AIS与GNSS在无人船桥梁避碰中的应用
2021-04-22
上海海事大学 上海 浦东 201306
一、无人驾驶船桥梁避碰的可行性分析
(一)问题分析。由于桥梁在船用雷达中不能准确的显示出各个桥墩的位置,这增加了未来无人驾驶船舶撞击桥梁的风险。一旦船舶和桥梁发生碰撞,即使航行速度很慢但仍会造成桥梁和船体的损坏,甚至造成航线的拥堵,再加上后期水上对船舶与桥梁的修复的施工困难性,所造成的经济损失也是十分巨大的。所以十分有必要对桥梁的桥墩进行标记来告知船舶。
船舶自动识别系统(简称AIS)可实时监测船舶的航向、航速和位置等信息,利用这一实时数据可对船舶过桥时的运动状态进行监控,当船舶与桥梁将要发生碰撞危险时主动对船舶发出警报,实现船桥碰撞预警。在海洋航行公约中规定了船舶必须携带有AIS收发装置来对外广播自身航行信息,同时收取周边船只的航行信息。因此,AIS设备的运用与发展为解决船桥碰撞问题提供了新思路。传统的AIS设备多为通信中继或是通信基站的作用,这里可以创新的将其运用到船桥避碰系统中。此外,通过将北斗系统与GPS系统相结合,利用其各自的优势实现对桥墩的精准定位,双系统的结合提高了整个系统的精度,进而对船桥避碰装置的安全性,可靠性和实用性提供了有力的保障。
(二)总体设计思路。近年来AIS技术得到了快速发展,其传输的信息中包含了船舶的航向、航速和位置等信息,为解决船桥碰撞问题提供了新思路。因此,我们可使用AIS信息中的实时数据对船舶过桥时的运动状态进行监控,当检测船舶有一定的碰撞桥梁的趋势时,可以通过单片机进行计算来将正确的航行方向与航行速度传回给船舶,从而实现无人船的安全平稳的过桥。
1.无人驾驶船桥梁避碰的设计框架
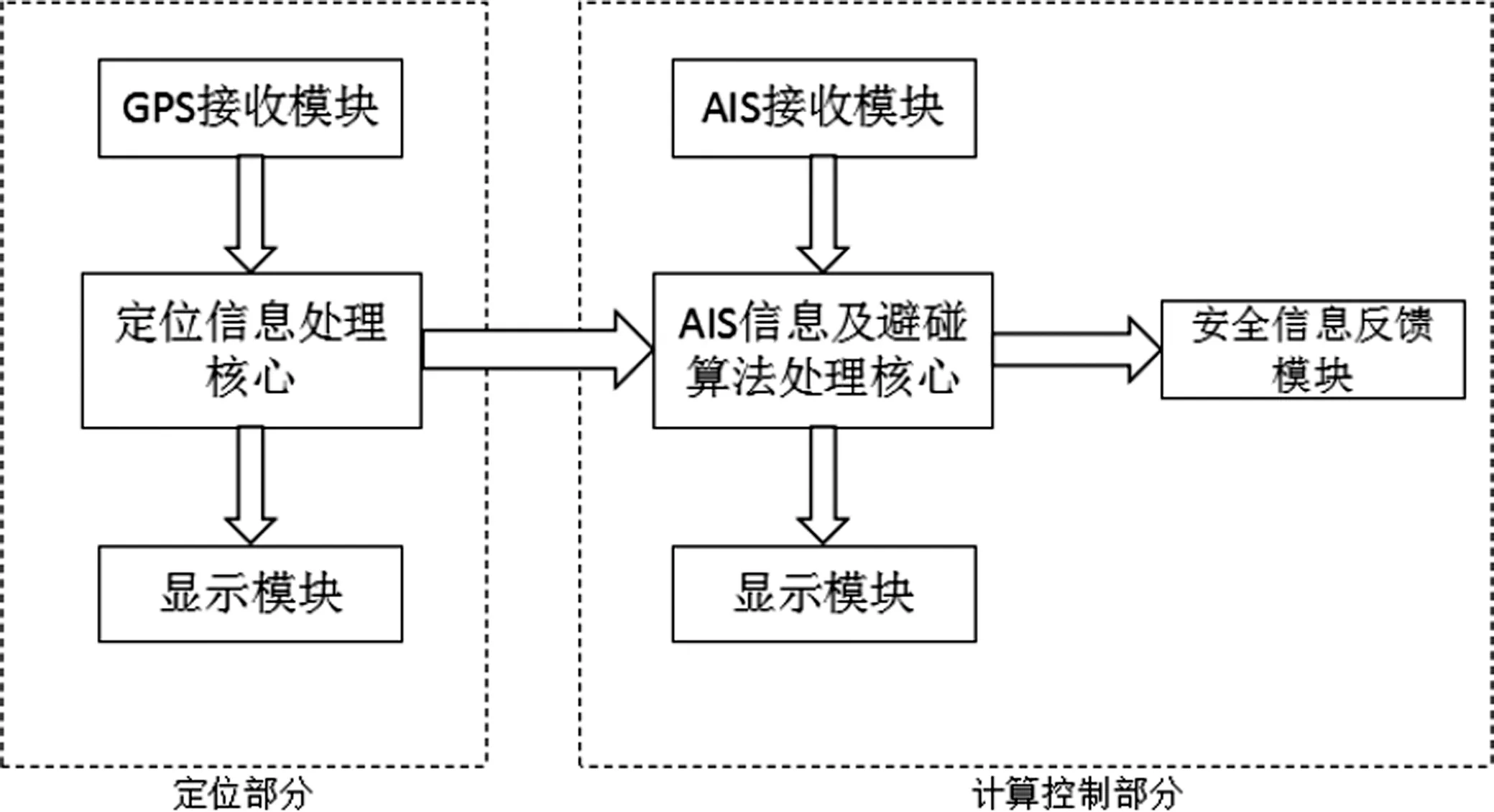
图1 无人驾驶船桥梁避碰的设计框架图
定位部分主要是获取桥梁各个桥墩的经纬度信息和UTC时间信息,计算控制部分主要是解析AIS信息数据,并运用一定的避碰算法来计算船舶是否具有碰撞桥梁的风险。安全信息反馈模块可以将正确的航行信息反馈给驶来的无人船。
对于定位部分的实现可以通过将多个用于GPS定位的蘑菇头分别装配到每个桥墩的位置来实现,而对于信息的反馈可以通过简单的近距离无线数据传输单元来进行实现。
2.AIS与GPS数据的获取。通过VHF甚高频天线,可以获取到AIS报文信息,因为报文中数据部分是以6bit二进制码存储的,所以要将报文中数据部分进行解算才能更加方便的被我们所使用。接下来将解析出的二进制流参照电文比解析表提取出需要的船舶航速、航向、经纬度信息。这样AIS信息的读取就完成了。
将用于GPS定位的蘑菇头放置在桥墩位置,以确定桥墩经纬度信息。对于GPS信息的读取大多数模块使用了NMEA-0183协议进行通信。该协议以文本方式传输数据,采用ASCII码来发送定位信息。一帧数据的格式通常为:MYMaabbb,ccc,ccc,…,ccc*dd(CR)(LF),其中 MYM 表示一帧数据开始,也就是数据读取的启示标志符;aabbb表示地址域,aa用于信号识别,bbb表示语句种类,根据这三个字符可以判断出一条GPS数据是用于哪种信息的传递,其中当其为GGA时后面数据对应的是当前的位置信息,也就是说,我们只用将这个数据提取出来即可;ccc...ccc是所传输的数据;*表示语句数据结束;dd用于一帧数据的校验;(CR)(LF)回车和换行字符,表示一帧数据结束。
了解了如何提取数据之后便可以在单片机上进行相应的编程,来获取AIS与GNSS的数据用于后续的处理。
3.嵌入式系统电路部分的设计。可以将嵌入式系统的主控芯片与所用引脚的控制与保护电路以及AIS高频接收电路、JTAG调试电路、GPS接收电路、安全信息反馈电路进行集成,用单独的一块集成电路来方便生产与维修更换。
AIS高频接收电路主要通过外置天线来接收采集船舶对外发送的信号来用以判断船舶的具体位置。而外部的蘑菇头接收器则与内部的GPS模块相连接用以内部的自身位置的判定,以便完成后期的距离判定。主控芯片用于对收集到的数据进行运算处理,如果运算出无人船有碰撞桥梁的风险时其中的安全信息反馈模块将启动,并发送数据以提醒无人船将会有撞桥的危险,告知船舶可以根据传回的数据提示来改变航行的角度和速度。为了方便对各个模块进行分别测试,加装了JTAG调试,对内部结点进行测试。
为了方便供电,整机电源可以由外部的220VAC转12V
DC的开关电源接入市电为整机供电。主板可以将此12V电源分为两路,一路为AIS高频接收电路板供电,一路送到集成电路的一级电源进行降压,将12V电压降到5V供后续电路使用。同时考虑到桥梁上有充足的光能和风力资源,也可以在其上加装小型的光伏或风力发电装置来实现自身的供电。
4.安全信息反馈单元的算法。通过分析AIS解算出船舶的航向、航速、经纬度,通过GPS确定桥墩位置,将船舶和桥墩放在以正北方向为Y轴正方向,以正东方向为X轴正方向的直角坐标系中。通过解析三角形,获得DCPA与TCPA。
安全信息反馈单元设计图如下:

图2 安全信息反馈单元设计图
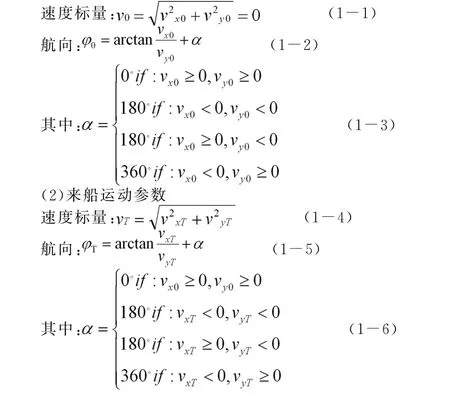
以桥墩为原点,建立直角坐标系,X轴指向正东,Y轴指向正北,即北方向为正,正东方向为正。桥墩S0的二维坐标为(x0,y0),运动速度为(vx0,vy0);来船ST坐标为(xT,yT),运动速度为(vxT,vyT),则:
(1)桥墩运动参数

(三)应用前景。不单单服务于未的无人船,在当下的船舶运输中,虽然船舶与桥梁发生碰撞的事故不多,但也不是完全可以避免的,对于船员的疲劳情况下的误判断也可以提供及时有效的提醒,来告知其及时操作船只避免碰撞的发生。
同时,集成电路也可以扩展出其他额外的应用,比如现有的桥梁检测装置也可以附加进来,这样不仅不会增加桥梁的额外负担,同时也扩展了原有的检测系统的功能,甚至可以实现多个设备的联机来远程管理等也就相当于将桥梁这一设施智能化了。

图3 船桥避碰矢量三角形
二、结语
综上所述,通过AIS与GNSS的结合使用可以较好的完成无人船自主安全过桥,但对于一些其他的细节性问题还需要更多的思考来进行完善。随着智能化的发展与壮大,各种智能化的设备也将越来越普及,而对于这些智能化设备的对应设施还不够全面与齐全,对于未来的例如无人船,真正的自主安全运行中的一些细节性的问题还需要更加全面的,细致的跟进,本篇文章仅就其中的桥梁避碰这一实际的问题提出一定的解决方案。希望能为未来智能化设备的发展和应用提供一定的借鉴参考意义。
