北斗三号卫星多频多通道差分码偏差估计与分析
2021-04-28邓远帆张小红刘万科
邓远帆,郭 斐,张小红,刘万科
武汉大学测绘学院, 湖北 武汉 430079
GNSS导航信号差分码偏差(differential code bias,DCB)是指由于硬件延迟导致同一时刻不同频率或同一频率上不同测码信号之间的时延差异,包括卫星端差分码偏差和接收机端差分码偏差[1]。差分码偏差是影响电离层总电子含量(total electron content,TEC)监测和建模的主要误差源[2-4],忽略卫星和接收机DCB会导致TEC计算误差达到数十个纳秒[4-5]。差分码偏差也直接影响利用伪距进行导航定位与授时的精度,其误差可达数米[6-8]。因此,在电离层延迟估计与建模、导航定位与授时等应用中必须准确分离卫星和接收机DCB。自1998年以来,国际GNSS服务组织(International GNSS Service,IGS)启动了电离层工作组,将GPS卫星DCB作为其电离层模型的副产品。从2003年起,IGS分析中心开始提供GLONASS卫星的DCB[9]。文献[10—12]基于GPS观测数据对GPS卫星和接收机的DCB参数进行了一系列的研究,解算结果与IGS发布的结果差异为亚纳秒级。近年来,随着我国北斗卫星导航系统的发展,文献[3]提出采用“两步法”,利用区域电离层模型通过较少的跟踪站即可精确估计北斗二号卫星的DCB。在此基础上,文献[13]在MGEX框架(multi-GNSS experiment,MGEX)下实现了多模GNSS的差分码偏差估计,取得了与欧洲定轨中心(Centre for Orbit Determination in Europe,CODE)、德国宇航中心(Deutsches Zentrum für Luft- und Raumfahrt,DLR)等机构相当的精度。
2020年6月23日,随着最后一颗北斗三号组网卫星成功送入预定轨道,北斗三号全球导航卫星系统星座部署全面完成。相较于北斗二号卫星,北斗三号卫星提供的频率资源和调制方式更加丰富。它不仅继承了北斗二号卫星的频率,还增加了两个互操作频点B1C和B2a,且同一频率具有多个支路,其频点与伪距通道信息见表1[14-19]。北斗三号更多的可用卫星和更加丰富的频率资源为导航定位带来了新的发展机遇。与此同时,多频率多通道信号也衍生出一系列新的偏差亟需解决,而差分码偏差就是其中之一。早在北斗三号系统建设之初,已有学者对北斗三号卫星的DCB估计方法及其特性进行了研究[2,15,20-21]。但受限于当时可用的北斗三号卫星数量较少,且地面接收设备观测值类型的限制,绝大多数研究只聚焦于B1I、B2I和B3I 3个频点的少数几类DCB。截至目前,全球可持续稳定提供DCB产品的机构中国科学院(Chinese Academy of Science,CAS)和DLR分别只提供8种、6种北斗卫星DCB,具体的DCB类型见表2。尽管通过线性组合方式可重构计算部分其他类型的DCB,但仍无法涵盖所有类型的DCB。当前,随着北斗三号系统的全面组网和地面接收机的更新和升级,使得北斗三号多频多通道的DCB研究成为可能。因此,本文针对北斗三号多频多通道的差分码偏差估计研究,对于提升北斗导航定位与授时服务性能具有重要的现实意义。

表1 BDS卫星信号频率与伪距类型[14-19]
1 差分码偏差估计方法
1.1 DCB估计数学模型
忽略伪距观测噪声和多路径误差,任意两种类型的码观测值的观测方程可以表示为[15]
(1)


(2)

通常认为一天内的DCB为常数,将式(2)中无几何组合观测量在一天内取平均,削弱观测噪声和多路径误差,得到综合的DCB观测值
(3)

由于卫星端和接收机端DCB参数线性相关,所形成的法方程秩亏。通常将该类型所有卫星端DCB之和约束为0,即添加“零基准”约束,其约束方程可以表示为
(4)
式中,Ns为该类型DCB所包含的卫星总数。约束方程的不同会导致DCB估计结果的不同,而不同机构采用的约束方程可能不一致,同一机构不同时间受观测卫星数量变化影响其基准也会产生变化。因此,不同机构或不同时间之间的DCB要进行基准统一才能进行比较[23-26]。
1.2 DCB估值基准统一
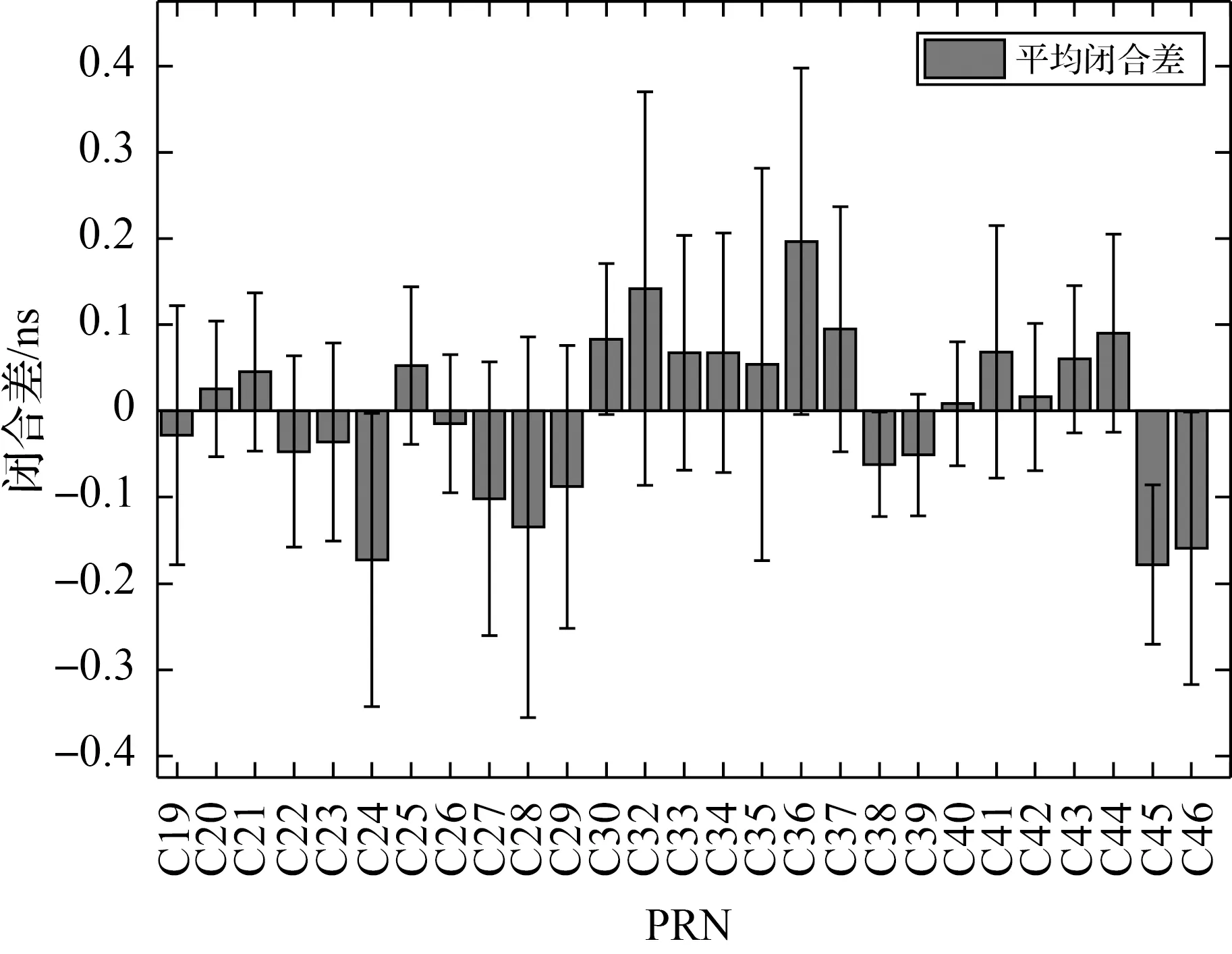
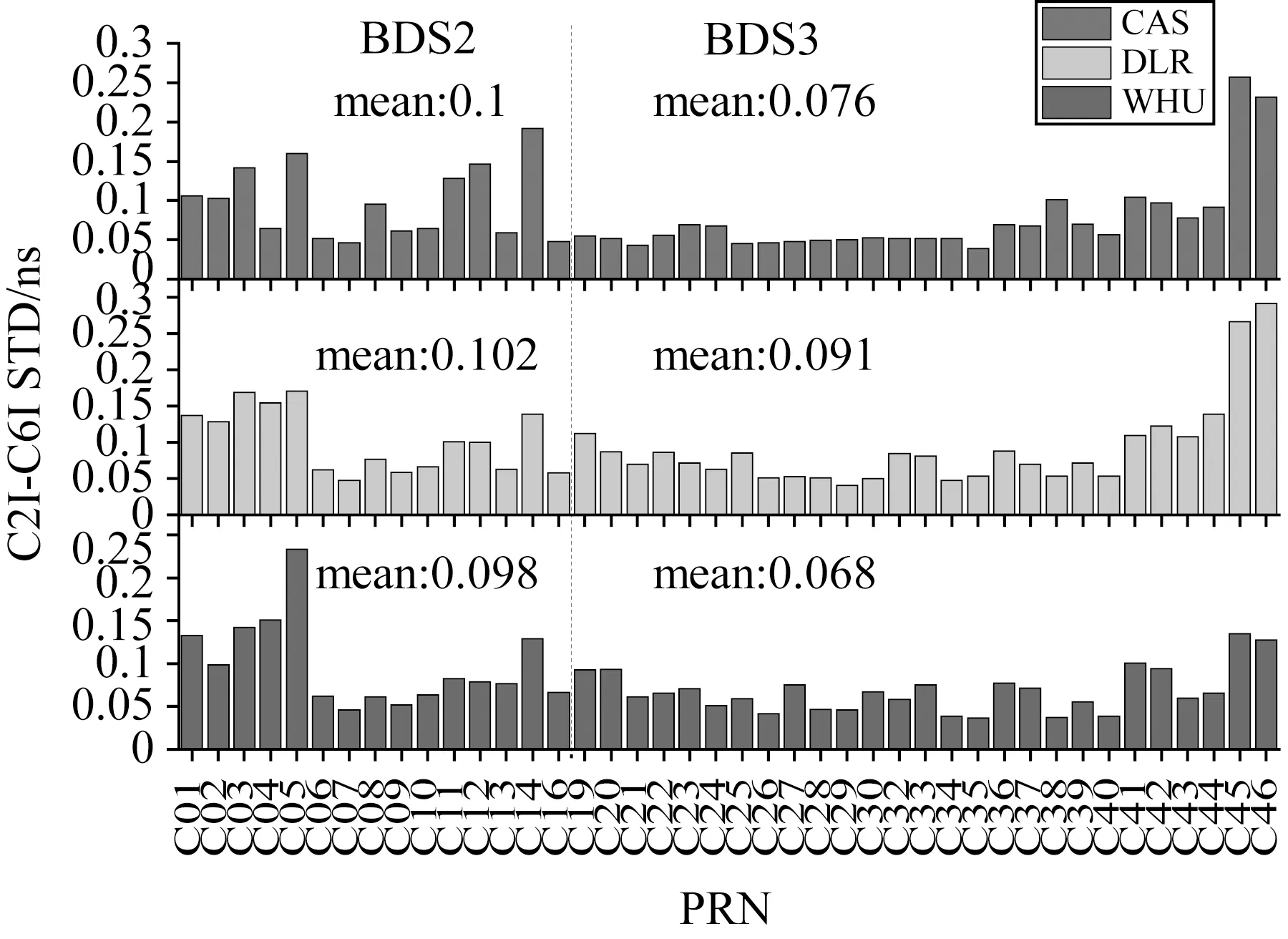
假设A基准有m颗卫星,B基准有A的m颗卫星中的n颗卫星(n (5) (6) (7) 式中,I为m阶单位矩阵。如果n>m,则采用相同的方式,把B基准下的DCB参数调整到A基准下。如果要分析一段时间跨度内DCB的稳定性,由于会存在某些天某些卫星值缺失的情况,选取所有天都有效的卫星施加零基准约束,再将每天的基准统一到此零基准,只有这样,才能对一段时间内的DCB进行稳定性分析。 当前,大部分支持北斗的测站均能接收到C2I、C6I、C7I这3种码观测值,三者之间的DCB容易估计。为了确保其余各类DCB的可估性,首先需要搜集尽可能多的北斗多频多通道码观测值。其次,为了客观评价本文DCB估值与参考值之间的一致性和稳定性,还需要选取与DLR、CAS尽可能相同的测站数及分布。表3为利用2020年4月1日至2020年4月30日(对应DOY 92—DOY 121)一个月内所有IGS站网数据,统计得到的可估DCB类型及可用测站数。将这些测站取并集,综合考虑测站的空间分布与观测质量,得到本文试验所用的58个测站,如图1所示,图中不同颜色代表不同类型的接收机,这与DLR和CAS所选的测站基本一致。 图1 测站分布Fig.1 Distribution of stations 本文使用CODE发布的GIM产品改正电离层延迟。CODE采用基于球谐函数的全球电离层TEC建模方法计算GIM,其内符合精度约为2.4TECU[27-28]。 表3 北斗三号卫星可估的DCB类型及可用测站数(不含C2I-C7I、C2I-C6I、C6I-C7I) 图2给出了DCB估计的数据处理流程。其中,质量控制部分主要包括设置卫星截止高度角为20°、剔除波动大(标准差大于1)和观测数量少(时长小于50 min)的GF组合时间序列;最小二乘中单位权中误差σ0=0.1,依据标准差给综合DCB观测值定权。 由表3可知,可估的北斗三号DCB类型共有19种,各类码组合的可用测站数为17~34个。为了与北斗二号进行比较,同时还估计了C2I-C6I、C2I-C7I、C6I-C7I这3种DCB类型,总共估计得到了22种类型的DCB。其中C2I-C7I、C6I-C7I类型的DCB只存在于北斗二号卫星,C2I-C6I类型的DCB同时存在于北斗二号和北斗三号卫星,其余类型的DCB则只存在于北斗三号卫星。 为了评估北斗三号多频多通道DCB估计的精度和可靠性,从内符合精度、外符合精度、估值稳定性等方面进行分析。需要注意的是,在比较分析之前需要采用1.2节中的方法消除由不同机构的基准差异、同一机构不同时间卫星数量变化引起的基准不一致。 图2 DCB估计Fig.2 DCB estimation 闭合差是反映内符合精度的重要指标,给定任意3个码观测值,可构造3个DCB,但是,理论上只有两个独立的DCB,即3个DCB之间的闭合差为零[29-30]。由于各类DCB是基于不同观测值独立解算的,且平差计算时受观测噪声和模型误差影响,导致其闭合差通常并不等于零。闭合差的大小反映了DCB估值与模型的吻合程度,闭合差越小,内符合精度越高。以北斗三号卫星3个新频点之间形成的3类DCB(C1X-C5X、C1X-C8X、C5X-C8X)为例,图3给出了北斗三号各卫星的每日的DCB闭合差(DCBC1X-C5X+DCBC5X-C8X+DCBC8X-C1X)时间序列。由图3可知,各卫星每日的DCB闭合差在零值附近波动,无显著系统性偏差,且绝大多数闭合差分布在0.3 ns以内。少数卫星如C28、C32、C35卫星分别在DOY 113、DOY 120、DOY 97的闭合差达到1 ns,这可能与当天可用的观测数量和数据质量有关。统计北斗三号各卫星DCB月平均闭合差及其标准差,如图4所示。从图4中可以看出,北斗三号卫星DCB估值的内符合精度较好,平均闭合差都在0.2 ns以内,且大部分优于0.1 ns,其中C40卫星平均闭合差最小为0.008 ns,C36卫星的平均闭合差最大为0.2 ns。各卫星闭合差的标准差都在0.4 ns以内,且大部分优于0.2 ns,这表明C1X-C5X、C1X-C8X、C5X-C8X 3个DCB估值之间具有较好的一致性,内部符合精度较高。其他类型的DCB闭合差具有类似的统计特性,限于篇幅,不单独罗列。 图3 北斗三号各卫星DCB日闭合差时间序列(C1X-C5X、C1X-C8X、C5X-C8X)Fig.3 Time series of BDS-3 satellite DCB daily closure errors (C1X-C5X、C1X-C8X、C5X-C8X) 图4 北斗三号各卫星DCB月平均闭合差及标准差(C1X-C5X、C1X-C8X、C5X-C8X)Fig.4 Monthly mean closure errors and STDs of BDS-3 satellite DCBs (C1X-C5X、C1X-C8X、C5X-C8X) 为了验证北斗三号卫星DCB估计结果的外符合精度,将本文的估计结果(下文简称为WHU)与CAS和DLR机构的DCB产品进行比较。除C2I-C6I之外,CAS和DLR的DCB产品中分别有6种、4种北斗三号卫星DCB类型,将其依次与WHU求差,得到北斗三号各卫星DCB估值的外符合精度,如图5、图6所示。从图5中可以看出WHU和CAS的平均偏差基本都在0.1 ns以内,这说明WHU与CAS的DCB产品之间一致性较好。其中C25卫星C1X-C8X类型DCB平均偏差较大,达到0.3 ns,这与C1X-C8X类型DCB的数据质量有关,见表3,用于估计C1X-C8X类DCB的测站数量仅为17,明显少于其他DCB类型。从图6中可以看出,除C45卫星之外,WHU与DLR之间DCB的平均偏差基本在0.2 ns以内,说明二者之间也具有较好的一致性。至于C45卫星,DLR和WHU之间C1X-C2I、C2I-C5X两种类型的DCB差值分别为-0.88、1.15 ns。这与该卫星的数据、质量和这两类DCB的稳定性有关,分析DLR和WHU的DCB估值方差-协方差矩阵发现,所有卫星C1X-C2I的月平均标准差分别为0.054、0.051 ns,而C45卫星的标准差分别为0.308、0.155 ns;类似的,C45卫星C2I-C5X的月平均标准差分别为0.135、0.213 ns,显著大于其他卫星。 图5 WHU与CAS估计的6种北斗三号卫星DCB之间的平均偏差Fig.5 The 6 types of BDS-3 satellite DCB mean differences of WHU and CAS 图6 WHU与DLR估计的4种北斗三号卫星DCB之间的平均偏差Fig.6 The 4 types of BDS-3 satellite DCB mean differencesbetween WHU and DLR 尽管CAS和DLR只提供少数几种DCB产品类型,但是根据DCB之间的线性关系,可利用已有的DCB类型经过转换得到一些新的DCB类型,比如DCBC1X-C8X=DCBC1X-C5X+DCBC5X-C8X。因此,还可将WHU的DCB估值与CAS和DLR的部分DCB转换值进行间接比较,如图7、图8所示。从图7和图8中可以看出,相比于图4和图5中DCB估值的直接比较法,由于受误差传播的影响,间接法获得的各机构之间的DCB差值明显更大,一致性较差,其差值分布在1 ns之内,这也说明了直接估计多频多通道DCB的必要性。 图7 WHU与CAS的13种北斗三号卫星DCB(转换值)之间的平均偏差Fig.7 The 13 types of BDS-3 satellite DCB (transform values) mean differences between WHU and CAS 图8 WHU与DLR的7种北斗三号卫星DCB(转换值)之间的平均偏差Fig.8 The 7 types of BDS-3 satellite DCB (transform values) mean differences between WHU and DLR 为分析北斗三号卫星DCB估值的稳定性,首先选取3个新增频点上的码观测值C1X、C5X和C8X构成的DCB类型C1X-C5X、C1X-C8X为例,将2020年4月内各卫星对应的DCB每日估值的时间序列绘于图9。可以看出,大多数卫星的DCB估值分布在±20 ns,少数卫星的DCB数值较大,其中C33卫星的DCB估值达到-78.2 ns左右,在导航定位与授时中若不考虑,将带来严重的系统偏差。在一个月的时间内,各卫星的DCB估值变化较小,表明它们具有较好的天稳定度。 图9 BDS-3各卫星C1X-C5X和C1X-C8X DCB时间序列Fig.9 Time series of BDS-3 satellites C1X-C5X and C1X-C8X DCB 进一步分析各类DCB的稳定性,表4给出WHU、CAS和DLR直接估计或通过线性转换得到的DCB值的月平均标准差(STD)。其中,黑体表示线性转换值。由表4可知,WHU的DCB估值稳定性普遍优于CAS和DLR,反映本文估计的DCB稳定性良好。DLR的平均STD虽优于CAS,但其产品提供的DCB类型较少,且涵盖的码观测值类型也较少,导致某些DCB类型无法通过线性转换得到。利用CAS的DCB产品,虽然可通过线性转换恢复所有DCB类型,但因受误差传递和累积的影响,转换得到的DCB稳定性明显较差,进一步说明了直接估计多频多通道DCB的必要性。 表4 北斗卫星DCB的月平均STD 此外,本文还对比分析了北斗三号卫星与北斗二号卫星DCB估值的稳定性。以北斗二号和北斗三号共有的C2I-C6I类型DCB为例,图10给出了WHU、CAS和DLR对应的DCB估值月平均标准差。统计结果表明,WHU北斗二号、三号卫星DCB的平均STD分别为0.098、0.068 ns;CAS分别为0.1、0.076 ns;DLR分别为0.102、0.091 ns。总体而言,北斗三号卫星的DCB估值的稳定性略优于北斗二号。北斗二号卫星中C01-C05(GEO卫星)的稳定度较差,北斗三号卫星中C45、C46卫星稳定度较差,这与前面的分析一致。 图10 北斗卫星DCB STD对比Fig.10 DCB STD comparison of BDS satellites 本文利用最新的北斗实测数据,研究了北斗三号卫星多频多通道差分码偏差估计方法,准确分离了所有可估的DCB类型,并从内符合精度、外符合精度、稳定性3个方面进行了分析,得出以下结论: (1) 当前,北斗三号卫星在6个频点上提供18种码观测值。本文基于IGS跟踪站实测数据,估计得到了22种不同类型的DCB。而目前能持续稳定提供DCB产品的机构CAS和DLR只提供少数几种类型的北斗DCB。 (2) 北斗三号卫星DCB估值的内符合精度较好,平均闭合差在0.2 ns以内,且大部分优于0.1 ns,估值之间具有较好的一致性。以CAS和DLR提供的DCB估值为参考,本文DCB估值的平均偏差为0.1~0.2 ns,具有较高的外符合精度。 (3) 尽管利用CAS和DLR提供的DCB产品可以通过线性组合方式,转换得到一些其他类型的DCB,但是,由于受到误差传递与积累的影响,转换得到的DCB精度和可靠性不如直接估计的DCB。 (4) 北斗三号卫星DCB估值具有较好的长期稳定性,一个月内的平均标准差约为0.1 ns。相比于北斗二号卫星,北斗三号卫星的DCB稳定性相对更优。 需要说明的是,当前可用于估计北斗三号卫星各类DCB的测站数量仍然有限,仅有17~34个站,北斗多频多通道的DCB估计仍有较大的提升空间。

2 试验数据与处理策略
2.1 试验数据获取


2.2 数据处理策略

3 试验结果与分析
3.1 内符合精度分析

3.2 外符合精度分析




3.3 估值稳定性分析


4 结论与展望