基于纯电动汽车的驾驶性评价技术研究
2021-04-30马腾张天强刘元治张鑫
马腾 张天强 刘元治 张鑫
(1. 中国第一汽车股份有限公司 新能源开发院,长春130013;2. 汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)
主题词:纯电动汽车 驾驶性 主观评价 客观评价
1 引言
随着全球能源形势紧张和环境保护意识增强,节能环保的新能源汽车得到全社会高度重视[1]。纯电动汽车具备零排放、结构简单、技术门槛低、噪音小、加速快和使用成本低的特点[2]受到国家、汽车行业重视和消费者青睐,《新能源汽车产业规划(2021-2035年)》提出,到2025年新能源汽车新车销售量要达到汽车新车销售总量的20%左右[3]。
绝大部分纯电动汽车由电机通过刚性连接一级齿轮减速机构直接驱动车轮,没有传统汽车中的变速箱,减少了离合器或液力变矩器这些柔性部件。同时,电机具备转矩动态响应快、低速输出大转矩、同一转动方向下正负转矩快速切换的特性[4]。如果对电机转矩控制不合理,极易造成车辆纵向窜动、驾乘人员眩晕等不适驾乘体验。给客户提供良好的驾驶体验是各大汽车厂商赢得客户口碑、保持品牌竞争力的重要指标[5]。
车辆行驶时驾驶员的动态感觉、决策行为、行为动作和车辆瞬态响应的交互感觉,都属于驾驶性的研究范畴,驾驶员的期望和满意度是驾驶性评价的最终依据[6]。
本文在理论分析和实践基础上,基于纯电动汽车,对车辆驾驶性评价技术进行研究,分析了驾驶性主要影响因素,提出了驾驶性评价工况、主观评价指标和客观评价指标,同时根据客观评价方法可进行驾驶性验证优化,提升车辆驾驶性能及乘坐舒适性。
2 纯电动汽车驾驶性原理分析
2.1 驾驶性定义
驾驶性,即车辆的驾驶性能,对于纯电动汽车,指在规定的环境、驾驶条件下,车辆的电机及传动系统平顺地执行驾驶员输入指令的能力。在驾驶性评价中,车辆的瞬态过程响应占较大权重。驾驶性开发的目的主要是提高驾驶员在动力性、舒适性方面的驾驶预期,以便实现最好的驾驶体验。
2.2 典型两驱纯电动汽车构型
纯电动汽车构型根据电机个数和变速箱类型进行分类,主要包括单电机直驱、前后轴双电机直驱、轮毂电机和单电机两挡变速箱4类。现在市场上大部分电动车为电机刚性连接一级齿轮减速机构直接驱动车轮的单电机直驱构型,如图1所示。本文以单电机直驱构型的纯电动汽车为研究对象,对车辆驾驶性评价技术进行研究。

图1 单电机直驱构型示意
2.3 驾驶性影响因素分析
对于纯电动汽车与传统燃油汽车,由于电机与发动机扭矩响应特性不同以及车辆传动系统不同的特点,使得纯电动汽车驾驶性影响因素主要体现在以下2个方面。
(1)传动系统中齿轮的间隙,此为机械系统固有特性,虽然传动系齿轮间隙可以通过齿轮双面精磨、提高加工精度等工艺手段减小间隙影响,但无法完全去除。同时由于纯电动汽车驱动电机与传动系之间为刚性连接,没有传统燃油汽车中的变速箱,缺少了离合器或液力变矩器等柔性部件,使得传动系间隙特性被放大,对驾驶性影响非常突出;同时,传动系刚度特性也对驾驶性有一定影响。
(2)对电机转矩控制时,由于电机具备转矩动态响应快、低速输出大转矩、同一转动方向下正负转矩快速切换等特性,使得电机转矩控制精度、电机转矩变化率等对驾驶性影响很大。
因此,在车辆开发阶段,需设计驾驶工况测评车辆表现,根据车辆表现结果,对电机转矩控制进行针对性标定优化,来提升车辆驾驶性。
3 纯电动汽车驾驶性评价
3.1 驾驶性评价工况
基于纯电动汽车,驾驶性评价主要从换挡平顺性能、起步加速性能、瞬态响应性能、匀速行驶性能、能量回收减速性能、制动稳定性能方面进行评价分析。
根据上述的6 个性能方向,驾驶性评价工况主要包含以下内容。
(1)换挡平顺性能:静态挡位切换,车辆静止不动,挡位在P、R,P、D以及R、N、D之间快速切换;
(2)起步加速性能:
①爬行起步加速,车辆静止不动时,挡位挂在D或R挡,松开制动踏板,不踩油门踏板,车辆自由加速至稳定车速;
②原地起步加速,车辆静止不动时,挡位挂在D或R 挡,松开制动踏板后,完全踩下或者部分踩下油门踏板,车辆加速至稳定车速;
(3)瞬态响应性能:
①匀速或减速行驶时加速响应,车辆匀速或减速行驶时,挡位在D 挡,完全踩下或者部分踩下油门踏板,车辆加速至稳定车速;
②匀速或加速行驶时减速响应,车辆匀速或加速行驶,挡位在D 挡,完全松开油门踏板,不踩制动踏板,使车辆进入减速状态;
(4)匀速行驶性能:匀速行驶,车辆加速至一定车速,挡位在D 挡,极小开度微调油门踏板使车辆保持匀速行驶;
(5)能量回收减速性能:零开度加速踏板制动踏板减速感,车辆加速至一定车速以上,挡位在D挡时,完全松开油门踏板,不踩制动踏板,使车辆进入减速状态,滑行至最低稳定车速;
(6)制动稳定性能:不同制动踏板开度减速感,车辆加速至一定车速以上,挡位在D 挡,完全松开油门踏板,完全踩下制动踏板或者部分踩下制动踏板,使车辆进入减速状态。
根据以上工况,对车辆驾驶性进行测评,通过主观评价直观感受车辆表现,快速发现可能存在的问题;通过客观评价,测试车辆具体问题点,有针对性进行标定优化,提升车辆驾驶性。
3.2 驾驶性主观评价
主观评价指在不使用试验仪器的条件下,依靠人的视觉、听觉、味觉、嗅觉、触觉和身体深部感觉、平衡感觉、内脏感觉对产品性能做出评定的工作。
基于纯电动汽车,驾驶性主观评价指标主要包含:冲击、迟滞、涌动、加速感、减速感、平顺性、眩晕感。其中,冲击指标主要评价车辆加减速过程中,车辆前后方向的内部撞击、振动的感受。迟滞、加速感两项指标主要评价车辆加速过程中,车辆前后方向的加速响应急缓、整体加速过程的感受。涌动、减速感两项指标主要评价车辆减速过程中,车辆前后方向的一次性加速、整体减速过程感受。平顺性、眩晕感两项指标主要评价车辆加减速过程中,车辆整体加减速连续性感受以及身体平衡感受。
主观评价时应有3名以上具有主观评价资质的工程师组成的评价团队,按照3.1 所述的驾驶性工况分别进行测评,测评结束后应进行团队讨论,最终形成评价结果。
3.3 驾驶性客观评价
客观评价指使用试验仪器,通过将试验仪器布置在车辆特定位置测试车辆数值对产品性能做出评定的工作。
基于纯电动汽车,驾驶性客观评价指标主要包含最大加速度、响应时间、电机转速峰峰值、加速度峰峰值和冲击度。其中,最大加速度指标主要评价车辆纵向最大加速能力;响应时间指标主要评价车辆加减速需要的时间;电机转速峰峰值主要评价电机转速波动变化;加速度峰峰值和冲击度指标主要评价车辆加减速过程中纵向加速度变化。
驾驶性客观评价使用的主要试验仪器为加速度传感器、GPS 和CAN 工具。其中,加速度传感器主要测试车辆纵向加速度变化,GPS主要测试车辆纵向车速变化,CAN工具主要测试加速踏板、制动踏板、电机转速和电机转矩的CAN网络数据。
客观评价,应将试验仪器安装在车辆特定位置上,按照3.1 所述的驾驶性工况进行测试。测试结束后对试验仪器采集到的加速踏板、制动踏板、电机转速、电机转矩、车辆速度和车辆加速度数据分析客观评价指标,可通过优化不同踏板开度下的电机转矩值、踏板变化时的电机转矩变化率、电机转矩随踏板开度和车速变化的变化值进行优化。优化后,需要对车辆状态进行复测,分析客观评价指标优化结果,同时进行主观评价。
3.4 实车测试验证
本文基于某款单电机直驱构型纯电动汽车(表1),根据3.1 中所述的驾驶性工况进行了驾驶性主观评价和客观评价,并对客观评价结果(表2)进行分析优化,提升了车辆的驾驶性。
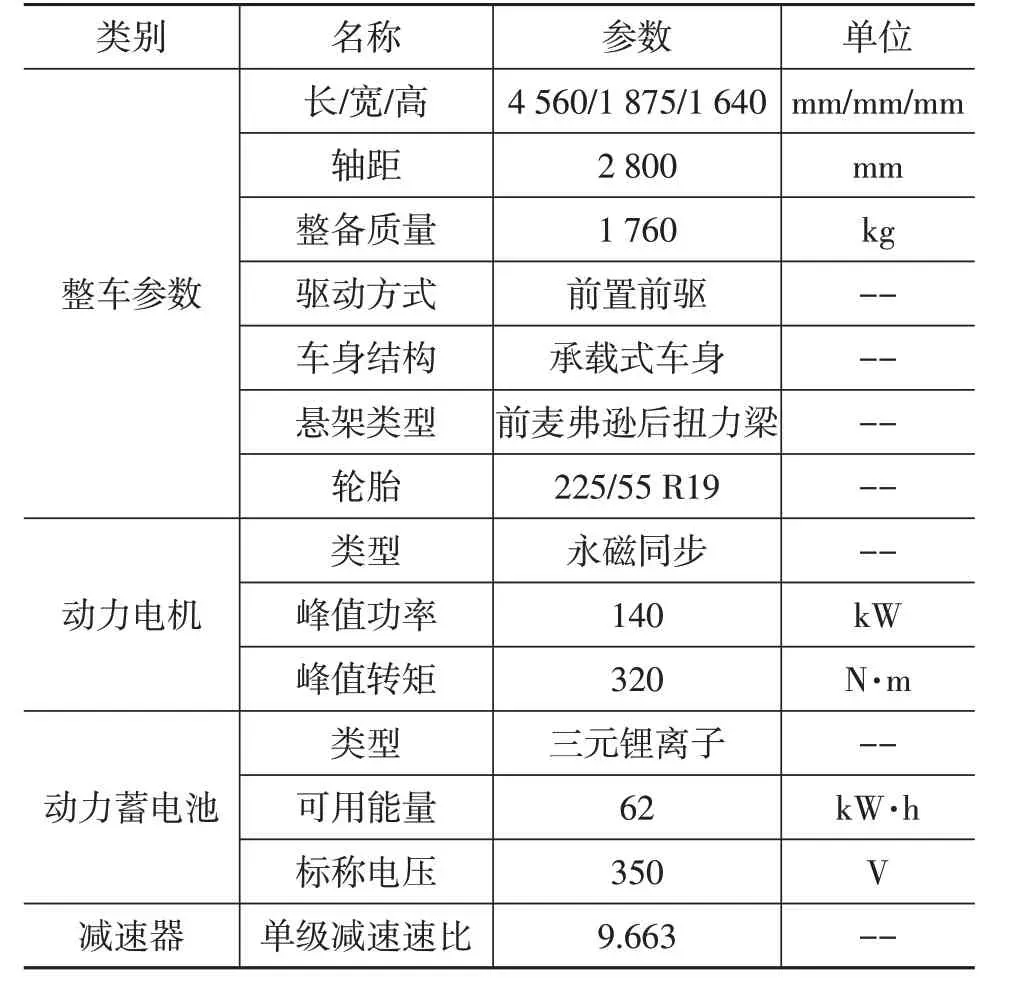
表1 样车技术参数

表2 客观评价优化结果
4 总结
本文基于纯电动汽车,通过对驾驶性主要影响因素分析,对驾驶性评价技术进行了深入研究和实车测试验证,形成了以下几点结论。
(1)确定了静态换挡、起步加速、匀速、滑行减速和制动的驾驶性评价工况;
(2)确定了冲击、迟滞、涌动、加速感、减速感、平顺性和眩晕感的主观评价指标;
(3)确定了最大加速度、响应时间、电机转速峰峰值、加速度峰峰值和冲击度的客观评价指标。
通过驾驶性评价工况、主观评价指标、客观评价指标,可快速、系统优化车辆驾驶性,满足产品开发要求,提升车辆竞争力,为纯电动汽车整车性能设计与优化提供了依据。同时,随着产品开发的深入,可以逐步形成产品评价指标数据库,支撑产品开发。
