制方案设计
1.1 模糊控制原理
综合猪舍内温湿度的控制要求,优先引入模糊控制来解决温湿度控制中实时性差的问题。温湿度控制过程中,分别将温度变化误差与温度变化误差率和湿度变化误差与湿度变化误差率对其进行模糊处理,将处理的参数分别用于温度控制单元和湿度控制单元[6-7],按照相应的控制方案与知识库进一步进行分析处理,将处理的结果送入控制器进行模糊分析处理,取得被控模块所要求的控制精度[8],原理如图1所示。

图1 模糊控制器原理Fig. 1 Principle of fuzzy controller
1.2 猪舍温湿度模型建立
猪舍内环境温度及相对湿度的控制,主要使用风机及湿帘进行调节,风机的作用是调节猪舍内环境温度,湿帘的作用是调节猪舍内环境湿度[9-10]。对于极端天气,将使用温湿度综合调控系统来保障猪舍内温湿度达标。通过计算分析得到猪舍内温度控制系统属于二阶加纯滞后系统,猪舍温度控制系统的传递函数
(1)
式中:K1,K2——放大系数;
T1,T2——惯性时间常数;
τ1,τ2——控制器纯滞后时间常数。
猪舍湿度控制系统的传递函数同样也满足式(1)。猪舍温湿度控制系统首先利用模糊选择模块判断温湿度值,分别计算温度变化误差值和湿度变化误差率值用做于控制器的设定值,温度控制单元和湿度控制单元结合猪舍内环境温湿度的真实变化情况进行不断调整,已到达很好的控制效果,使其猪舍内温湿度适宜生猪育肥。猪舍温湿度控制系统模型如图2所示。
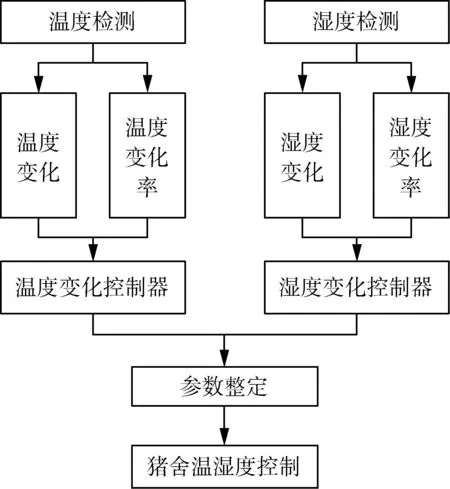
图2 温湿度系统模型Fig. 2 Temperature and humidity system model
1.3 双模糊控制理论的PID猪舍温湿度控制
猪舍双模糊PID温湿度控制系统原理图如图3所示。

图3 猪舍温湿度双模糊控制系统Fig. 3 Double fuzzy control system of temperature and humidity in pig house
本文设计了一种双模糊控制理论的PID控制器,以猪舍的温度以及空气的相对湿度的设定值与检测值的温度变化误差e主要作为温度控制模块的输入值,湿度变化误差率ec主要作为湿度控制模块的输入值[11]。两个控制模块进行模糊运算后,将两个控制模块的输出值综合起来,用于保证输入给PID控制器的三个参数增量Δkp、Δki以及Δkd能够更为准确有效。
图3中,Fuzzy1为温度模糊控制器,Fuzzy2为湿度模糊控制器,分别根据温度变化误差e与温度变化误差率ec和湿度变化误差e以及湿度变化误差率ec进行模糊化,接着按照模糊化的结果再进行模糊推理,最后使用反模糊化方法整定得到适合PID控制器的三个参数Δkp、Δki以及Δkp,进一步利用根据预先规定的模糊规则,从而实现猪舍温湿度的快速以及精确的调整,PID控制器过程参数
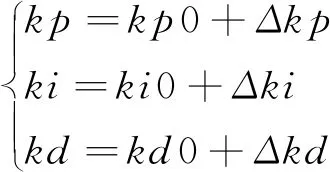
(2)
式中:kp0、ki0、kd0——系统预先赋值的初始值;
Δkp、Δki、Δkd——模糊自适应控制器的输出值。
1.4 系统硬件设计方案
基于双模糊控制理论的PID控制的温湿度系统整体硬件设计如图4所示。主要包括:上位监控模块、下位控制模块、数据采集模块和执行模块四大模块。其中,上位机监控模块主要用于温湿度参数设定及数据存储与分析;下位控制模块选用的是STM32F103微控制器,这款微控制器是以ARM Cortex-M3为内核的32位嵌入式系统[12],主要用于控制变频器、电磁阀等执行元件;数据采集模块主要使用DTH11温湿度传感器,对猪舍内温湿度进行采集;执行模块主要包括温度控制的执行元件和湿度控制的执行元件,分别有风机、湿帘、加热器、制冷片等。

图4 系统整体硬件设计框图Fig. 4 Block diagram of the overall hardware design of the system
本系统通过DTH11温湿度数据采集模块监测风机运行状态及猪舍内环境温湿度值,将温湿度信息传输到STM32F103微控制模块;控制模块根据接收到的温湿度参数值,使用扩展总线和RS-485串口与上位机进行数据传输,将温湿度检测值与设定值进行比较后,实施对执行模块的控制,控制变频器来调节风机转速,控制电磁阀开度来调节湿帘,使其能够满足对温湿度得控制要求;最后,再通过上位监控系统完成数据的存储与分析。
1.5 系统软件设计方案
本文的软件系统设计主要有上位操作站程序设计和下位控制站程序设计两部分构成。双模糊自适应PID控制流程图及系统的主程序软件流程图分别如图5、图6所示。
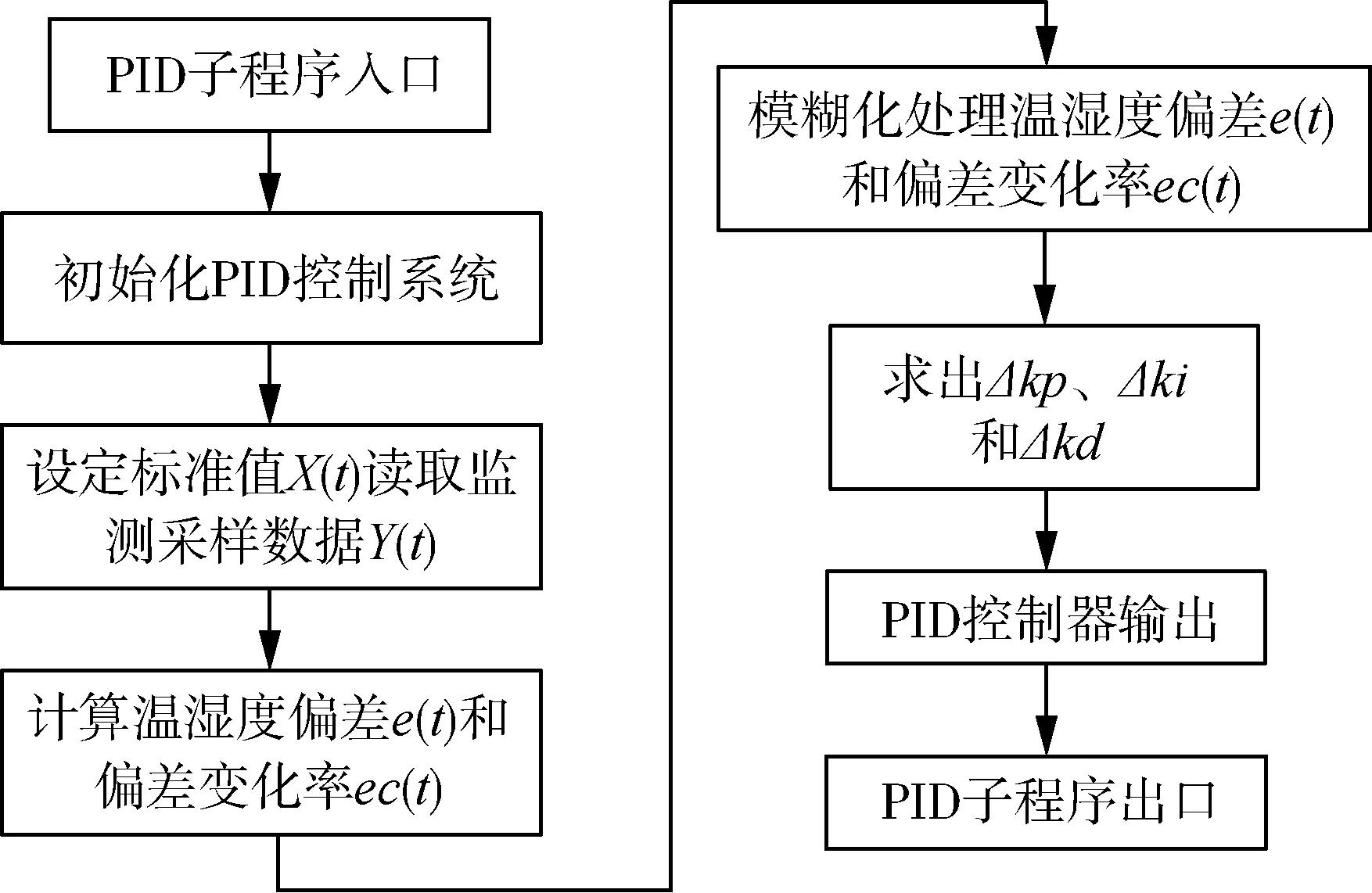
图5 双模糊自适应PID控制流程图Fig. 5 Flow chart of dual fuzzy adaptive PID control
系统启动后,首先对系统进行初始化处理,接着利用DTH11温湿度采集模块,采集猪舍内的信息参数,主要包括:温湿度,风机参数等数据,然后,将采集的数据传输给上位机操作站,上位操作站将检测值和设定值进行对比分析,判断检测值是否达到温湿度设定值,达到则循环检测,反之则利用微控制器STM32控制驱动电路调节温湿度设备,从而达到温湿度的控制要求。

图6 系统主程序流程图Fig. 6 System main program flow chart
2 双模糊控制器的设计
利用双模糊控制器去整定PID控制器的三个参数Δkp、Δki以及Δkd具有较大的优势[13]。通过模糊选择模块对Fuzzy1以及Fuzzy2进行选择,当检测到的变量是温度时,采用温度模糊控制器对其进行控制,能够有效实现对温度控制系统的实时响应;当采集到的输入变量是湿度时,则采用湿度模糊控制器对空气的相对湿度进行控制。通过对猪舍温湿度控制系统的综合分析,以温度控制为例,利用二维的模糊控制器作为双模糊控制理论的PID控制系统的控制器。
1) 确定系统的输入输出变量。本研究选用猪舍的温度以及空气的相对湿度的设定值与检测值的温度变化误差e主要作为温度模糊控制模块的输入值,湿度变化误差率ec主要作为湿度模糊控制模块的输入值[13],模糊控制器的输出是以PID控制器所对应的参数变化量Δkp、Δki、Δkd作为输出。
2) 定义模糊子集。根据系统的模糊控制模块处理后的三个参数Δkp、Δki、Δkd[14]分别作为PID控制器的输入值。分别根据温湿度的变化情况预定义了对应的模糊子集,分别为{NB(负大),NM(负中),NS(负小),Z0 (零),PS(正小),PM(正中),PB(正大)},其次定义他们的模糊论域为{-3,-2,-1,0,1,2,3}。
3) 确定隶属函数。本文综合分析了猪舍环境中的温度变化的特性,结合几种常用的隶属度函数特点,以三角形隶属度函数用于本系统的隶属度函数最为适合[15]。三角形隶属度函数的具体形式如式(3)所示。
(3)
4) 建立模糊控制规则表。模糊控制器的输入值对应的温度变化误差e及温度变化率ec能够建立相应的隶属度函数[16],按照控制要求建立的隶属度函数如图7所示,模糊控制器的输出所对应的PID的三个参数值Δkp、Δki、Δkp的模糊控制规则表如表1所示。
5) 模糊推理及解模糊。文中采用Mamdani推理方法对猪舍内环境的温度变化及相对湿度变化分别按推理方法进行模糊推理,而在工业控制领域则主要采用加权平均法进行解模糊。输出值由式(4)决定。
(4)
根据预先定义的模糊控制规则可以将模糊控制规则表改写为以下的“IF THEN”形式,例如表1可以改写
1. If (eis NB) and (ecis NB) then (kpis PB)
2. If (eis NB) and (ecis NM) then (kpis PB)
3. If (eis NB) and (ecis NS) then (kpis PM)
4. If (eis NB) and (ecis Z0) then (kpis PM)
5. If (eis NB) and (ecis PS) then (kpis PS)
6. If (eis NB) and (ecis PM) then (kpis Z0))
7. If (eis NB) and (ecis PB) then (kpis Z0)
8. If (eis NM) and (ecis NB) then (kpis PB)
9. If (eis NM) and (ecis NM) then (kpis PB)
………………
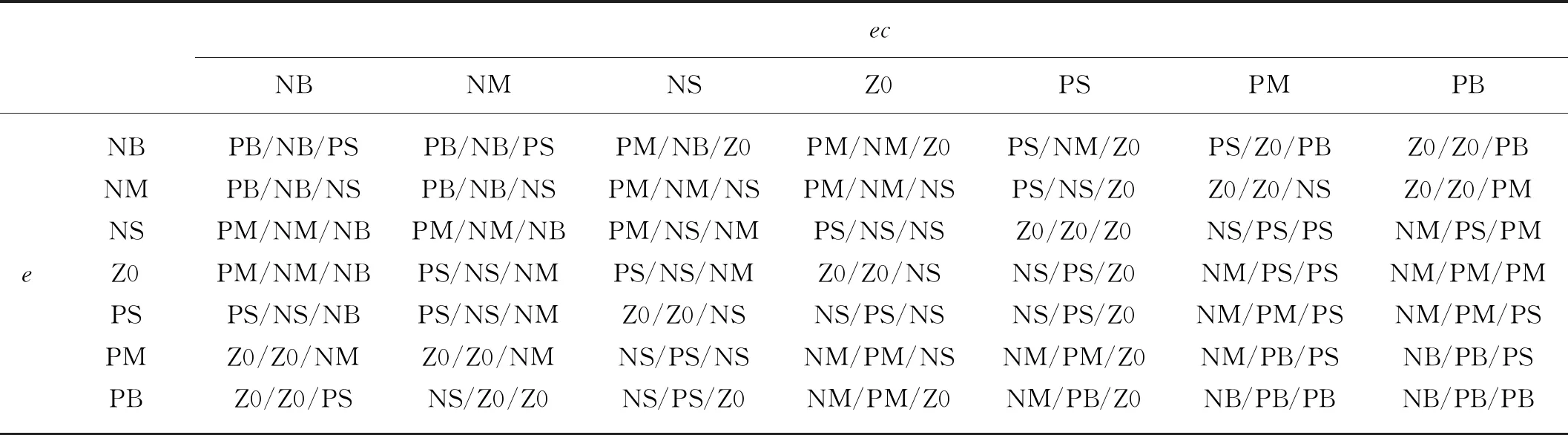
表1 模糊PID控制器的Δkp、Δki、Δkd的控制规则Tab. 1 Control rules of Δkp、Δki and Δkd of fuzzy PID controller
3 仿真测试
为了验证双模糊控制理论的PID控制猪舍温湿度控制系统的有效性,并且借助MATLAB2016a软件首先完成了对模糊PID控制器得仿真对比处理,然后完成了文中所用的双模糊自整定PID控制器的仿真对比处理,模糊PID控制以及双模糊控制理论的PID控制两个系统的初始PID控制参数kp、ki以及kd分别设为3.9、0.01以及3.0。结合国家颁布的《规模猪场环境参数以及环境管理》文件要求中的猪舍内最适宜生长育肥猪的适宜环境温度为15 ℃~23 ℃以及猪舍中合适的空气相对湿度为65%~75%,文中在2018年11月中下旬的某天0:00至第二天0:00的温湿度变化进行实验,主要是针对某大型养猪场开展了双模糊控制理论的温湿度控制系统以及模糊PID控制对猪舍环境温湿度的对比试验,试验结果分别如图7、图8所示。
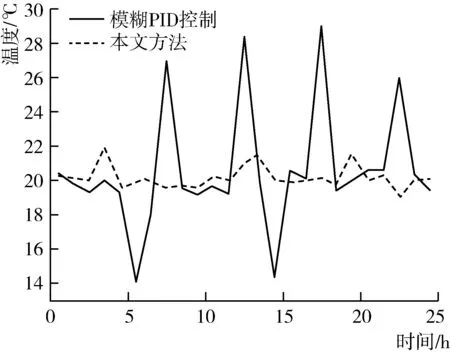
图7 温度仿真对比曲线Fig. 7 Temperature comparison curve between the control system and the original control system
由图7分析可知,文中所用的双模糊控制理论的PID控制对猪舍环境的温度能有很好的调节作用,将猪舍的温度很好的控制在19 ℃~22 ℃的范围内,并且猪舍环境中的温度波动幅度不大,最大的波动温差是2 ℃;然而相比之下模糊PID控制对整个猪舍环境的温度控制波动幅度太大,最低温度是14 ℃,最高温度是接近29 ℃,这对生长育肥猪的成长是不利的,不符合国家颁发的《规模猪场环境参数以及环境管理》中的生长育肥猪温度标准。

图8 湿度仿真对比曲线Fig. 8 Humidity comparison curve between the control system and the original control system
由图8可以分析得知,文中采用的双模糊控制理论的PID控制能够很好的满足猪舍环境中湿度值,将相对湿度很好的控制在65%~75%范围内,最低的空气相对湿度为65%,最大的空气相对湿度大约为74%,并且波动幅度不大;然而模糊PID控制对整个猪舍环境的湿度控制则是波动幅度太大,最低的空气相对湿度大约为59%,最大的空气相对湿度大约为85%,最大湿度偏差为15%。
4 试验测试
为了进一步验证双模糊自适应PID控制猪舍温湿度控制系统的有效性,对部分猪舍环境数据进行采集,记录留存2018年12月中旬,某两天48小时的温湿度变化数据。记录数据两天的外界环境温度大约一致均为:最低温度-5 ℃,最高温度7 ℃;外界环境相对湿度较接近均为:最低相对湿度25%,最高相对湿度42%。通过温湿度传感器采集到的猪舍内外温度和相对湿度数据轨迹曲线如图9和图10所示。

图9 内外部温度记录曲线Fig. 9 Recording curve of internal and external temperature
通过图9和图10两天的温湿度实验记录曲线可以得出,外界的温度变化幅度明显,最大温差有12 ℃,内部温度很好的控制在20 ℃上下,最低温度为19.5 ℃,最高温度为21.5 ℃,最大偏差为2 ℃。内部温度变化幅度较小,与外部温度变化关系不大,将温度很好的控制在19 ℃~22 ℃。外部环境的相对湿度最低为25%,最高为42%,相对湿度偏离适宜值较大,并且变化幅度也较大。内部相对湿度很好的控制在70%上下,最低相对湿度为65%,最大的空气相对湿度大约为74%,最大偏差为5%。内部相对湿度变化幅度较小,将相对湿度很好的控制在65%~75%范围内。温湿度上下波动幅度均不大,温湿度均能很好的达到控制要求,并且相比原温湿度控制系统的控制精度有很好的提高。

图10 内外部相对湿度记录曲线Fig. 10 Record curve of internal and external relative humidity
仿真验证和实际测试数据保持一致,验证了仿真测试的正确性以及双模糊自适应PID控制的优越性。本研究提出的猪舍环境调控模型可以使猪舍温度、相对湿度保持在适宜的范围内,也可以很好的解决猪舍通风控制与保温控制之间的矛盾,具有极大的研究意义。
5 结论
1) 文中针对生长育肥猪猪舍环境中的温湿度具有时变性以及非线性的特点,设计了一种双模糊控制理论的PID控制系统与模糊PID控制对其环境中的温湿度进行控制效果的对比,并对部分猪舍环境数据进行采集,验证仿真实验。
2) 试验结果表明,双模糊自适应PID控制把猪舍的温度控制在19 ℃~22 ℃之间,最低温度为19.5 ℃,最高温度为21.5 ℃,最大偏差为2 ℃;把猪舍环境的湿度控制在65%~75%的范围内,最低相对湿度为65%,最大的空气相对湿度大约为74%,最大偏差为5%。
3) 实际测试数据和仿真数据一致,证明了双模糊控制理论的PID控制器不论是在对猪舍环境的温度控制还是湿度控制效果相比之前的温度、湿度控制方法都有很强的优势,该温湿度控制系统应用于猪舍环境温湿度控制中有较高的价值。