改进型SVD-FRFT海杂波抑制方法
2021-04-30温利武丁金闪
梁 壮,温利武,丁金闪
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
受海洋气象和地理环境的影响,海面结构复杂多变,电磁散射机理十分复杂,在低入射角和高分辨率的情况下,海杂波常常表现为“三非”特性[1-3],即空间上的非均匀性,时间上的非平稳性以及统计规律上的非高斯性,其幅度值的概率密度曲线具有严重的拖尾效应[4]。海面上的小型船只、蛙人、潜水艇潜望镜、隐身舰艇等目标,雷达散射截面积很小,目标回波信号信杂比低,因此利用目标能量信息的传统检测方法,很难将其准确检测出来。另外,此类目标运动速度小,多普勒频率容易落入海杂波的多普勒频带中,难以使用传统的自适应方法在频率上将这类目标分离出来,因此海面慢速小目标检测一直是雷达目标探测的重点和难点。
海面上运动的目标,除了沿航迹的平动外,还包括围绕质心转动及振动等多种运动形式,这些运动形式统称为微动,而由目标微动产生的多普勒频率称为微多普勒频率。微多普勒频率可以反映目标的运动特征[5],利用目标的微动信息来区别目标和海杂波是近年来的一大研究热点。
近几年国内外的公开文献中,海杂波抑制方法主要包括时域对消法、子空间分解法、浅层神经网络杂波抑制等方法[6-7]。① 时域对消法,如传统的自适应动目标显示(Adaptive Moving Target Indication,AMTI)方法;该方法首先估计杂波功率谱中心,然后对杂波功率谱中心进行补偿,再通过相邻脉冲信号相减,控制动目标显示滤波器频率响应凹口对准杂波的多普勒中心,从而滤除海杂波。这类方法可以较好地滤除杂波,但由于海杂波频谱较宽,慢速或微动目标容易落入海杂波频带而被滤除,因此AMTI方法对慢速目标的检测性能不佳。② 子空间分解法,如POON等人提出了一种基于奇异值分解的方法来实现高频地波雷达(HF Surface Wave Radar,HFSWR)海杂波的抑制[8]。该方法使用某一距离单元的回波脉冲串构建Hankel矩阵,然后对Hankel矩阵进行奇异值分解,将回波信号分解到杂波子空间、信号子空间和噪声子空间,通过将杂波子空间对应的奇异值置零,可以得到降秩后的Hankel矩阵,再利用降秩后的Hankel矩阵重建时域信号,可得到海杂波抑制后的时域信号。然而在实际情况中,杂波子空间对应的奇异值数目及其所在信号阶数未知,因此需要使用到杂波的先验信息,难以实现自适应滤除海杂波。③ 陈小龙等人提出的基于高斯短时分数阶Fourier变换的海面微动目标检测方法,首先使用海尖峰判别方法对回波信号进行数据筛选,然后采用高斯短时分数阶傅里叶变换对微动信号进行增强处理,以改善回波信号的信杂比[9]。④ CHEN等人提出一种奇异值分解——分数阶傅里叶变换(Singular Value Decomposition-Fractional Fourier Transform,SVD-FRFT)的滤波方法来实现HFSWR海杂波的抑制[10]。该方法利用了目标信号和杂波信号在调频信息之间的差异。当目标和杂波的频谱混叠时,该方法仍然具有较好的杂波抑制性能,首先通过最优分数阶傅里叶变换使得目标信号达到最优的频率聚集度,然后使用傅里叶逆变换将信号变换到FRFT时域,并使用SVD方法提取一阶主分量,即可得到较为纯净的目标信号。但是该方法只适用信杂比较大且目标回波信号多普勒调制近似为线性调频的情况,而在信杂比较低时,反而容易提取杂波信号而抑制目标信号。⑤ 基于浅层神经网络的杂波抑制方法,如朱人杰提出的基于遗传小波神经网络的混沌时间序列预测方法[11],来实现海杂波抑制,该方法利用了海杂波混沌特性及海杂波短期可预测的假设。首先通过遗传小波神经网络重构海杂波动力学系统,实现对杂波信号的预测;当系统预测误差达到重构系统精度时,将幅度较强的杂波信号转换为幅度较弱的随机噪声信号,但是若该方法确定嵌入维和嵌入延迟的方法选取不当,使得重构的混沌系统不能很好地表征杂波特性,将严重影响杂波抑制效果,且混沌系统对噪声异常敏感,具有明显的“蝴蝶效应”,容易造成系统的异常和不稳定,且越来越多的学者对海杂波的混沌特性假设提出质疑[1]。
笔者考虑了目标回波多普勒频率的非线性调制以及脉冲回波序列信杂比的波动,利用目标及杂波的时频信息对SVD-FRFT方法进行了诸多改进,改进后的方法采用分块处理、整体判决的思想,主要包括目标及杂波的初步分离、信号分量进一步提纯、信号分量判决三部分。目标及杂波的初步分离,将目标回波划分到雷达回波的某一阶信号分量中,在该阶信号分量中,目标回波为主要成分,杂波及噪声为次要成分;信号的进一步提纯保留了各阶信号分量中的主要成分,丢弃次要成分;信号分量判决用来判定各阶信号分量为信号分量、杂波分量或噪声分量。所提方法有效实现了海杂波的抑制,以及运动目标微多普勒信息的提取,能够适应海杂波和目标信号回波信噪比的变化。在低信杂比的情况下,仍然可以有效地提取微弱目标的多普勒信息,并且适用于多目标环境中。通过仿真实验和实测数据实验,证明了所提方法的有效性和可靠性。
1 海面目标微多普勒回波建模
按照实际情况,对海面目标的微动运动进行建模。目标或目标部件除质心平动以外的振动、转动等微小运动,统称为微动。海面目标的微动主要为六种运动的组合,即垂荡、纵荡、横荡、纵摇(横滚)、横摇(俯仰)、艏摇(偏航)。其中垂荡、纵荡和横荡属于围绕质心的振动运动,垂摇、横摇和艏摇属于围绕质心的转动运动。利用微动目标散射中心的雷达径向运动轨迹,就可以计算其微多普勒调制回波信号,因此,需要将微动目标散射中心的空间运动轨迹投影到雷达视线方向上。投影需要涉及空间坐标系变换,即目标运动坐标系Cmov(x,y,z)、目标静止坐标系Cref(X,Y,Z)、雷达视线坐标系Crlos(q,r,h)之间的转换[12],如图1所示。三种坐标系都是右手系,以海面上的舰船目标为例,目标运动坐标系Cmov的原点始终固定在舰船的质心,x轴始终指向船头方向,因此,目标运动坐标系的坐标原点和坐标轴方向就会随着目标微动而不断振动及旋转;目标固定坐标系Cref的坐标原点位于初始时刻舰船质心位置,X轴指向初始时刻舰船的船头方向;雷达视线坐标系Crlos的坐标原点和目标固定坐标系相同,r轴指向为雷达视线方向。

图1 坐标系Cmov、Cref、Crlos示意图
目标的散射中心在目标运动坐标系Cmov的坐标值为(x0,y0,z0)T,则该散射中心在目标固定坐标系的坐标值Cref可以表示为
(1)
其中,R(θx(t))表示绕x轴旋转的旋转矩阵,θx(t)表示绕x轴的旋转角度,即目标的横滚角,可以表示为受扰动的简谐运动,X0(t)′表示由于目标纵荡而导致的目标运动坐标系的坐标原点O′和目标固定坐标系的坐标原点O之间的偏移。同理,可以得到目标俯仰运动旋转矩阵R(θy(t)),偏航运动旋转矩阵R(θz(t)),横荡运动偏移量Y0(t)′以及垂荡运动偏移量Z0(t)′。为了使目标微动建模更具有普适性,目标微动旋转角度、旋转周期、振动幅度、振动周期、目标散射中心在目标运动坐标的坐标值都为一定取值范围内的随机数。
目标散射中心在雷达视线坐标系的坐标值为
[q0(t),r0(t),h0(t)]T=R(φ)·[X0(t),Y0(t),Z0(t)]T,
(2)
其中,φ为雷达视线坐标系Crlos的r轴与目标固定坐标系Cref的Y轴之间的夹角。那么由目标微动调制后目标基带回波信号可以表示为
(3)
其中,Pc为杂波功率,SCR表示目标的信杂比,a(t)表示单位功率化的回波脉冲序列幅度,可使用一阶AR模型建模[13],r(t)表示目标散射中心在雷达径向投影的坐标值,λ表示雷达发射信号波长,φ0表示随机初始相位。由于目标的旋转和振动均建模为受扰动的简谐运动,那么由目标微动产生的多普勒调制必然是非线性的,但是目标微动产生的多普勒调频率的变化在慢时间上变化较为缓慢,因此由目标微动产生的多普勒调制可以近似为分段线性调频。
2 基于时频信息的改进型SVD-FRFT海杂波抑制方法
现有的SVD-FRFT海杂波抑制方法,是假设目标基带回波信号的多普勒调制为线性调频,通过对雷达基带回波信号进行最优分数阶傅里叶变换使得目标回波的能量聚集度最优,此时,提取信号的一阶分量即可得到抑制海杂波及噪声后的回波信号[10]。但是,当雷达回波信杂比很低时,即使对雷达回波信号进行了最优分数阶傅里叶变换,目标信号频谱仍然可能淹没于杂波信号频谱中,此时分数阶傅里叶变换的阶数并不是目标回波的最优变换阶数,即无法有效利用目标回波的多普勒调制信息;另外,SVD-FRFT方法没有考虑信杂比的波动,在FRFT时域中,若目标信号频谱的峰值大于杂波信号频谱的峰值,则目标信号存在于一阶分量中,反之,目标信号则存在于二阶分量或其他高阶分量中,而SVD-FRFT始终认为目标信号存在于一阶分量中,这显然是不合理的。此外,SVD-FRFT方法假设目标回波信号的多普勒调制为线性调频,但是通过上一节的回波建模,微动目标回波信号的多普勒调制更接近分段线性调频,因此,将雷达基带回波信号近似看作分段线性调频信号更为合理。笔者所提海杂波抑制方法流程图如图2所示。

图2 基于时频信息的改进型SVD-FRFT海杂波抑制方法流程图
基于上述原因,论文对SVD-FRFT方法进行了以下几个方面的改进:
(1) SVD-FRFT方法利用了目标回波信号的多普勒调制信息,适合于处理较长的回波脉冲序列,但是由于目标回波的多普勒徙动效应,较长脉冲序列的目标回波带宽可能会更宽,从而目标和杂波的频谱混叠程度更加严重。因此,为了充分利用回波脉冲序列的时频信息,改进方法采用分块处理、整体判决的思想,对较长的回波脉冲序列划分子脉冲块处理。
(2) 考虑到雷达回波信号信杂比的波动性,改进方法分两个过程来提取目标回波信号:海杂波与目标回波信号的初步分离,信号分量的进一步提纯;初步分离将目标信号划分到雷达回波信号的某阶信号分量中,在该阶信号分量中,目标信号能量大于海杂波信号能量,之后对该阶信号分量提纯,进一步抑制海杂波。
(3) SVD-FRFT方法假设目标回波信号的多普勒调制为线性调频,通过对其进行最优分数阶傅里叶变换,使得目标信号在FRFT域能量聚集度最优。论文将目标回波信号多普勒调制近似为分段线性调频,通过分段最优分数阶傅里叶变换,使得回波信号在FRFT域的能量聚集度最优,便于后续提取。
(4) 引入归一化时频脊二次拟合误差来对海杂波分量与目标信号分量进行自适应门限判决。
2.1 海杂波与目标回波信号的初步分离
对于包含N个脉冲的脉冲回波序列,以一定重复间隔划分子脉冲块,并使用Hankel-SVD方法提取每个子脉冲块的前Q阶信号分量。将各个子脉冲块的前Q阶信号进行关联,得到整体信号的前Q阶信号分量,实现目标信号与海杂波的初步分离。使用Hankel-SVD方法提取的第一阶信号分量为回波信号脉冲串频谱的一个频率峰值及其附近的信号,第二阶信号分量为第二个频率峰值及其附近的信号,以此类推。海杂波和目标信号的能量相较于噪声较大,因此,海杂波和目标主要分布于前Q阶信号分量中,其余高阶信号分量为雷达接收机收到的噪声。以第m个子脉冲块的第q阶信号分量的提取为例,首先使用第m个子脉冲块回波信号构建汉克尔矩阵,如下式:
(4)
其中,C表示汉克尔矩阵的列数,即Hankel-SVD分解后信号分量的个数。C取值越大,分解得到信号分量个数越多,对信号空间的划分更精确。但此时杂波信号分量对应的奇异值个数也会相应增加,因此C需要根据具体的操作环境选择。对构建的汉克尔矩阵进行SVD分解,保留第q个奇异值,而将其它奇异值置零,进行上述过程的逆过程,即可得到第m个子脉冲的第q阶信号分量。
如果子脉冲块m的i阶分量和子脉冲块m+1的j阶分量属于相同的信号,那么在子脉冲块重复区域,它们的时频图应该是近似相同的。时频脊线为信号时频图上频率轴的峰值沿时间维的变化曲线,时频脊线的连续性可以反映信号时频图的连续性[14],因此可采用时频脊线最小误差和进行子脉冲块间各阶信号关联。如图3所示,利用时频脊线的连续性对子脉冲块间的各阶信号分量进行关联,其中子图标题“2,1”表示第2个子脉冲块的一阶信号分量,横轴表示时间轴,纵轴表示频率轴。在子脉冲块2和子脉冲块3的重复区域,子脉冲块2的一阶信号分量与子脉冲块3的一阶信号分量对应的时频脊线近似相同,见图3圈选部分。因此,将子脉冲块2的一阶信号分量与子脉冲块3的一阶信号分量关联。同理,将其余信号分量关联,可得到整体信号的前Q阶信号分量。

图3 子脉冲块间各阶信号关联意图
2.2 信号分量的进一步提纯
经过2.1节所述处理后,海杂波和目标信号主要分布在不同的信号阶数上,但是在目标信号所在的阶数上,仍可能有较多的海杂波残余,为此,需要对各阶信号分量进一步提纯。目标信号与海杂波初步分离后,假设目标信号位于整体信号的第q阶信号分量,那么在该阶信号分量中,目标回波为主要成分,杂波及噪声分量为次要成分。使用自适应分段SVD-FRFT方法对整体信号的前Q阶信号分量分别进行处理,保留各阶信号分量的主要成分,滤除次要成分。
经过第1节的建模分析,将目标回波信号近似为分段线性调频信号,相较于近似为线性调频信号更为合理,因此,需要对长时观测信号进行分段。自适应分段是从预设的分段点数(如256点,512点或1 024点等)选取其中较优的分段点数。整体信号某一阶信号分量的分段点数的选取标准是对分段后的该阶信号的每一段进行其相应的最优分数阶傅里叶变换,使得整体信号在该阶信号分量的能量聚集度最优。笔者使用能量谱密度熵来衡量能量聚集度,能量谱密度熵越小,表明能量聚集度越优。整体信号的能量谱密度熵计算公式如式(5)所示:
xg=[xg(1)xg(2)xg(3) …xg(NG)] ,
(5)

(6)
对整体信号的前Q阶信号分量分别进行自适应分段,以第q阶信号的第p段为例,自适应分段后的SVD-FRFT处理步骤为:对第q阶信号的第p段进行其最优分数阶傅里叶变换,然后使用逆傅里叶变换将其变换到FRFT时域,在FRFT时域选用合理的列数使用Hankel-SVD方法提取一阶信号分量,对提取到的一阶信号分量进行傅里叶变换以及最优FRFT逆变换,即可实现对第q阶信号的第p段提纯。对第q阶信号的各段分别进行提纯后,拼接即可得到整体信号第q阶信号分量的提纯结果。
2.3 归一化时频脊线二次拟合误差判决
对整体信号的各阶信号分量进行提纯后,需要对各阶信号分量进行判决,判断其属于目标信号分量还是属于杂波信号分量。判决原理基于以下事实:运动目标的速度变化是连续的,因此其对应的多普勒频率变化也应该是连续的,因此,在目标回波的时频图上,频率轴上的峰值能量沿时间维的变化应该是连续的,即目标回波信号的时频脊是连续的,其变化趋势可采用二次曲线进行拟合,而海杂波和噪声在脉冲串持续时间内的变化是剧烈的,不能使用二次曲线拟合。
时频脊线是时频图中频率轴的峰值沿时间轴的变化曲线。对提纯后的每一阶信号分量进行短时傅里叶变换可得到该阶信号的时频图,提取频率轴峰值沿时间的变化曲线,可得到该阶信号的时频脊线。论文并不关心时频脊线的频率范围,而是关心其变化趋势,因此需要对时频脊线进行归一化。采用归一化时频脊二次拟合误差来进行判决,当该阶信号的归一化时频脊二次拟合误差小于门限值时,将该阶信号判决为目标信号而保留下来;当该阶信号的归一化时频脊二次拟合误差大于门限值时,将该阶信号的判决为杂波信号或噪声信号而被丢弃。对于判决门限,可以根据杂波归一化时频脊二次拟合误差的统计信息以及待检测单元周围的参考单元的归一化时频脊二次拟合误差来自适应设定,可以实现恒虚警判决。
3 海面目标微多普勒回波建模仿真实验及实测数据实验
在本节,使用仿真实验和实测数据实验对所提方法进行验证。仿真实验中,海杂波为1993年IPIX数据集中的实测海杂波数据,目标回波为仿真数据,根据实测海杂波功率和预设信杂比来设置仿真目标回波信号幅度,以测试所提方法在不同信杂比以及多目标环境中的表现性能。实测数据实验中,海杂波和目标回波都是真实回波数据,分别采用IPIX中含目标实测回波数据以及“雷达对海探测数据共享计划”[15]中含目标实测数据来对所提方法的有效性进行验证。IPIX及“雷达对海探测共享计划”数据集中雷达的具体参数如表1所示。
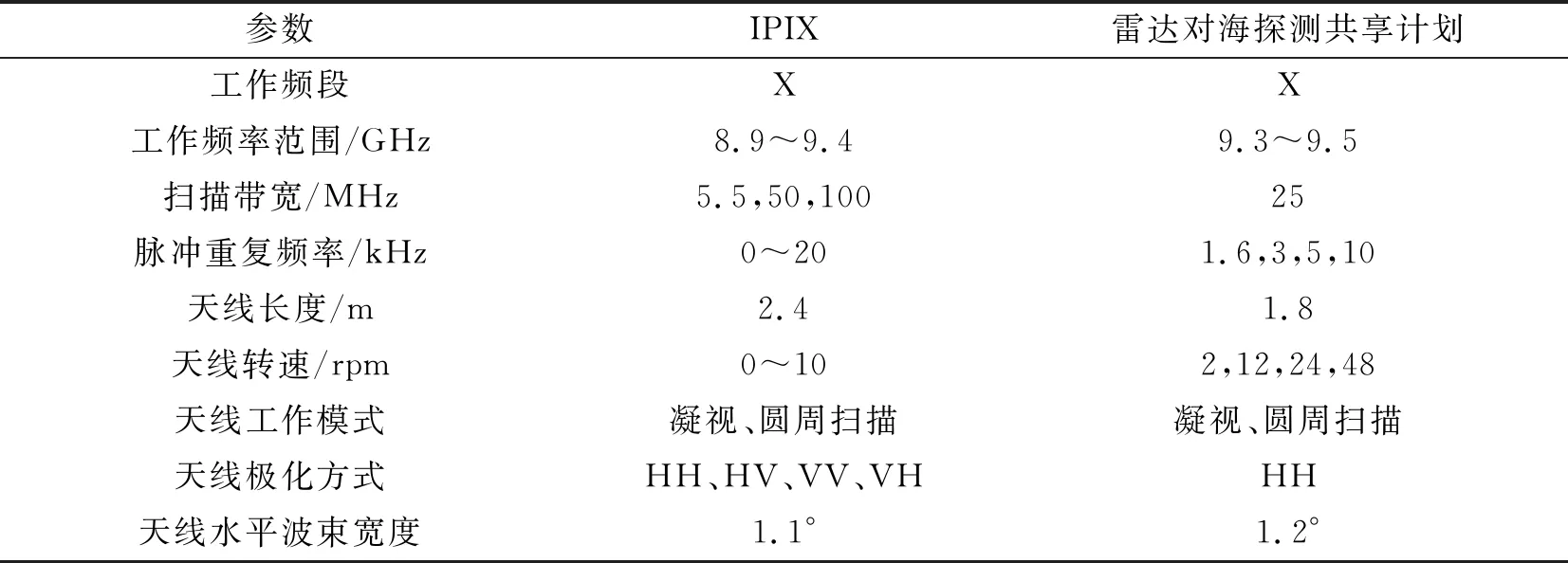
表1 IPIX及“雷达对海探测共享计划”数据集的参数
3.1 仿真实验
海杂波选取IPIX数据集17号数据中杂波单元的回波数据,数据录取时间为1993年11月7日,测试海面浪高为2.1 m,风速为9 km/h,海况等级为4级。
图4对应的仿真中,目标回波信杂比为-20 dB,在0~1 s内,目标回波多普勒频率位于海杂波的多普勒频带内,目标被完全淹没,脉冲回波序列中的脉冲数为2 048,子脉冲块的脉冲数为512,子脉冲块间的重复脉冲数为256 。图4(a)为仿真目标回波信号对应的时频图,其中已将多普勒频率转换为对应的多普勒速度,图4(b)为仿真目标叠加实测海杂波的回波信号对应的时频图,由于杂波功率较大,难以从中分辨出目标信号对应的频谱,图4(c)为使用SVD-FRFT方法处理后的时频图,可以看到处理后,并没有提取到目标回波信号,反而抑制了目标信号。这是由于杂波功率太大,分数阶傅里叶变换及奇异值分解后,信号的一阶分量仍然为杂波信号,而目标信号存在于其他高阶分量中,杂波被提取从而使目标信号被抑制。图4(d)为笔者所提方法处理后回波信号对应的时频图,其中Q取值为3,在海杂波与目标回波初步分离中,Hankel矩阵的列数取12,在各阶信号的进一步提纯中,Hankel矩阵的列数取128。

图4 所提方法与SVD-FRFT处理结果示意图
如图5所示,整体信号各阶信号分量提纯后,第一阶信号分量归一化时频脊的二次拟合误差为18.19,第二阶信号分量归一化时频脊的二次拟合误差为0.21,第三阶信号分量归一化时频脊的二次拟合误差为4.32,只有第二阶信号分量的拟合误差小于误差门限而被保留下来,第一阶和第三阶信号分量被丢弃。论文所提方法准确抑制了海杂波信号,并实现了目标信号的提取。

图5 整体信号各阶信号分量归一化时频脊二次拟合
为了验证所提方法在不同输入信杂噪比的表现性能,在不同输入信杂噪比的情况下,分别进行多次试验,实验结果如表2所示。信杂噪比的计算选取目标和杂波频谱不重叠区域,目标频带范围内的功率为目标功率,目标频带范围外的功率为杂波与噪声的功率和。由表2可以得到,输入信杂噪比在-20 dB~5 dB范围内,论文所提方法始终有效。当输入信杂噪比较低时,SVD-FRFT海杂波抑制方法会失效,当输入信杂噪比高时,论文所提方法的信杂噪比增益略微小于SVD-FRFT方法。这是由于在海杂波与目标回波的初步分离过程中,有少量的目标能量分散到其它阶信号分量中,但所提方法在高输入信杂噪比时,输出信杂噪比仍可以达到20 dB左右,因此,相比于在低输入信杂比的情况下海杂波抑制性能的改善,所提方法在高输入信杂噪比情况下的少量性能损失可以忽略不计。随着输入信杂噪比的增加,所提方法处理后的输出信杂噪比也逐渐增大,当输入信杂噪比增大到一定程度时,输出信杂噪比不再增加,信杂比噪比增益也呈现先增大后减小的趋势。这是由于输入目标信号功率太大时,目标信号会逐渐弥散于多阶信号分量中,而在信号提纯步骤中只保留了一阶信号分量,因此,目标信号功率会被少量抑制。

表2 不同输入信杂噪比时,所提方法及SVD-FRFT海杂波抑制方法的性能
图6为一个距离单元存在两个目标时,所提方法的处理结果;两目标的信杂比约为-3.5 dB,其中,目标1与海杂波在频谱上基本完全混叠,目标2和海杂波在频谱上可分离。使用SVD-FRFT方法只提取到了目标1的回波信号,而目标2的回波信号被抑制。这是由于在奇异值分解中,目标1的回波信号位于一阶分量而被保留,而目标2的回波信号位于其它阶分量而被抑制。使用论文所提方法处理后,在时频图上两目标都清晰可见,海杂波被抑制,两目标被准确提取。由于海尖峰的影响,目标1在时频图上的轨迹略微有点弯曲。
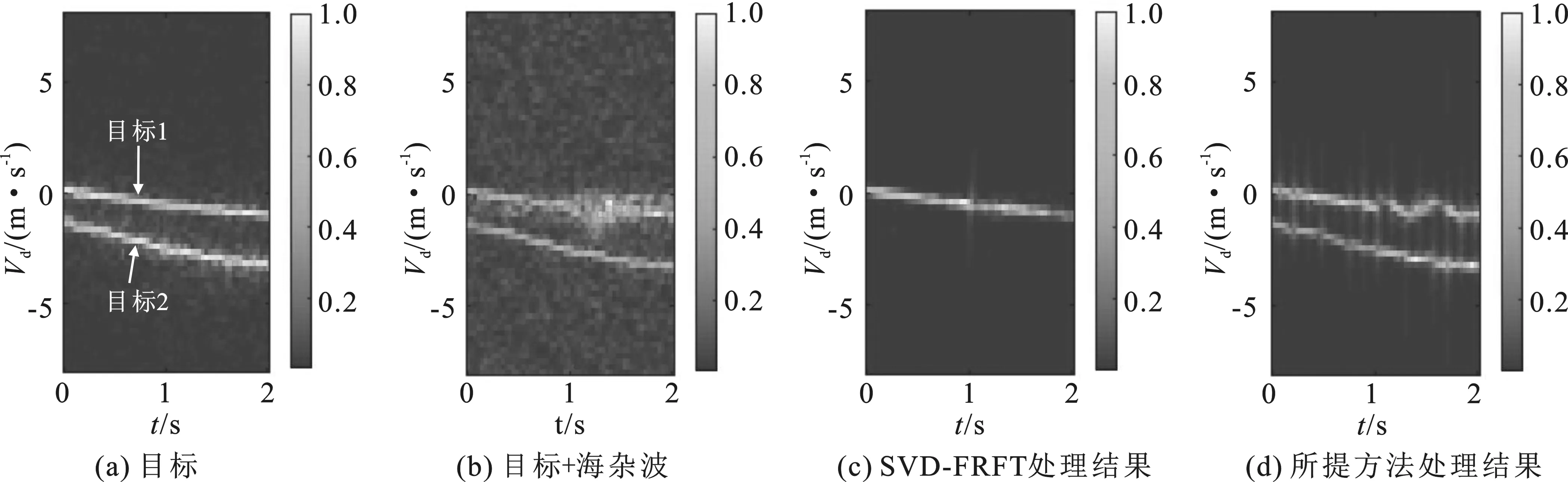
图6 所提方法与SVD-FRFT方法在多目标环境中处理结果示意图
3.2 实测数据实验
实测数据1选用IPIX数据集中,1998年2月4日17点01分的测量数据,截取2 048个相干脉冲,该段数据中目标信杂比约为-16 dB;实测数据2选用“雷达对海探测数据共享计划”于2019年10月12日11点24分在山东烟台养马岛记录的实测数据,该段数据中所含目标的信杂比约为-3 dB。
图7为所提方法及SVD-FRFT方法在实测数据1的处理结果,图8为所提方法及SVD-FRFT方法在实测数据2的处理结果。可以看到,论文所提方法都有效地提取到了目标信号且抑制了海杂波及噪声,而原来的SVD-FRFT海杂波抑制方法失效。
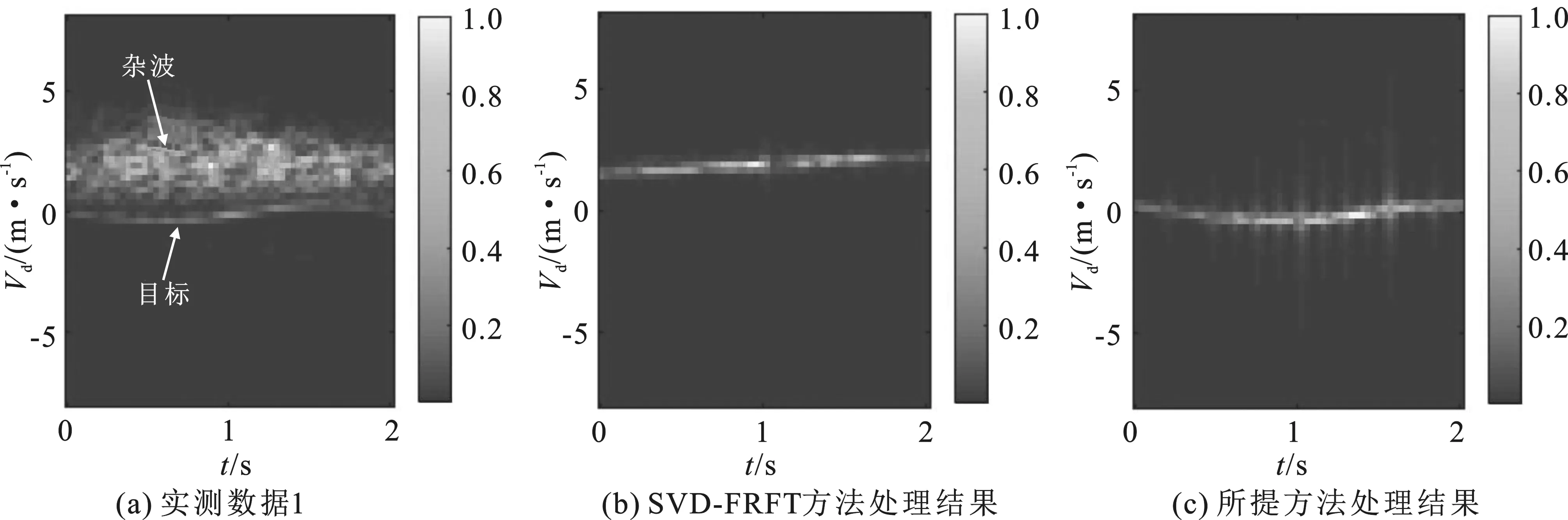
图7 所提方法及SVD-FRFT方法在实测数据1的处理结果示意图

图8 所提方法及SVD-FRFT方法在实测数据2的处理结果示意图
4 结束语
笔者提出了一种基于时频信息的改进型SVD-FRFT海杂波抑制方法,首先通过划分子脉块及块间各阶信号关联提取较长回波脉冲序列的前Q阶信号分量,实现目标信号与杂波信号的初步分离;然后通过自适应分段SVD-FRFT对各阶信号分量进一步提纯;最后使用归一化时频脊线的二次拟合误差对杂波信号与目标信号进行自适应判定。在低信杂比、目标与杂波频谱混叠以及多目标环境下,论文所提方法仍能较好地抑制海杂波信号。仿真实验和实测数据实验验证了所提方法的有效性。
