基于均值聚类和循环导向滤波算法的农业图像去雾研究
2021-04-26田源
田 源
(河南牧业经济学院,河南 郑州 450044)
1 前 言
利用遥感图像可以对现代化农业进行精准作业,但是在雾霾天气条件下,大气粒子的散射使得成像质量较差,存在色彩失真、模糊不清,从而导致图像信息不易提取。因此农业图像去雾对提高现代农业效率具有重要意义[1]。
目前大多数研究是利用有雾图像本身条件,估算出大气光强度值以及雾化透射率。Fattal R[2]通过独立分量分析的方法估计雾气场景的反射率,结合马尔可夫随机理论判断图像颜色,最终减少图像雾化程度,但是马尔可夫进行数理统计需要足够多的颜色信息,因此浓雾状态以及较暗图像的去雾效果不好;Tan R T[3]通过最大化图像的局部对比度达到去雾目的,但是去雾图像容易过饱和,且在边界处易产生光晕现象;Tarel J P等[4]通过中值滤波对有雾图像操作,估算出大气散射光值,但中值滤波没有对图像边缘优化,在图像较小边缘区域去雾效果不佳;He K M等[5]利用暗通道先验来求取粗略透射率,利用软抠图算法优化透射,但是对于图像高亮区域无法进行暗通道先验方法;Nishino K等[6]采用贝叶斯概率模型对图像去雾,能有效减少雾的影响,但要通过统计先验求解概率模型;Laurence M L等[7]通过自适应滤波的方法对光照进行估计,较好地消除了光晕现象,但该算法需要逐点进行计算,算法的时间复杂度较高。
本文采用均值聚类和循环导向滤波算法(mean clustering and loop guided filtering,MCLGF)对农业图像去雾,任意选取两个子特征向量作为初始聚类中心,将有雾图像通过均值聚类分为天空区域和非天空区域,在天空区域中求取原图的最大像素值作为大气光值;通过循环导向滤波优化实现细节平滑和边缘保持。实验仿真显示:本文算法能够有效地降低图像中的雾气,同时结构相似度、信息保真度、图像信息熵和可见边的正则梯度均值这4个评价指标相比其他算法较好。
2 农业图像去雾
2.1 雾天图像光学模型
雾天图像光学模型为
I(x)=J(x)t(x)+A(1-t(x))
(1)
式中:I(x)是获得的原始含雾图像;J(x)是清晰图像;A是空气的大气光强度值;t(x)∈(0,1)是雾化透射率。J(x)t(x)是光线传递时的直接减弱项,A(1-t(x))是大气光的增强作用,去雾的目标就是从I(x)中恢复J(x)、A和t(x)等相关系数[8]。
2.2 基于均值聚类的大气光强度估计
把有雾图像通过均值聚类方法划分天空、非天空两个区域[9],同时在天空区域中求取最大像素值作为空气的大气光值。
步骤1:选取色调(H)、饱和度(S)、明度(V)3个颜色特征以及比度(F)和能量(E)两个纹理特征。则图像中像素点的特征向量X=(H,S,V,F,E)T。
步骤2:黄绿蓝RGB空间转换到HSV空间,计算像素特征向量为
(2)
式中:ζ=(gmax,rmax,bmax);ξ=(gmin,rmin,bmin)。
(3)
V=ζ
(4)
式中:r、g、b分别红绿蓝三通道的值;F、E由灰度共生矩阵得到。
步骤3:任意选取两个子特征向量作为初始聚类中心。
步骤4:求解每个对象与每个中心的最小距离值,这样将每个对象划分出最相似的类。其中距离M为
(5)

步骤5:更新类的中心,即计算每个类中对象的平均值作为新的中心,其中均值计算公式为
(6)
步骤6:循环步骤4到步骤5直到每个聚类不再明显地变化,说明所有的像素点都已分类,聚类函数已经收敛,输出结果。
步骤7:根据分类计算结果,图像被判断为2个不同的类,其中一个类判断为天空区域,另外一个类则判断为非天空区域。通过设置不同系数值计算出天空区域3个通道的亮度均值:
lmean=(0.32lr+0.56lg+0.12lb)/ntotal
(7)
式中:lr、lg、lb为3个通道的天空区域亮度值;ntotal为天空区域的总像素数。
结合聚类中心的亮度值与天空区域的亮度均值获得大气光最终亮度值:
A=ηl0+(1-η)lmean
(8)
式中:l0为聚类中心亮度值;η∈(0.65,0.85)为调节因子。
2.3 透射率计算
2.3.1 循环导向滤波优化
为了避免去雾图像颜色过饱和[10],通过循环导向滤波优化,这样使得细节平滑和提高边缘保持能力,主要分为细节平滑和边缘保持两个过程。
(1)细节平滑过程:输入图像记为G,输出图像记为G′,p和q分别为输出、输入图像中的像素点,σ为邻域内标准差,滤波形式为
(9)
式中:α∈(0,1)为归一化因子;G(p)为输入图像中以像素点p为中心的邻域内像素点数;N(p)是以像素点p为中心的邻域内像素点数。
这样消除了比σ小的纹理细节。

(10)
式中:β∈(0,1)为归一化因子;τ为邻域内标准差;N(p)是以像素点p为中心的邻域内像素点数。
在循环迭代过程中逐渐减小引导图窗口大小以增强输出图像的平滑性,如此循环反复直到输出平滑性良好的输出图像。迭代次数越多,传输图的平滑性越好,但会带来更多的时间消耗,本文迭代次数选为t=7,导图窗口最大为15像素×15像素。
2.3.2 透射率求解
导向滤波器是引导图Iguide与滤波输出结果t2(x)之间的一个局部线性模型[11],可以认为t2(x)是在大小为ω,以像素k为中心的窗口内所有像素的线性变换:
t2(x)=λIguide+φ
(11)
式中:(λ,φ)是线性变换系数,在窗口ωk内是常量。
为了使得导向滤波器的输出、输入图像之间差异性最小,利用最小化代价函数确定出线性函数E(λ,φ):
(12)
式中:ε为调整参数,防止λ过大;t1(x)为输入图像在i处的像素;w(k)为以像素k为中心的窗口。
E(λ,φ)能够使输人图像与输出图像差异最小化,因此t2(x)保留了t1(x)的总体特征。
2.4 农业图像去雾
在通过均值聚类方法获得大气光强度A后,将A和t2(x)带入式(1)中,J(x)减少雾化程度为
(13)
分母取t2(x)、t0中较大值;当t2(x)→0时,会使得J(x)引人噪声,因此设置一个下界值t0=0.1。
3 实验仿真
3.1 主观评价
实验平台为CPU:Intel core i5-4460,3.0 GHz;内存:4 G,软件平台为Matlab7.0。实验涉及的算法有Fattal、Tan、Tarel、He、Nishino、Laurence以及本文MCLGF算法。视觉效果对比分析2组不同的农业有雾图像,图1和图2分别为各种算法对有雾图像1和有雾图像2的去雾对比效果。

图1 各种算法对有雾图像1去雾对比效果Fig.1 Image No.1 dehazing contrast effect of various algorithms
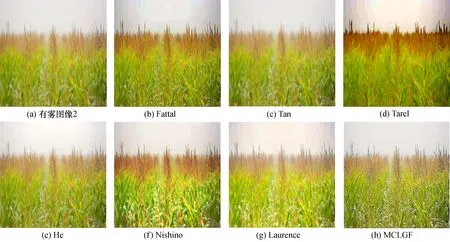
图2 各种算法对有雾图像2去雾对比效果Fig.2 Image No.2 dehazing contrast effect of various algorithms
从图1、图2的对比2组实验结果可以看出:本文MCLGF算法能够有效地降低图像中的雾气,整体亮度有所增加,改善了图像的光照情况,细节也有了一定程度的恢复,比如经过去雾后,在图1(h)中可以清楚地看见远处树的边缘,有利于应用到农田的识别分割;在图2(h)中远处可以看见玉米的形状以及层次信息,MCLGF算法尤其突出在对于远距离景物的处理效果,图像更清晰,更符合人眼视觉的主观感受。其他算法存在颜色失真,以及雾霾没有被降低的缺陷。
3.2 客观评价
从结构相似度(structural similarity,SS)、信息保真度(information fidelity,IF)、图像信息熵(information entropy,IE)和可见边的正则梯度均值(regular gradient mean,RGM)4个评价指标来评价农业图像去雾效果[12~15]。SS是基于图像特征信息相似度的评测指标,用于反映视觉信息的局部相似映射,值越大,说明去雾前后的结构相似度越高,算法的结构保持性能越好;IF通过计算去雾前后图像之间的互信息量对图像质量进行评价,值越大,算法的信息保真性能越好;IE衡量视觉系统对视觉信号(如光照度、对比度和频率信息)的敏感度,值越大,说明去雾结果的对视觉和细节信息的复原效果更好;RGM值越大,农业图像去雾效果越好。经过45次蒙特卡罗仿真实验,各种算法对有雾图像处理后的评价结果如图3所示。其中:图3(a1)、(b1)为各种算法对有雾图像1、图像2处理后的SS值;图3(a2)、(b2)为各种算法对有雾图像1、图像2处理后的IF值;图3(a3)、(b3)为各种算法对有雾图像1、图像2处理后的IE值;图3(a4)、(b4)为各种算法对有雾图像1、图像2处理后的RGM值。

图3 各种算法对有雾图像处理后的评价值Fig.3 Values of various algorithms for image dehazing
从图3可以看出,本文算法MCLGF在结构相似度、信息保真度、图像信息熵和可见边的正则梯度均值4个评价指标相比其他算法较好,其中:有雾图像1处理后的结构相似度平均值为0.98,有雾图像2处理后的结构相似度平均值为0.97;有雾图像1处理后的信息保真度平均值为0.96,有雾图像2处理后的信息保真度平均值为0.94;有雾图像1处理后的图像信息熵平均值为8.95,有雾图像2处理后的图像信息熵平均值为9.12;有雾图像1处理后的正则梯度均值为0.84,有雾图像2处理后的正则梯度均值为0.85。
4 总 结
本文采用均值聚类和循环导向滤波算法对农业图像去雾,通过均值聚类在天空区域中求取原图的最大像素值作为大气光值;循环导向滤波实现细节平滑和边缘保持。实验仿真显示本文算法能够有效地降低图像中的雾气,同时结构相似度评价指标可达0.98、信息保真度评价指标可达0.96、图像信息熵评价指标可达9.12,可见边的正则梯度均值评价指标可达0.85,相比其他算法较好,为农业图像去雾研究提供了一种新方法。
