分布式小卫星MIMO-SAR超高分辨成像方法
2021-04-30杨军,周芳
杨 军,周 芳
(1.合肥工业大学 计算机与信息学院,安徽 合肥 230009;2.工业安全与应急技术安徽省重点实验室,安徽 合肥 230601)
多发多收合成孔径雷达(Multiple-Input Multiple-Output Synthetic Aperture Radar,MIMO-SAR)克服了单通道合成孔径雷达高分辨与宽测绘带之间的矛盾,是星载合成孔径雷达系统未来的重点发展方向[1-2]。相控阵天线技术是实现星载MIMO-SAR工作模式的一种主要途径[3-4],但其极大地增加了雷达的研制成本,而分布式小卫星由于发射灵活、研制周期短、成本低等优点,已成为未来实现星载MIMO-SAR工作模式的另一途径[5-6]。分布式小卫星可以通过控制天线波束指向,多个天线同时发射和接收多个频段信号来完成星载聚束MIMO-SAR构型,实现高分辨率宽测绘带成像。
聚束模式是合成孔径雷达获取高分辨目标图像的主要手段,该模式下全孔径回波信号的多普勒带宽较大。为了避免回波信号出现多普勒混叠,一般要求系统脉冲重复频率(Pulse Repetition Frequency,PRF)大于多普勒带宽,但这将大大限制观测场景的测绘带宽。为了获得大测绘带宽,有两类MIMO-SAR算法被广泛使用:抑制距离模糊算法和方位解模糊算法。抑制距离模糊算法常常通过方位相位编码(Azimuth Phase Coding,APC)来实现[7-8]。但是,这类算法要求系统脉冲重复频率大于回波信号的多普勒带宽,这无疑会增加雷达接收机采集的数据量,导致卫星存储压力过大。因此,星载聚束MIMO-SAR通常希望工作在低脉冲重复频率模式中,通过使用方位解模糊算法来消除方位模糊。文献[9]利用空间自由度对全孔径信号进行空域滤波,从而消除信号的方位模糊;但由于空间自由度受限于卫星个数,当分辨率提高导致方位模糊严重时,需要增加卫星个数来获取足够的空间自由度,这无疑导致成本的剧增。文献[10-11]对子孔径信号进行解模糊处理,大大降低了被处理信号的模糊度,从而保证空间自由度充足。但这类算法在成像之前需要拼接出全孔径信号,造成数据量的激增,极大地增加了成像处理系统的计算量。
在高分辨率合成孔径雷达系统中,需要发射宽带信号来获得距离向高分辨率。然而,超宽带信号对发射硬件设备要求高,难以通过硬件直接产生[12-13]。解决这个问题的一种方法是雷达发射窄带步进频率信号,然后通过带宽合成技术处理雷达回波获取超宽带信号[14-18]。雷达信号的带宽合成技术主要分为两类:时域带宽合成(Time-domain Bandwidth Synthesis,TBS)[14]和频域带宽合成(Frequency-domain Bandwidth Synthesis,FBS)[15-16]。频域带宽合成方法操作简单,但其要求信号的子带中心与完整频带中心刚好相隔整数个频点,否则不能精确合成。时域带宽合成方法的合成精度高,但其操作流程较为繁琐,计算量大,效率较低[11]。
基于以上问题,笔者提出了一种针对分布式小卫星聚束MIMO-SAR的超高分辨成像方法,在距离维通过发射步进频率信号来获取距离高分辨率,在方位维通过子孔径图像融合得到方位高分辨图像。首先利用空域滤波技术解除子孔径信号的方位模糊;然后提出了一种改进的时域带宽合成方法实现步进频率信号的合成;最后使用子孔径图像融合算法[19]完成子孔径信号的成像及图像融合,从而获得全孔径对应的高分辨率图像。子孔径划分技术与子孔径图像融合算法的结合,有效地减小了被处理信号的模糊度和成像系统的计算量。改进的时域带宽合成方法简化了传统时域带宽合成的操作流程,提高了频带合成效率。
1 分布式小卫星聚束MIMO-SAR工作模式及信号模型
如图1所示,多个卫星线性地分布在方位向上(不失一般性,图中以3颗卫星为例),卫星M、N、O的坐标分别为(xm,0)、(xn,0)、(xo,0),场景中心的最短斜距为RS。场景中某一点目标的坐标为P(X,RB)。
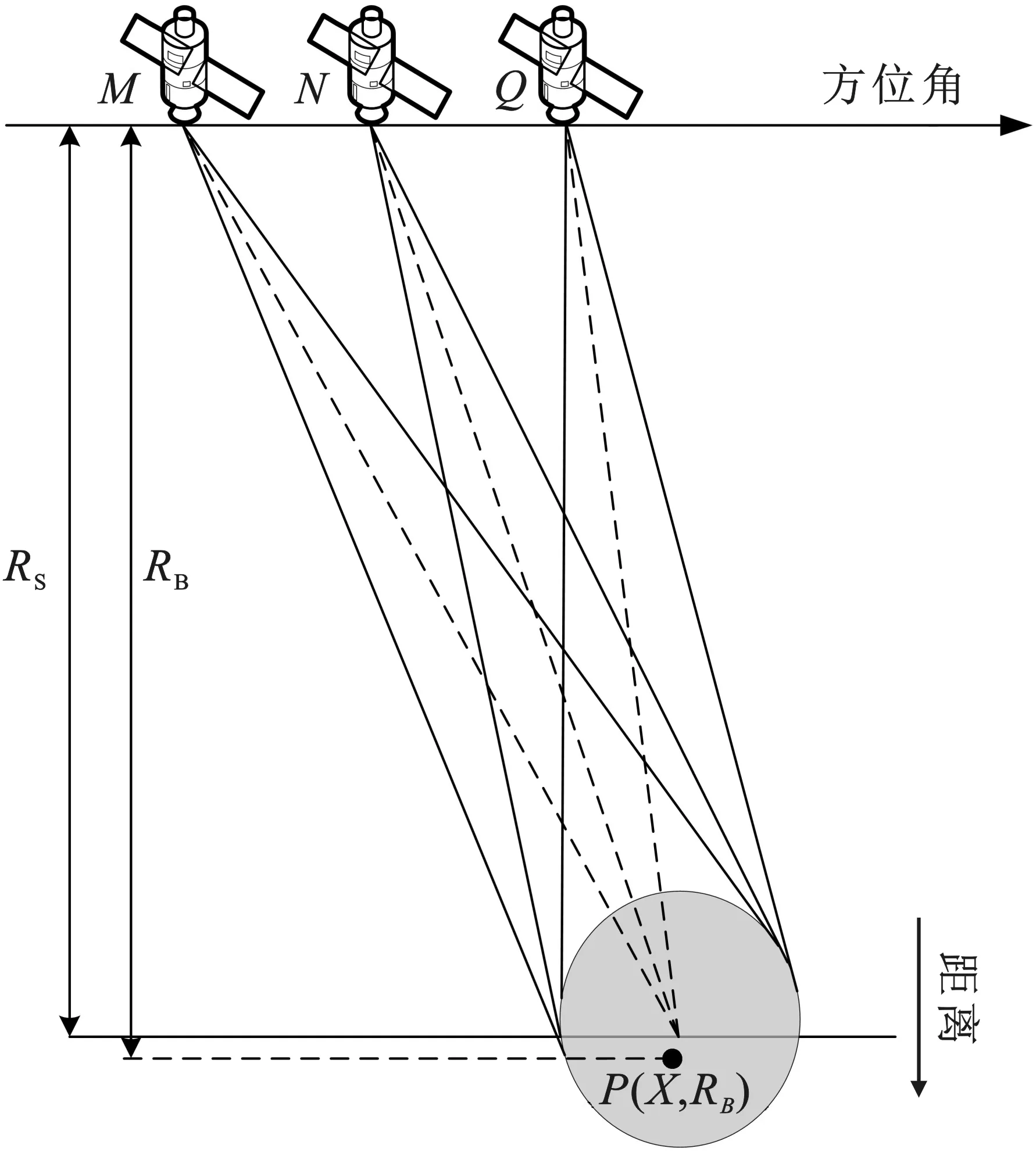
图1 星载三发三收几何模型
当卫星M发射信号,卫星N接收信号时,点目标P到雷达收发机的双程斜距为
(1)
其中,m=1,2,…,Q,n=1,2,…,Q,Q为星总量,ta为方位慢时间,v为卫星方位速度。完成斜距偏差补偿之后[20],M、N的双站工作可以视为等效相位中心的单站工作,等效相位中心位于M、N的中心坐标为
(2)
所以,斜距Rm,n等效为
(3)
因此,卫星M发射、卫星N接收的子带信号可表示为
(4)

fc(m)=fc+(k-1/2-m/2)B,
(5)
其中,fc为位于卫星线性阵列中心的卫星发射载频,B为子带信号的带宽。同一卫星发射不同卫星接收的信号位于同一距离子频带,并且子频带之间没有重叠。假设将子孔径划分为K段,则第k(k=1,2,…,K)段子孔径信号的方位时间取值范围为
(6)
(7)
2 多普勒特性分析
如果有Q个卫星接收数据,那么理论上MIMO-SAR系统可以将脉冲重复频率降低为多普勒带宽的1/Q。图2展示了单个等效相位中心所接收数据的时频图。其中,Ba为全孔径场景多普勒带宽,Binst为瞬时多普勒带宽,边缘实斜线表示场景边缘点的时频关系,中间实斜线表示场景中心点的时频关系。Ba的表达式为

图2 单个等效相位中心的时频图
Ba(m)=-Ka(m)Ta+Binst,
(8)
其中,Ka(m)=-2v2fc(m)/(cRS),为多普勒调频率,在图2中表现为实斜线的斜率。式(8)中的第1项为波束转向造成的多普勒带宽。所有等效相位中心回波信号的场景多普勒带宽为单个等效相位中心回波信号的场景多普勒带宽的并集,可表达为
Ball=-Ka(Q)Ta+Binst。
(9)
若是直接处理全孔径数据,脉冲重复频率需要大于Ball/Q。如果将全孔径划分为K段,则第k段子孔径信号的场景多普勒带宽约为[11]
(10)
其中,Ka=-2v2fc/(cRS),为中心卫星发射信号的多普勒调频率。式(10)中的第1项为波束旋转造成的多普勒带宽。第3项多普勒带宽形成的原因是:各等效相位中心在第k段子孔径信号的多普勒中心不尽相同,从而导致其各自的多普勒产生不同程度的偏移(以Katk为中心偏移)。每个等效相位中心子孔径信号的多普勒中心为Ka(m)tk,m=1,2…,Q,而所有的多普勒中心又以Katk为中心,所以子孔径信号的场景多普勒中心为Katk。
子孔径划分之后,结合MIMO-SAR的理论,则脉冲重复频率只需要满足式(11),就能够解除子孔径信号的模糊。
(11)
其中,Bsub为子孔径的场景多普勒带宽。子孔径的脉冲重复频率与Bsub的关系如图2所示。若直接对全孔径信号进行解模糊处理,则脉冲重复频率需要满足fPRF≥Ball/Q。因此,子孔径处理方式的脉冲重复频率比全孔径的小Ball/Bsub,大大降低了卫星采集的回波数据量。
3 信号处理流程
由于式(11)中的脉冲重复频率取值小于Bsub,所以子孔径信号在方位向会出现多普勒模糊。在成像之前,需要重构出方位不模糊且距离大带宽的子孔径信号。笔者提出的超高分辨率成像方法首先采用空域滤波技术解除同一子带子孔径信号的方位模糊,然后使用改进的时域带宽合成方法对步进频率信号进行带宽合成,之后使用CS-dechirp算法对子孔径重构信号进行二维聚集处理,以获得子孔径低分辨率复数图像,最后对这些子孔径复数图像进行相干融合,从而得到全孔径对应的高分辨率图像。成像方法的信号处理流程图如图3所示。图中的TxmRxn表示卫星m发射、卫星n接收的信号。
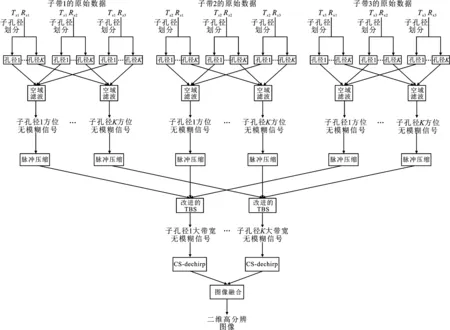
图3 三发三收模型的信号处理流程图
3.1 基于空域滤波的无模糊方位信号恢复
通过第2节的分析可知,在第k段子孔径内信号的多普勒中心为Katk。使用函数Hd(tsub)=exp(-j2πfdc(tsub+tk))将多普勒中心补偿为零,其中fdc=Katk。之后的空域滤波操作与全孔径类似。以3次模糊(Q=3)为例,根据空域滤波原理,可以构造式(12)所示的权矢量函数W(m)[9]:

(12)
其中,
(13)
将信号变换到多普勒域,使用权矢量函数W(m)对同子带模糊信号(同一卫星发射,不同卫星接收的信号)进行滤波,即可恢复出方位无模糊信号:
[Sm(fa-fPRF),Sm(fa),Sm(fa+fPRF)]=[Sm,1(fa),Sm,2(fa),Sm,3(t,fa)]W(m) ,
(14)
其中,Sm,n(fa)为模糊的信号。恢复出的方位无模糊信号Sm(fa)可表示为

(15)
其中,faM(m)=2vfc(m)/c。 得到无模糊的方位信号Sm(fa)之后,需要在距离向将子带信号合成一个大带宽信号。 笔者采用改进的时域带宽合成方法实现频带合成。
3.2 改进的时域频带合成技术
传统的时域带宽合成法有4个步骤:时域频移,相位校正,时移,频带累加。流程比较繁琐且计算过程复杂。传统的时域带宽合成由于在时域频移操作前没有消除距离频率的二次项,频移之后发生偏移的距离频率的二次项,导致后面的频谱无法相干叠加,所以需要相位校正和时移来消除距离频率二次项的偏移。如果在频移之前将距离频率的二次项消除,将大大简化频带合成的步骤。文献[11]就是在消除了距离频率二次项的基础上改进了时域带宽合成算法。文献[11]先进行距离脉压,再将频移分为两部分:时域频移小数频点间隔和频域频移整数频点间隔。
受文献[11]的启发,笔者也在频移之前消除距离频率的二次项,并将文献[11]中的两次频移合并为时域的一次频移,从而得到改进的时域带宽合成方法。该方法首先将方位已解模糊的信号变换到双频域,然后补偿掉其距离频率二次项,得到
Sm(fr,fa,tk)=ar(fr/B)aa(fa+fdc)exp(j2πfatk)×
(16)
然后对式(16)做距离向逆快速傅里叶变换,信号变为

(17)
接下来对信号在时域进行频移,构建频移函数:
(18)
式(17)和式(18)相乘以完成频移,之后对信号做距离向快速傅里叶变换,信号变为
Sm(fr,fa)=ar((fr-(m-(1+Q)/2)B)/B)aa(fa+fdc)exp(j2πfatk)×
(19)
经过上述处理之后,将各子带信号相干累加得到完整的距离频带信号。完整的距离频带信号可表示为

(20)
从式(20)中可以看出,频带合成后,信号距离向的带宽由B扩展为QB,完成了方位向无模糊、距离向具有完整带宽的子孔径信号的重构,之后采用子孔径图像融合的成像算法对此二维重构信号进行成像。
3.3 基于子孔径图像融合的成像算法
文献[19]提出了一种针对条带单站合成孔径雷达的基于子孔径复数图像融合的成像方法,笔者将其应用于聚束MIMO-SAR中。在得到各子孔径的二维重构信号之后,首先使用布谷鸟搜索算法对子孔径信号进行距离徙动补偿和距离脉压,再在方位向进行Dechirp操作以得到方位低分辨的子孔径复数图像,最后将各子孔径图像进行相干融合,得到方位全分辨率图像。子孔径图像融合成像流程图如图4所示。

图4 子孔径成像流程图
3.3.1 基于CS-dechirp的二维聚焦处理
限于篇幅,直接给出使用布谷鸟搜索算法完成信号的距离徙动补偿和距离脉压之后的结果,具体过程可见参考文献[17]。徙动补偿和距离脉压之后的信号可表示为

(21)
构建双曲相位转变的补偿函数的H1:
(22)
将式(22)乘以式(21),信号的双曲相位转变为二次相位,再对信号进行方位向逆快速傅里叶变换,可以得到

(23)
再构建Dechirp操作的函数H2,将式(23)乘以H2,完成Dechirp操作。
H2(tsub,tk)=exp(-jπKa(tsub+tk)2)。
(24)
由于式(23)的多普勒中心已补偿为零,所以Dechirp操作之后,信号的多普勒中心由补偿函数H2确定。而H2在第k段子孔径中的多普勒中心为f′dc(f′dc=-Katk),所以Dechirp之后,信号的多普勒中心变为f′dc=-Katk。为了把Dechirp操作之后的多普勒中心补偿为零,需要构建的多普勒补偿函数为
H3(tsub,tk)=exp(-j2πf′dc(tsub+tk))。
(25)

(26)
3.3.2 子孔径低分辨率复数图像的相干融合
由式(26)可知,子孔径聚焦信号的相位是关于tk的线性相位。但式(26)中的线性相位在聚焦频点fa=-KaX/v处不是一个常量,导致不同子孔径的聚焦信号在聚焦频点处的相位不尽相同,从而导致子孔径图像无法相干累加。为此,可以构造一个相位补偿函数H4使得子孔径聚焦信号在聚焦频点处的相位为一个常量。相位补偿函数H4可表示为
H4(fa,tk)=exp(-j2πfatk)。
(27)
将聚焦信号式(26)乘式(27),得到
(28)
从式(28)中可知,此时各子孔径聚焦信号的相位在聚焦频点处为零,而非聚焦点处的相位与tk呈线性关系。所以,此时各子孔径图像的叠加为相干叠加,从而使得分辨率得到提高。
4 仿真实验及结果分析
仿真实验采用图1所示的星载三发三收系统模型。每颗卫星各自发射不同载频的线性调频信号,并且接收3颗卫星的信号。仿真参数如表1所示。

表1 三发三收系统仿真参数
为了更好地展现信号频谱,首先使用单个点目标进行频带合成仿真实验。单个点目标位于场景中心。图5为单个点目标的频带合成前后的带宽。从图5(b)中可以看出,3个子带信号通过改进的时域带宽合成方法可以很好地合成为一个大带宽信号。从图5(a)与图5(b)的对比中可以看出,频带合成后的带宽大约为子带带宽的3倍,也说明了频带合成结果良好。这验证了改进的时域带宽合成方法的有效性。

(a) 点目标P1的等高线图
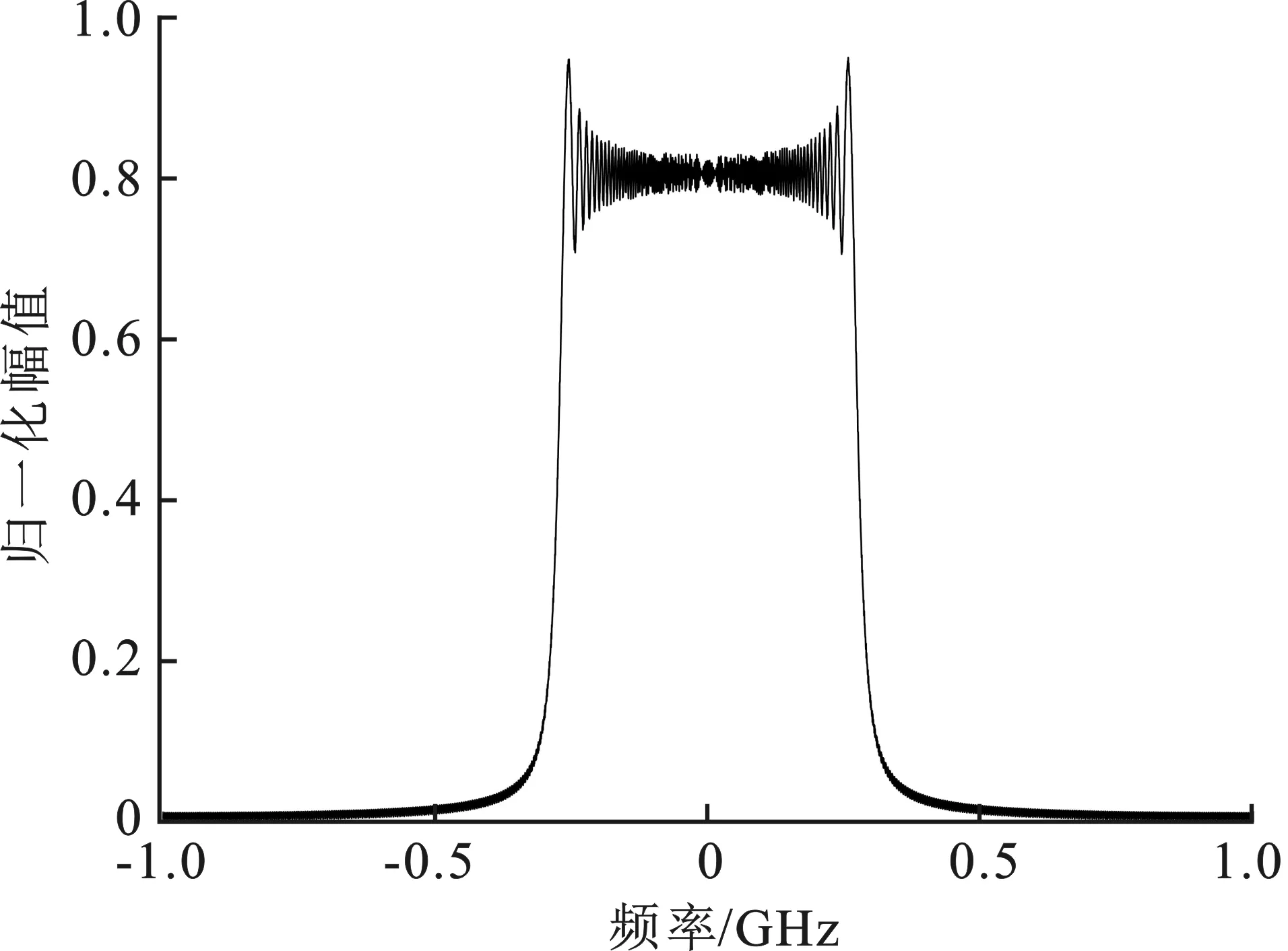
(a) 子带带宽
验证了改进的时域带宽合成方法的有效性之后,对点阵目标进行成像仿真。图6展示了点目标的分布情况:地面设有3×3均匀分布的点阵,距离向和方位向的点间距均为1 km。图6中标记出来的3点坐标分别为P1(-1 km,Rs+1 km)、P2(0,Rs)、P3(1 km,Rs-1 km),Rs为场景中心的最短斜距。

图6 点目标分布图
点目标仿真结果如图7至图9所示。图7为P1在频带合成前后的距离向剖面图。从图7中可以看出,频带合成后的距离向分辨率明显高于频带合成前的距离向分辨率,说明改进的频带合成方法的合成效果良好。图8展示了点目标P1在图像融合过程中方位分辨率的变化。从图8中可以看出,融合图像的方位分辨率随着子孔径图像数量的增多而逐步提高,说明了子孔径图像融合算法的有效性。

图7 点目标频带合成前后的距离剖面图

图8 图像融合过程中点目标的方位剖面图
图9展示了3个点目标P1、P2、P3的最终成像的等高线图。表2分析了这3个点目标成像结果的峰值旁瓣比和积分旁瓣比。从图9和表2中可以看出,无论是场景中心点(P2),还是场景边缘点(P1、P3),都能够很好地成像,这表明笔者所提方法的成像性能良好。

表2 点目标的峰值旁瓣比和积分旁瓣比
由于没有星载MIMO-SAR的实测数据,笔者将一幅实测机载合成孔径雷达图像作为面目标进行回波仿真。目标像素点布置在斜距平面,仿真参数如表1所示。仿真所用的原图如图10所示。

图10 面目标仿真原图
按照笔者提出的处理算法及流程,仿真面目标的成像结果如图11所示。图11展示的成像结果基本和原图一致,方位向已经没有模糊,并且局部放大部分的高亮目标的成像结果也很好。这验证了笔者所提算法的有效性。

图11 面目标成像结果
5 总 结
笔者提出了一种针对分布式小卫星聚束MIMO-SAR的超高分辨成像方法。首先利用空域滤波技术对子孔径信号进行解模糊处理,然后提出一种改进的时域带宽合成方法用于带宽合成,最后对子孔径信号进行成像并完成图像融合,以获得全孔径对应的高分辨率图像。对子孔径信号进行解模糊,保证了空间自由度的充足。并且,脉冲重复频率只要保证能够恢复出子孔径无模糊信号即可,这大大降低了雷达接收机采集的数据量和距离维出现模糊的风险。改进的时域带宽合成方法简化了传统时域带宽合成的操作流程,提高了频带合成的效率。在后续的成像处理中,由于是对子孔径信号进行聚焦处理,所以无须先拼接出全孔径信号,极大地降低了成像处理机的工作负荷。仿真实验证明了这个方法的可行性和有效性。
