基于DBN-PID模型的舰船运动姿态短期预测及仿真
2021-05-09迟鑫鹏郑旺辉
迟鑫鹏 郑旺辉


摘 要:舰船在海浪中航行受到海浪、海风等环境因素干扰,不可避免地产生摇摆,给舰船的海上航行造成很大的安全隐患。舰船航行过程中,运动姿态会受到耦合作用、不定周期等诸多因素的干扰,因此很难精确地预测舰船的短期运动姿态。文章提出一种新的预测方法,将机器学习DBN网络与PID网络相互结合,建立DBN-PID模型对舰船的姿态变化进行短期预测。模型有效地解决了舰船运动姿态预测时间短、误差大的问题,具有良好的工程应用价值。
关键词:舰船运动;非线性;短期预测
中图分类号:TP183 文献标识码:A 文章编号:2096-4706(2021)20-0071-07
Short-term Prediction and Simulation of Ship Motion Attitude Based on DBN-PID Model
CHI Xinpeng, ZHENG Wanghui
(Beijing Institute of Machinery Equipmenth, Beijing 100854, China)
Abstract: Ship navigation in the waves is disturbed by the waves, sea breeze and other environmental factors, inevitably swaying, causing great security risks to the ship navigation. In the process of ship navigation, the motion attitude will be disturbed by many factors, such as coupling effect, indefinite period and so on. Therefore, it is difficult to accurately predict the short-term motion attitude of a ship. In this paper, a new prediction method is proposed, which combines machine learning DBN network with PID network to establish DBN-PID model for short-term prediction of ship attitude changes. The model effectively solve the problems of short time and large error of ship motion attitude prediction, and has good engineering application value.
Keywords: ship motion; nonlinearityl; short term forecast
0 引 言
目前对舰船姿态的极短期的预测方法的研究中,主要是从频域和时域进行探究。归纳起来主要有:统计预报方法、卷积方法、卡尔曼滤波法、周期图法、艏前波法、谱估计方法、投影寻踪方法等。这些上述方法应用起来都有一定的局限性,如采用滤波方法,需要提供系统自身的状态方程,由于舰艇的运动形式十分复杂,想要获得其相对精确的状态方程十分困难。时间序列分析法则计算量较大。而且对于舰船的运动的姿态来说,单纯地采用一个线性的数学模型是无法准确地逼近所要预测的舰船的运动姿态,此外艏前波法是要基于舰艏波的信息参数,这些在实际计算中是难以实现的[1]。本文建立的DBN-PID舰船运动姿态短期预测模型可以降低计算量,延长预测时间达到更加良好的预测效果。
1 DBN-PID模型建模原理
1.1 DBN深度置信神經网络
1.1.1 DBN技术简述
深度信念网络(machine learning deep belief, DBN)是Hinton于2006年提出的基于能量的无须监督的学习模型,该模型的结构如图1所示。
由DBN的结构图可知,DBN由多个受限波尔兹曼机(restricted Boltzmann machine, RBM)堆叠而成,传统的DBN算法的训练过程是首先训练第一个RBM,不断迭代以调整该权重矩阵,当该权重矩阵变化小于额定阈值时,说明该RBM训练完毕,再将第一个RBM的输出当作第二个RBM的输入,训练第二个RBM,这样依次训练下去,直到所有的都训练完为止。
1.1.2 受限波尔兹曼机
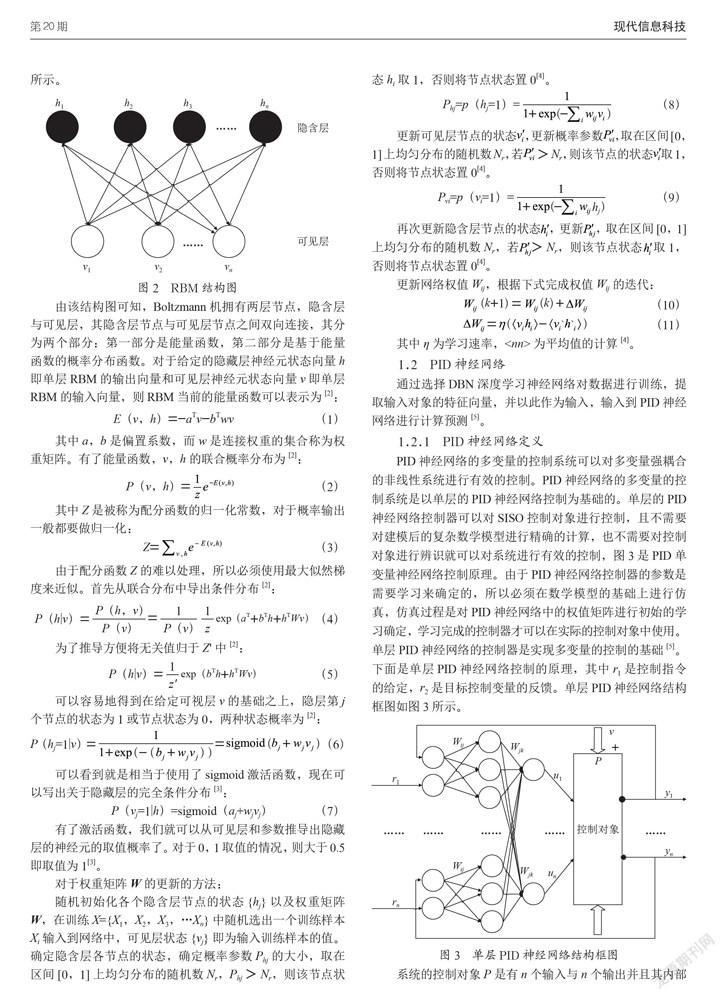
2006年,Hinton首次定义了受限波尔兹曼机。RBM是一种基于概率计算和神经网络的数学模型。该模型如图2所示。
由该结构图可知,Boltzmann机拥有两层节点,隐含层与可见层,其隐含层节点与可见层节点之间双向连接,其分为两个部分:第一部分是能量函数,第二部分是基于能量函数的概率分布函数。对于给定的隐藏层神经元状态向量h即单层RBM的输出向量和可见层神经元状态向量v即单层RBM的输入向量,则RBM当前的能量函数可以表示为[2]:
1.2 PID神经网络
通过选择DBN深度学习神经网络对数据进行训练,提取输入对象的特征向量,并以此作为输入,输入到PID神经网络进行计算预测[5]。
1.2.1 PID神经网络定义
PID神经网络的多变量的控制系统可以对多变量强耦合的非线性系统进行有效的控制。PID神经网络的多变量的控制系统是以单层的PID神经网络控制为基础的。单层的PID神经网络控制器可以对SISO控制对象进行控制,且不需要对建模后的复杂数学模型进行精确的计算,也不需要对控制对象进行辨识就可以对系统进行有效的控制,图3是PID单变量神经网络控制原理。由于PID神经网络控制器的参数是需要学习来确定的,所以必须在数学模型的基础上进行仿真,仿真过程是对PID神经网络中的权值矩阵进行初始的学习确定,学习完成的控制器才可以在实际的控制对象中使用。单层PID神经网络的控制器是实现多变量的控制的基础[5]。下面是单层PID神经网络控制的原理,其中r1是控制指令的给定,r2是目标控制变量的反馈。单层PID神经网络结构框图如图3所示。
1.2.2 PID神经网络权值修正
PID神经网络可以进行权值修正。其在控制的过程中通过输入数据和输出数据的误差不断地调节自身的参数,使系统的目标值和控制量越发的接近。误差计算公式如下[7]:
1.2.3 PID神经网络增加动量项
PID神经元网络的权值应用梯度算法进行学习。网络的权值的修正速度较慢,此外易产生局部最优的困扰。可以通过增加一定的动量项模块的方法来提高神经源网络学习的效率。增加的动量项模块的权值学习公式为:
1.3 DBN-PID神经网络
以上述的DBN神经网络模型和PID神经网络模型为基础建立DBN-PID神经网络模型。将DBN神经网络的输出作为PID神经网络的输入进而建立DBN-PID神经网络模型。
2 DBN-PID模型验证与分析
2.1 DBN-PID模型建模仿真步骤
建模仿真步骤如下:
(1)本文采用的数据来源于惯性仪器采集的数据,将惯性器件搭载到平台之上,对数据进行实测,采样的频率为40赫兹,采集了1 015秒共40 600组数据。以40 000组采集的数据为训练的样本,以此对建立的模型展开训练。
(2)将40 000组数据集作为样本输入到DBN卷积神经网络中进行训练学习,采集DBN神经网络的输出即提取出来的特征向量作为DBN神经网络的输出。
(3)将DBN神经网络的输出的特征向量作为PID神经网络的输入,进行训练。通过自身的神经网络结构进行参数自调整。
(4)用训练好的DBN-PID模型对接下来15秒的舰船运动姿态短期预测。
(5)检验模型是否合理。
(6)仿真计算500秒、700 秒、1 000秒的姿态的预测结果。利用计算海明距离、均方根误差、相似离度对模型进行精度检验。
建模仿真过程流程图如图4所示。
2.2 误差分析方法
从统计学角度利用参数的大小对所建预报模型的性能进行评价。
本文通过计算海明距离与平均绝对误差来判别数据之间的误差大小,以此比较预报模型性能的优劣[8]。
2.2.1 海明距离
式中,i、j为两个样本,x为因子数值,m为因子数量,k为因子序号(各符号意义不同)。Hij的值域为[0,N),N为不一定的数,当其为0时两样本最相似,N越大相似程度越低。
2.2.2 平均絕对误差
平均绝对误差是将预测值与真实值相减所得的对应的数组,将每个元素分别与其数组的平均值相减之后得到新的数组,数组内各个元素的的平方和与观测次数n比值的平方根[10],如式(23)。在实际观测的情况下所观测的次数n一定是个有限值,所以要采用最适当的一组值充当观测值。标准误差是检测数组中极大值极小值对整个数组影响权重的一个检验标准[11]。标准差是衡量自身数组波动变化的参数,而平均绝对误差是衡量预测值与真实值之间的离散程度,它们的研究对象和研究目的不同[12],但是计算过程类似均方根误差算的是观测值与其真值,或者观测值与其模拟值之间的偏差,而不是观测值与其平均值之间的偏差。
2.2.3 相似离度
相似离度,即相似性的差异程度,从形与值两方面综合考虑相似性,是一个比较全面的相似标准[14]。综合评定两组数据是否相似的一种度量,两种事物相似程度越大,相似性度量也就越大[15];两种事物本质上越疏远其相似性度量也就越小。相似性度量的种类繁多,需根据实际问题进行选择,本文根据相似离度从形相似与值相似两方面进行综合判定,相对于其余的判别方式均是单方面入手判定相似性,具有一定的优势,表达式为[16]:
2.3 模型仿真结果验证与误差分析
将采集的500秒的数据对模型进行训练。将预测的第501秒至515秒角度数据与真实值计算海明距离、平均绝对误差、相似离度,仿真值与实测值对比如图5。分别计算横摇角、纵摇角、偏航角的预测数据与真实值的海明距离、平均绝对误差、相似离度,如表1所示。
将采集的700秒的数据对模型进行训练。预测的第701 秒至715秒角度数据并计算与真实值的海明距离、平均绝对误差、相似离度,仿真值与实测值对比如图6。分别计算横摇角、纵摇角、偏航角的预测数据与真实值的海明距离、平均绝对误差、相似离度,如表2所示。
将采集的1 000秒的数据对模型进行训练。预测的第1 001秒至1 015秒角度数据并计算与真实值的海明距离、平均绝对误差、相似离度,仿真值与实测值对比如图7。分别计算横摇角、纵摇角、偏航角的预测数据与真实值的海明距离、平均绝对误差、相似离度,如表3所示。
将采集的500秒的数据对模型进行训练。将预测的第501秒至515秒位置数据与真实值计算海明距离,平均绝对误差,相似离度并画出二维关系图如图8。训练500秒位置预测结果如图9。分别将x方向位置、y方向位置、z方向位置的预测数据与真实值的海明距离、平均绝对误差、相似离度,如表4所示。
将采集的700秒的数据对模型进行训练。将预测的第701秒至715秒x位置数据与真实值计算海明距离,平均绝对误差,相似离度并画出二维关系图如图10所示。
训练700 s位置预测结果如图11所示。分别将x方向位置、y方向位置、z方向位置的预测数据与真实值的海明距离、平均绝对误差、相似离度,如表5所示。
将采集的1 000秒的数据对模型进行训练。将预测的第1 001秒至1 015秒x位置数据与真实值计算海明距离,平均绝对误差,相似离度并画出二维关系图如图12。训练1 000秒位置预测结果如图13。分别将x方向位置、y方向位置、z方向位置的预测数据与真实值的海明距离、平均绝对误差、相似离度,如表6所示。
總结:
(1)传统方法预测10秒的误差约为输入数据的百分之三十,本模型预测15秒误差约为输入数据的百分之三十,因此本模型预测时间更长。
(2)学习500秒、700秒、1 000秒后预测结果的误差依次减小,误差随着训练时间的增加呈现递减趋势。
3 结 论
提出了基于DBN-PID模型的舰船运动姿态短期预测模型,依据采集的真实数据进行模型的训练与验证。主要结论如下:
(1)提出的基于DBN-PID模型的舰船运动姿态短期预测模型,可以应用于舰船运动姿态的短周期预测。
(2)现有的预测方法预测到10秒钟的时候,预测数据的误差逐渐偏大失去了预测的精度和意义,采用本模型推算得出的结果可以将预测时间延长到15秒且变化趋势基本吻合,误差较小,且精度高于现有的模型。计算量较小,适用于实时控制系统。
(3)随着训练时间的增加模型的预测结果误差呈现递减趋势,精度越来越高。
参考文献:
[1] 朱娟,张立凤,张铭.检验全球数值预报模式的相似度等指标 [J].气象科学,2018,38(2):221-228.
[2] MA N,YU L W,GU X C. On the Effect of Time-varying Ship Forward Speed on Parametric Roll Occurrence from View Point of Operational Safety [C]//5th International Maritime Conference on DESIGN FOR SAFETY and 4th Workshop on RISK-BASED APPROACHES IN THE MARINE INDUSTRIES. Shanghai:[s.n.],2013.
[3] 徐路.基于GA-BP神经网络的热带果树种植适宜度分析 [D].南宁:广西大学,2018.
[4] NING M,ZAHEERUDDIN M. Neural Network Model-Based Adaptive Control of a VAV-HVAC&R System [J].International Journal of Air-Conditioning and Refrigeration,2019,27(1):1-16.
[5] KARRA K,KUZDEBA S,PETERSEN J. Modulation recognition using hierarchical deep neural networks[C]//2017 IEEE International Symposium on Dynamic Spectrum Access Networks(DySPAN).Baltimore:IEEE,2017:1-3.
[6] NOORI R,ABBASI M R,Adamowski J F,et al. A simple mathematical model to predict sea surface temperature over the northwest Indian Ocean [J].Estuarine,Coastal and Shelf Science,2017,197:236-243.
[7] UTTAM B S,KRISHNA P S,ANJANA D,et al. Potential impact of climate change on the distribution of six invasive alien plants in Nepal [J].Ecological Indicators,2018(95):99-107.
[8] BAZZICHETTO M,MALAVASI M,BARTAK V,et al. Plant invasion risk:A quest for invasive species distribution modelling in managing protectedareas [J].Ecological Indicators,2018(95):311-319.
[9] 黄海亮,靳双龙,王式功,等.相似预报方法在山西省云量预报中的应用 [J].干旱气象,2018,36(5):845-851.
[10] 刘可新,梁犁丽,李匡,等.基于雨量测站应急机制的洪水预报方法 [J].水利水电技术,2018,49(8):87-93.
[11] KONSTANTINA A,ANGELA G,EFTERPI K,et al. Pleistocene marine fish invasions and paleoenvironmental reconstructions in the eastern Mediterranean [J].Quaternary Science Reviews,2018(196):80-99.
[12] ORFINGER A B,GOODDING D D. The Global Invasion of the Suckermouth Armored Catfish Genus Pterygoplichthys(Siluriformes:Loricariidae):Annotated List of Species,Distributional Summary,and Assessment of Impacts [J/OL].Zoological Studies,2018,57(7):1-16.[2021-07-23].http://zoolstud.sinica.edu.tw/Journals/57/57-07.pdf.
[13] NOORI R,ABBASI M R,ADAMOWSKI J F,et al. A simple mathematical model to predict sea surface temperature over northwest Indian Ocean [J].Estuarine,Coastal and Shelf Science,2017,(197):236-243.
[14] SO R,TEAKLES A,BAIK J. Development of visibility forecasting modeling framework for the Lower Fraser Valley of British Columbia using Canadas Regional Air Quality Deterministic Prediction System [J].Journal of the Air & Waste Management Association,2018,68(5):446-462.
[15] SHARIFIAN A,GHADI M J,GHAVIDEL S,et al. A new method based on Type-2 fuzzy neural network for accurate wind power forecasting under uncertain data [J].Renewable Energy,2018(120):220-230.
[16] XU R,SUGIYAMA A,HASEGAWA K, et al. Remote Transparent Visualization of Surface-Volume Fused Data toSupport Network-Based Laparoscopic Surgery Simulation [C]//Innovation in Medicine and Healthcare2015.Kyoto:Springer International Publishing,2016:345-352.
[17] 肖涵.干旱致災临界状态辨识及汉江上游未来气候情景下干旱预测研究 [D].武汉:华中科技大学,2019.
[18] 王秀娟.基于人工神经网络的保护区气温变化预测研究 [D].长春:吉林农业大学,2019.
作者简介:迟鑫鹏(1997.12—),男,汉族,黑龙江肇东人,硕士在读,主要研究方向:发射系统仿真;
郑旺辉(1966.03—),男,汉族,湖北崇阳人,研究员,工学硕士,主要研究方向:导弹发射技术与设备。